基于道路工況預(yù)測(cè)的混合動(dòng)力汽車自適應(yīng)等效燃油消耗最小策略*
2019-07-10 05:35:04鄧濤羅遠(yuǎn)平程棟羅俊林
汽車技術(shù) 2019年6期
關(guān)鍵詞:卡爾曼濾波
鄧濤 羅遠(yuǎn)平 程棟 羅俊林
(重慶交通大學(xué),重慶 400074)
主題詞:混合動(dòng)力汽車 能量管理 車速預(yù)測(cè) 坡度預(yù)測(cè) 仿真
1 前言
混合動(dòng)力汽車結(jié)合了純電動(dòng)汽車的節(jié)能優(yōu)勢(shì)和傳統(tǒng)汽車的動(dòng)力性,其動(dòng)力系統(tǒng)一般有2種或2種以上的動(dòng)力源,這就需要依靠能量管理策略對(duì)各動(dòng)力源的工作狀態(tài)進(jìn)行合理的控制。相較于其他能量管理策略,實(shí)時(shí)優(yōu)化策略可通過(guò)求解局部最優(yōu)解獲得接近于全局最優(yōu)的結(jié)果,且具有實(shí)時(shí)在線優(yōu)化的能力。常見(jiàn)的實(shí)時(shí)優(yōu)化能量管理策略有動(dòng)態(tài)規(guī)劃(Dynamic Programming,DP)[1]、極小值原理(Pontryagin's Minimum Principle,PMP)[2]、模型預(yù)測(cè)控制(Model Predict Control,MPC)[3]以及等效燃油消耗最小策略(Equivalent Consumption Minimization Strategy,ECMS)[4-6]等。其中,ECMS計(jì)算速度快,容易實(shí)時(shí)控制,最有希望應(yīng)用于實(shí)車,但其需要知曉整個(gè)循環(huán)工況來(lái)求解全局燃油經(jīng)濟(jì)性最佳的等效因子,因此,工況的確定是ECMS的重要前提。另外,傳統(tǒng)的ECMS在整個(gè)行駛工況中只利用單一的等效因子,會(huì)導(dǎo)致SOC偏離較大。所以,ECMS在進(jìn)行計(jì)算時(shí)需要根據(jù)預(yù)測(cè)工況或SOC反饋實(shí)時(shí)調(diào)整等效因子,即形成基于工況預(yù)測(cè)調(diào)節(jié)的自適應(yīng)等效燃油消耗最小策略(Adaptive Equivalent Consumption Minimization Strategy,A-ECMS)[7]和基于SOC反饋的自適應(yīng)等效燃油消耗最小策略[8]。其中,基于SOC反饋的A-ECMS在整個(gè)行駛工況中SOC波動(dòng)比較頻繁,會(huì)降低電池的使用壽命。
