一種星敏感器安裝誤差自動化測量方法
2019-07-10 07:44:01陳偉雄王林鄭濤馬步川
中國測試 2019年2期
陳偉雄 王林 鄭濤 馬步川
摘要:針星敏感器安裝誤差的精確標(biāo)定,該文提出基于平臺式慣性/星光組合導(dǎo)航系統(tǒng)中,星敏感器相對慣性坐標(biāo)基準(zhǔn)的安裝誤差自動化測量方法。首先基于光電自準(zhǔn)直儀測量方式,建立安裝誤差測量的數(shù)學(xué)模型,并通過仿真驗(yàn)證模型的有效性。開發(fā)一套自動化測試系統(tǒng),利用高精度的光電測角儀模擬星光,將星敏感器主光軸對準(zhǔn)星點(diǎn),輸出星點(diǎn)坐標(biāo)信息,自準(zhǔn)直儀測量標(biāo)準(zhǔn)六面體的姿態(tài),通過與星敏感器坐標(biāo)對比和軟件自動解算得到星敏感器相對標(biāo)準(zhǔn)六面體的安裝誤差。試驗(yàn)數(shù)據(jù)能達(dá)到5′′內(nèi)的測試穩(wěn)定精度,證明該方法可準(zhǔn)確測量出星敏感器的安裝誤差,且測試穩(wěn)定性好,已應(yīng)用于工程精密測量。
關(guān)鍵詞:慣性/星光組合導(dǎo)航系統(tǒng);星敏感器;安裝誤差標(biāo)定;光電自動化測量
中圖分類號:V448.22
文獻(xiàn)標(biāo)志碼:A
文章編號:1674–5124(2019)02–0111–05
0 引言
在慣性/星光組合導(dǎo)航系統(tǒng)中,星敏感器作為重要測量單元,其測量恒星姿態(tài)的精度可達(dá)角秒級,但因當(dāng)前星敏感器安裝誤差的測試方法誤差較大,導(dǎo)致安裝誤差的測量結(jié)果可達(dá)角分級。據(jù)此帶來的測量誤差遠(yuǎn)