工況預(yù)測(cè)主要包括車速預(yù)測(cè)和坡度預(yù)測(cè)兩部分。對(duì)于車速預(yù)測(cè),神經(jīng)網(wǎng)絡(luò)[9]、馬爾科夫鏈[10]和灰色預(yù)測(cè)[11]等預(yù)測(cè)方法應(yīng)用較為廣泛。神經(jīng)網(wǎng)絡(luò)需要存儲(chǔ)大量的歷史數(shù)據(jù)進(jìn)行離線訓(xùn)練,馬爾科夫鏈也需要大量的歷史數(shù)據(jù)作為樣本來(lái)確定轉(zhuǎn)移概率矩陣,而灰色預(yù)測(cè)建模是基于少量數(shù)據(jù),根據(jù)新陳代謝原理建立的等維信息模型,使信息保持“新鮮”性的同時(shí)不增加計(jì)算量,特別適合在實(shí)時(shí)控制系統(tǒng)中應(yīng)用[12]。對(duì)于坡度預(yù)測(cè),可以利用智能交通系統(tǒng)(Intelligent Transport System,ITS)(包括GPS/GIS)對(duì)坡道進(jìn)行預(yù)測(cè),但需要較高品質(zhì)的GPS信號(hào)作為保障,低成本的GPS模塊很難達(dá)到很好的計(jì)算效果[13],此外,帶遺忘因子的最小二乘法[14]或卡爾曼濾波[15]等方法也常用于在線估算道路坡度,卡爾曼濾波在計(jì)算的精確性和算法的穩(wěn)定性方面都優(yōu)于帶遺忘因子的最小二乘法。
因此,本文采用預(yù)測(cè)工況實(shí)時(shí)調(diào)整等效因子,建立基于道路工況預(yù)測(cè)的A-ECMS。對(duì)灰色預(yù)測(cè)算法中的權(quán)系數(shù)進(jìn)行迭代尋優(yōu),提高了未來(lái)車速預(yù)測(cè)精度;研究了道路坡度的線性關(guān)系,提出對(duì)卡爾曼濾波估計(jì)出的道路坡度進(jìn)行線性擬合,并以擬合的線性函數(shù)的曲率變化來(lái)預(yù)測(cè)道路坡度。最后根據(jù)預(yù)測(cè)的未來(lái)短期道路工況調(diào)整合適的等效因子,達(dá)到優(yōu)化SOC軌跡、優(yōu)化需求轉(zhuǎn)矩分配以及提高燃油經(jīng)濟(jì)性的目的。
2 道路工況預(yù)測(cè)
2.1 基于改進(jìn)型灰色預(yù)測(cè)的車速預(yù)測(cè)
以某款并聯(lián)式AMT混合動(dòng)力汽車作為研究對(duì)象,結(jié)構(gòu)如圖1所示,主要部件參數(shù)如表1所示。
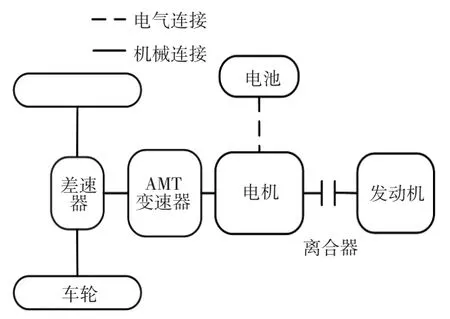
圖1 并聯(lián)式HEV動(dòng)力系統(tǒng)結(jié)構(gòu)
采用灰色預(yù)測(cè)算法進(jìn)行車速預(yù)測(cè)時(shí),首先要確定用于計(jì)算的原始數(shù)據(jù)數(shù)列。對(duì)于車速預(yù)測(cè)來(lái)說(shuō),汽車行駛速度為隨時(shí)間變化的一系列參數(shù),楊盼盼[11]通過(guò)分析得到利用過(guò)去12 s的車速信息預(yù)測(cè)未來(lái)6 s的車速信息最為合理的結(jié)論,但本文在算法上與其不同,根據(jù)實(shí)際需要,決定以過(guò)去10 s車速信息預(yù)測(cè)未來(lái)10 s車速。因而基于灰色預(yù)測(cè)的車速預(yù)測(cè)的原始數(shù)據(jù)序列X(0)為汽車前10 s的速度數(shù)據(jù)序列。
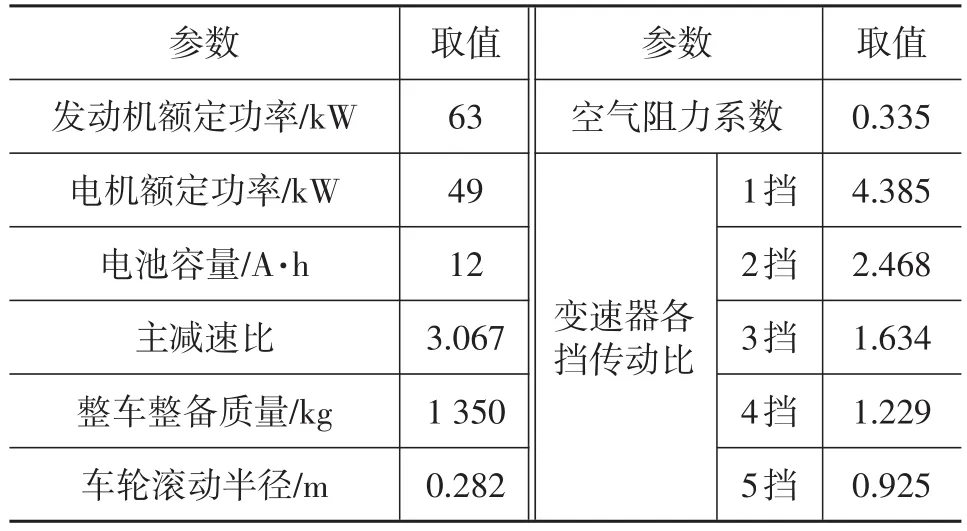
表1 整車參數(shù)
將原始數(shù)據(jù)依次累加,生成具有較好規(guī)律的1-AGO累加序列。再將1-AGO序列相鄰數(shù)據(jù)分別乘以權(quán)系數(shù)μ生成緊鄰序列并進(jìn)行相應(yīng)參數(shù)求解,然后對(duì)所得數(shù)據(jù)序列累減得到原始序列的預(yù)測(cè)值,最后再對(duì)未來(lái)值進(jìn)行預(yù)測(cè)[16-18]。在分析灰色預(yù)測(cè)算法計(jì)算過(guò)程時(shí)發(fā)現(xiàn),為簡(jiǎn)化計(jì)算量,一般取μ=0.5,但這會(huì)影響預(yù)測(cè)精度。因此選用迭代計(jì)算,以數(shù)據(jù)的平均相對(duì)誤差為判斷依據(jù)尋求最優(yōu)權(quán)系數(shù),其具體過(guò)程見(jiàn)文獻(xiàn)[19]。
經(jīng)過(guò)計(jì)算,可以得到原始序列的擬合方程為:

式中,a為發(fā)展系數(shù);b為內(nèi)生控制系數(shù);^(0)為原始數(shù)據(jù)擬合序列;x(0)(1)為原始數(shù)據(jù)序列的第1個(gè)數(shù)據(jù)。
經(jīng)大量仿真分析發(fā)現(xiàn),發(fā)展系數(shù)a→0時(shí),灰色預(yù)測(cè)模型的精度相對(duì)較高,也表示與前一段時(shí)間車速相關(guān)性較強(qiáng)。于是在仿真條件下設(shè)定當(dāng)|a|<0.1時(shí),車速與上一秒車速相等,即汽車勻速行駛。
2.2 道路坡度預(yù)測(cè)
2.2.1 基于卡爾曼濾波器的坡度估計(jì)
對(duì)于本文,汽車行駛時(shí)的各項(xiàng)參數(shù)均被離散化,而離散卡爾曼濾波則以遞歸的方法解決離散數(shù)據(jù)的線性濾波問(wèn)題,可對(duì)離散時(shí)間控制的過(guò)程進(jìn)行估算。因此,應(yīng)用離散卡爾曼濾波器對(duì)實(shí)時(shí)變化的道路坡度進(jìn)行估算。
由汽車的驅(qū)動(dòng)力平衡方程可得:

式中,v為車速;δ為旋轉(zhuǎn)質(zhì)量系數(shù);m為質(zhì)量;Ttq為發(fā)動(dòng)機(jī)轉(zhuǎn)矩;ig為變速器各擋傳動(dòng)比;i0為主減速器傳動(dòng)比;ηt為傳動(dòng)系效率;r為車輪滾動(dòng)半徑;CD為空氣阻力系數(shù);A為迎風(fēng)面積;f為滾動(dòng)阻力系數(shù);G為重力系數(shù);α為路面坡度。
因此,k時(shí)刻的速度可以用(k-1)時(shí)刻的速度及其加速度進(jìn)行估計(jì):
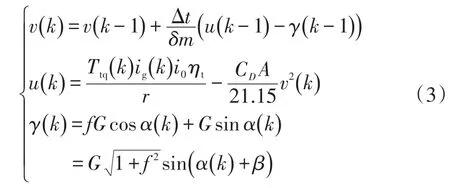
式中,Δt為采樣時(shí)間間隔;β=arctanf為等效道路坡度。
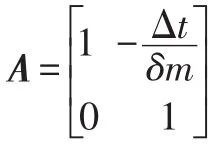
將u(k)作為輸入量,車速作為觀測(cè)量,狀態(tài)變量為:

于是,汽車縱向動(dòng)力學(xué)方程的卡爾曼濾波形式為:

系統(tǒng)的觀測(cè)方程為:

系統(tǒng)開(kāi)始計(jì)算時(shí),給定車速、坡度的初始值以及過(guò)程噪聲協(xié)方差矩陣Q和觀測(cè)噪聲協(xié)方差矩陣R,卡爾曼濾波器就可以根據(jù)圖2進(jìn)行計(jì)算(其中-表示先驗(yàn),^表示估計(jì)),不斷估計(jì)實(shí)時(shí)道路坡度。
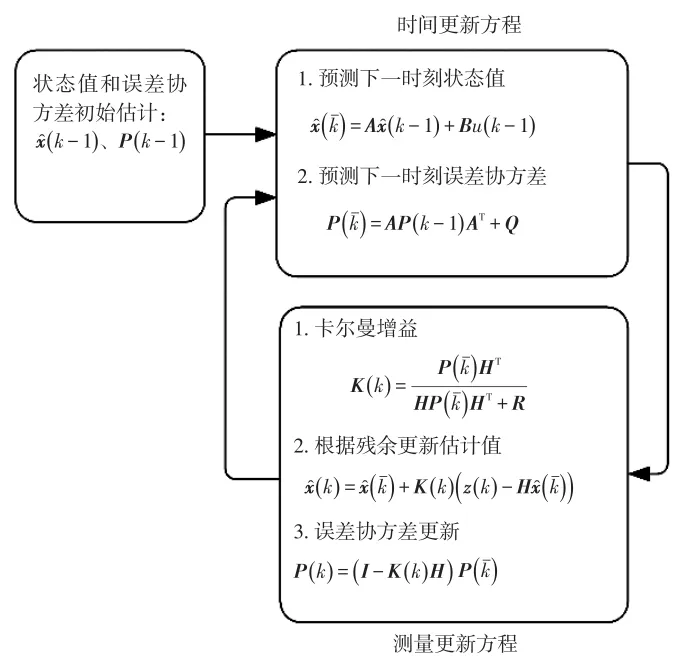
圖2 卡爾曼濾波算法流程
2.2.2 道路坡度線性擬合
道路本身具有線性特性,某一時(shí)間段內(nèi)的道路可以以線性函數(shù)y=f(x)表達(dá)。因此,在已識(shí)別出當(dāng)前道路坡度的情況下,可以通過(guò)擬合道路坡度隨時(shí)間的函數(shù)來(lái)預(yù)測(cè)道路坡度。如圖3所示,M、P為某次道路坡度擬合函數(shù)上的2個(gè)點(diǎn),l、t分別為函數(shù)曲線經(jīng)過(guò)M點(diǎn)、P點(diǎn)的切線,φ、y分別為曲線在M點(diǎn)、P點(diǎn)的斜率,RM、RP分別為曲線在M點(diǎn)、P點(diǎn)的曲率半徑,N、Q分別為坡度變化前、后路段上的點(diǎn)。可以看出:N點(diǎn)之前與Q點(diǎn)之后的道路坡度沒(méi)有發(fā)生變化,其曲率半徑為無(wú)窮大,所以將此路段看作直線并用一次函數(shù)擬合;過(guò)渡段M、P的曲率半徑先減小后增大,可將NQ段看作開(kāi)口向上的拋物線,即用二次函數(shù)對(duì)其進(jìn)行擬合。于是,將道路坡度的預(yù)測(cè)轉(zhuǎn)為對(duì)路面曲率半徑變化的計(jì)算問(wèn)題,即當(dāng)?shù)缆菲露葘⒁a(chǎn)生變化時(shí),路面擬合函數(shù)的曲率半徑會(huì)明顯降低。
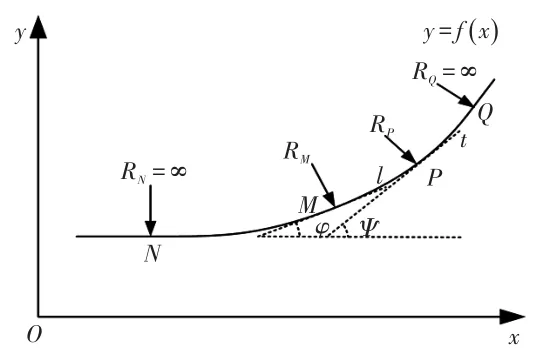
圖3 道路坡度函數(shù)曲率變化示意
函數(shù)上某點(diǎn)的曲率和曲率半徑為:
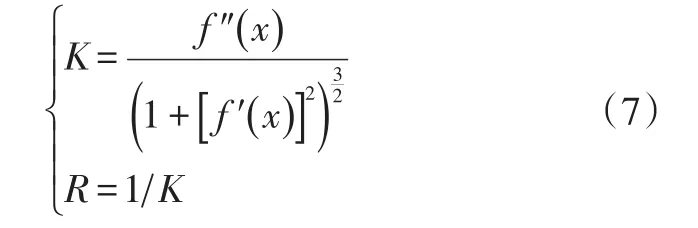
當(dāng)R=∞時(shí),曲線為直線;R>0時(shí),曲線為凸曲線;R<0時(shí),曲線為凹曲線。
3 基于道路工況預(yù)測(cè)的A-ECMS
混合動(dòng)力汽車能量管理策略的實(shí)質(zhì)是根據(jù)汽車實(shí)時(shí)運(yùn)行狀態(tài)將轉(zhuǎn)矩合理分配給發(fā)動(dòng)機(jī)和電機(jī),在滿足汽車動(dòng)力性以及維持SOC軌跡的前提下獲得最佳燃油經(jīng)濟(jì)性。本文通過(guò)未來(lái)短期道路工況預(yù)測(cè),對(duì)工況進(jìn)行預(yù)判并以此實(shí)時(shí)調(diào)整等效因子,以提高燃油經(jīng)濟(jì)性。
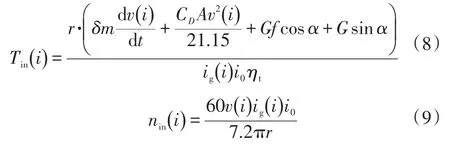
未來(lái)短期各時(shí)刻的變速器輸入軸轉(zhuǎn)矩Tin(i)和轉(zhuǎn)速nin(i)分別為:
各時(shí)刻的需求轉(zhuǎn)矩確認(rèn)后,等步長(zhǎng)地將等效因子λ取值范圍[λmin,λmax]劃分為S步,同樣地將電機(jī)的轉(zhuǎn)矩取值范圍[Tm,min(nm),Tm,max(nm)]劃分成j步,計(jì)算每一步長(zhǎng)發(fā)動(dòng)機(jī)分配到的轉(zhuǎn)矩:

式中,Te為發(fā)動(dòng)機(jī)轉(zhuǎn)矩;Tm為電機(jī)轉(zhuǎn)矩。
每步長(zhǎng)對(duì)應(yīng)的電機(jī)輸入功率為:
式中,ηm為電機(jī)效率;nm為電機(jī)轉(zhuǎn)速。
每步長(zhǎng)對(duì)應(yīng)的電池電流為:

式中,Rbatt為內(nèi)阻;Voc為開(kāi)路電壓。
每步長(zhǎng)對(duì)應(yīng)的電池功率為:

每步長(zhǎng)對(duì)應(yīng)的發(fā)動(dòng)機(jī)油耗e(j)由發(fā)動(dòng)機(jī)轉(zhuǎn)矩Te(j)和轉(zhuǎn)速ne(i)共同決定,可由發(fā)動(dòng)機(jī)MAP圖通過(guò)插值求得:

每一步長(zhǎng)對(duì)應(yīng)的等效油耗為:

求得某一等效因子下每一時(shí)刻最小等效油耗為:

故該等效因子下最小等效油耗對(duì)應(yīng)的SOC變化量ΔSOC為:

式中,Qb為蓄電池最大容量。
再將每步長(zhǎng)等效因子對(duì)應(yīng)的最小等效油耗進(jìn)行排序:Hmin,Hm,Hn,…,Hmax。
接下來(lái)判斷Hmin對(duì)應(yīng)的ΔSOC是否在允許的控制范圍內(nèi),如果超過(guò)控制范圍,重新選擇最接近Hmin的Hm判斷對(duì)應(yīng)的ΔSOC,以此類推,直到ΔSOC的范圍在允許的控制范圍內(nèi)為止,此時(shí)的等效因子值即為所求的λ*。
最后將所求最優(yōu)等效因子λ*作用于當(dāng)前時(shí)刻,并以等效油耗最小為目標(biāo)重新進(jìn)行最優(yōu)轉(zhuǎn)矩分配,最終得到最佳的分配轉(zhuǎn)矩u*。此時(shí)所得結(jié)果即為A-ECMS在SOC、等效因子以及轉(zhuǎn)矩分配都達(dá)到最優(yōu)時(shí)的控制參數(shù),哈密頓函數(shù)H(SOC*,λ*,u*,t)此時(shí)達(dá)到最優(yōu)值。
4 仿真分析
為驗(yàn)證改進(jìn)后灰色預(yù)測(cè)GM(1,1)模型預(yù)測(cè)的準(zhǔn)確性,在VAIL2NREL工況下進(jìn)行仿真驗(yàn)證,結(jié)果如圖4所示。經(jīng)過(guò)仿真計(jì)算,該工況下預(yù)測(cè)未來(lái)10 s車速的平均絕對(duì)誤差為1.158 5 km/h,在整個(gè)工況下,該精度可以接受,說(shuō)明該改進(jìn)型灰色預(yù)測(cè)應(yīng)用于速度預(yù)測(cè)是可行的。
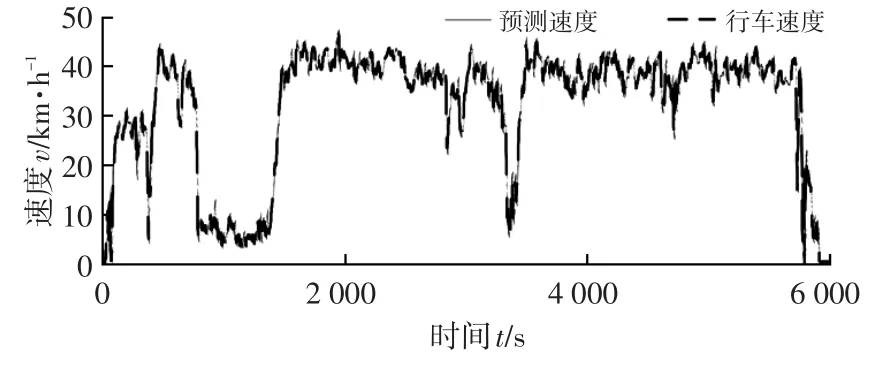
圖4 VAIL2NREL工況下預(yù)測(cè)速度與實(shí)際速度的對(duì)比
圖5所示為某道路模型的預(yù)測(cè)結(jié)果。可以看出,在整個(gè)工況條件下短期預(yù)測(cè)的結(jié)果與卡爾曼濾波估算結(jié)果跟隨性較好。經(jīng)計(jì)算,預(yù)測(cè)的平均誤差為0.056 7°,證明了本文所用坡度預(yù)測(cè)方法的可行性。
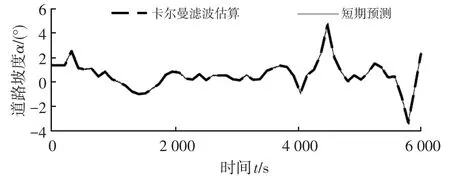
圖5 道路模型坡度預(yù)測(cè)結(jié)果
在VAIL2NREL工況下進(jìn)行性能仿真分析,結(jié)果如圖6所示。SOC的波動(dòng)范圍為-0.025~0.065,終值與初始值相差0.062,軌跡整體保持穩(wěn)定;電機(jī)充電時(shí)轉(zhuǎn)矩較大,而驅(qū)動(dòng)時(shí)轉(zhuǎn)矩不高,發(fā)動(dòng)機(jī)整體工作轉(zhuǎn)矩較大。
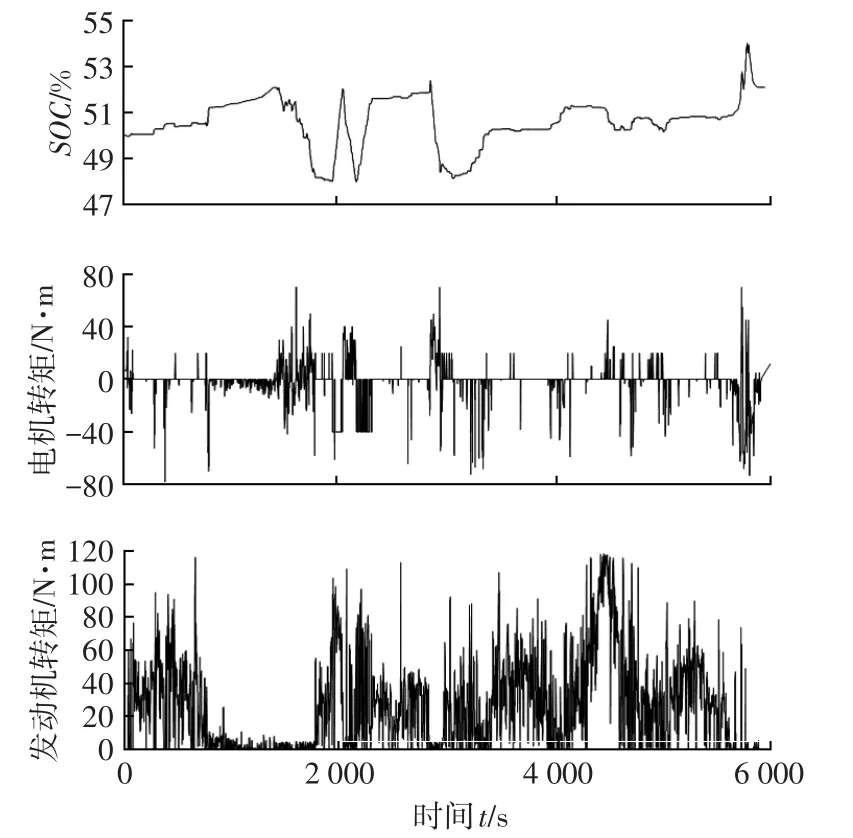
圖6 VAIL2NREL工況下仿真結(jié)果
圖7所示為兩種A-ECMS在VAIL2NREL工況下SOC仿真結(jié)果以及對(duì)應(yīng)時(shí)間點(diǎn)的道路坡度情況。可以明顯看出,基于SOC反饋的A-EMCS在整個(gè)工況下SOC的波動(dòng)頻率比較明顯,而基于道路工況預(yù)測(cè)的A-ECMS在整個(gè)工況下SOC軌跡保持依然較好,同時(shí)沒(méi)有頻繁波動(dòng),更沒(méi)有明顯的通過(guò)改變等效因子調(diào)整SOC軌跡的現(xiàn)象,因?yàn)榇丝刂撇呗缘膬?yōu)化目標(biāo)是所預(yù)測(cè)未來(lái)短期道路工況下SOC、等效因子、燃油消耗量以及需求轉(zhuǎn)矩分配共同決定的最優(yōu)哈密頓函數(shù)。
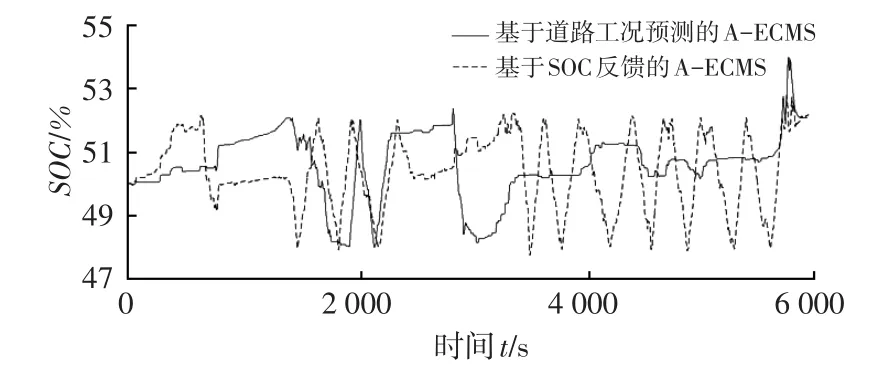
圖7 VAIL2NREL工況下兩種A-ECMS SOC控制結(jié)果對(duì)比
圖8所示為兩種A-ECMS在VAIL2NREL工況下電機(jī)轉(zhuǎn)矩及對(duì)應(yīng)轉(zhuǎn)速點(diǎn)的電機(jī)效率分布情況,可以明顯看出,基于SOC反饋的A-ECMS電機(jī)運(yùn)行在高轉(zhuǎn)矩的點(diǎn)數(shù)更多,而基于道路工況預(yù)測(cè)的A-ECMS轉(zhuǎn)矩相對(duì)較低,但電機(jī)效率分布相差不大,說(shuō)明控制策略在降低電機(jī)工作轉(zhuǎn)矩的情況下,并沒(méi)有降低效率。
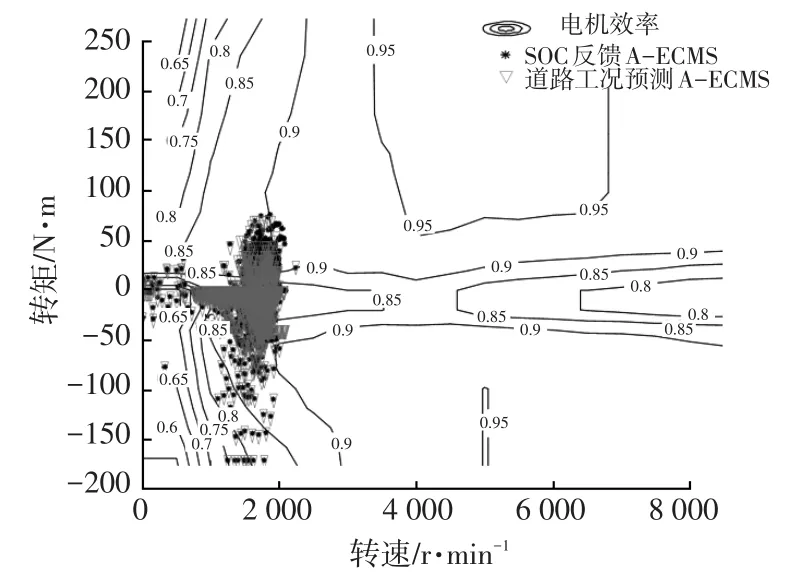
圖8 VAIL2NREL工況下兩種A-ECMS電機(jī)轉(zhuǎn)矩分布
圖9所示為兩種A-ECMS在VAIL2NREL工況下發(fā)動(dòng)機(jī)轉(zhuǎn)矩及對(duì)應(yīng)轉(zhuǎn)速點(diǎn)的燃油消耗率分布情況,可以看出相比于基于SOC反饋的A-ECMS,基于道路工況預(yù)測(cè)的A-ECMS發(fā)動(dòng)機(jī)工作點(diǎn)更多集中在低燃油消耗率的區(qū)域,油耗降低效果明顯。
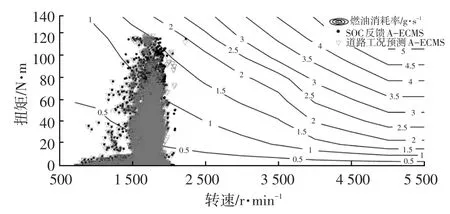
圖9 VAIL2NREL工況下兩種A-ECMS發(fā)動(dòng)機(jī)扭矩分布
基于SOC反饋的A-ECMS的百公里燃油消耗量為4.294 L,基于道路工況預(yù)測(cè)的A-ECMS的百公里燃油消耗量為4.013 L,后者較前者相對(duì)降低了6.54%。
5 硬件在環(huán)仿真驗(yàn)證
為驗(yàn)證控制策略的實(shí)時(shí)性和穩(wěn)定性,搭建硬件在環(huán)(Hardware In Loop,HIL)仿真驗(yàn)證平臺(tái),如圖10所示。在Simulink中建立混合動(dòng)力汽車整車模型,提取出控制策略,添加輸入、輸出驅(qū)動(dòng)模塊以及CAN通信配置模塊,接收整車模型各部件的控制信號(hào),同時(shí)輸出車速信號(hào)、油門踏板信號(hào)和制動(dòng)踏板信號(hào)等。將整車模型進(jìn)行編譯生成C代碼,自動(dòng)下載至AutoBox中。
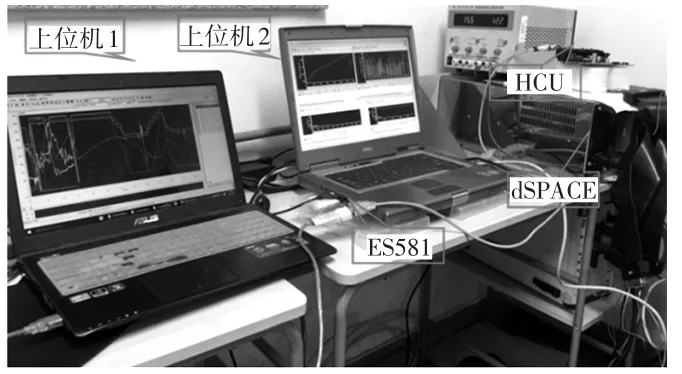
圖10 硬件在環(huán)實(shí)物圖
采用Freescale公司的MPC5634M作為主控芯片,dSPACE標(biāo)準(zhǔn)組件系統(tǒng)采用DS1005PPC處理器板,其使用的是Freescale的POWER體系的PC750GX處理器,處理頻速933 MHz。CAN通信模塊總線驅(qū)動(dòng)器采用博世公司CF160CAN驅(qū)動(dòng)芯片,通信格式為標(biāo)準(zhǔn)幀格式,波特率為250 kb/s,報(bào)文協(xié)議為J1939協(xié)議。整車控制器以10 ms的中斷周期實(shí)時(shí)進(jìn)行AD信號(hào)采集、控制策略的運(yùn)行以及CAN信號(hào)發(fā)送。
采用與離線仿真相同的VAIL2NREL工況,如圖11所示,控制器分配轉(zhuǎn)矩與目標(biāo)需求轉(zhuǎn)矩趨于一致,說(shuō)明提出的控制策略具有較好的實(shí)時(shí)性和穩(wěn)定性。但從局部放大圖來(lái)看,分配轉(zhuǎn)矩曲線滯后約35 ms,這是整車控制器運(yùn)行控制策略消耗時(shí)間造成的,而人體對(duì)外界刺激的感知時(shí)間為100 ms左右,因而駕駛員不會(huì)有“加速疲軟”的感覺(jué)。另外,由于“時(shí)滯”效應(yīng),HIL仿真百公里燃油消耗量為4.108 L,相比于離線仿真增加了2.37%。
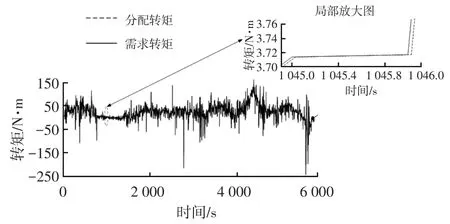
圖11 需求轉(zhuǎn)矩與分配轉(zhuǎn)矩對(duì)比
SOC控制結(jié)果和功率分配的仿真結(jié)果如圖12、圖13所示,顯然,HIL仿真與離線仿真的結(jié)果趨于一致,也驗(yàn)證了該策略的有效性。
6 結(jié)束語(yǔ)
為提高傳統(tǒng)A-ECMS在坡度工況下的適應(yīng)性,在車速預(yù)測(cè)的同時(shí)對(duì)道路坡度進(jìn)行預(yù)測(cè)。根據(jù)道路坡度的線性特性,提出了基于卡爾曼濾波估算坡度的線性擬合預(yù)測(cè)方法,并將預(yù)測(cè)的車速與道路坡度用于實(shí)時(shí)調(diào)整等效因子,建立基于道路工況預(yù)測(cè)的A-ECMS策略。結(jié)果表明,該坡度預(yù)測(cè)方法結(jié)果較為準(zhǔn)確,且以此為基礎(chǔ)的A-ECMS相比于基于SOC反饋的A-ECMS,SOC軌跡的波動(dòng)明顯減少,同時(shí)燃油經(jīng)濟(jì)性也提高了6.54%。通過(guò)硬件在環(huán)仿真驗(yàn)證了該控制策略的實(shí)時(shí)性和穩(wěn)定性,說(shuō)明該控制策略應(yīng)用于實(shí)車是可行的。
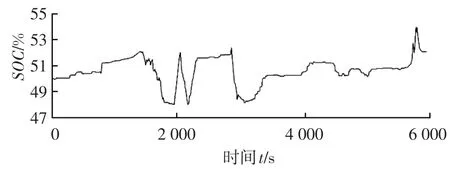
圖12 硬件在環(huán)SOC仿真結(jié)果
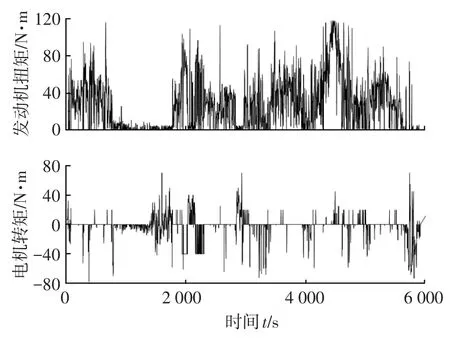
圖13 硬件在環(huán)仿真轉(zhuǎn)矩分配
猜你喜歡
測(cè)控技術(shù)(2018年11期)2018-12-07 05:49:38
測(cè)控技術(shù)(2018年12期)2018-11-25 09:37:34
電測(cè)與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
中國(guó)慣性技術(shù)學(xué)報(bào)(2017年1期)2017-06-09 08:15:14
電測(cè)與儀表(2016年21期)2016-04-11 12:42:44
電源技術(shù)(2016年9期)2016-02-27 09:05:39
江蘇科技大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年4期)2015-12-17 12:42:50
電源技術(shù)(2015年1期)2015-08-22 11:16:28
電測(cè)與儀表(2015年24期)2015-04-09 12:04:36
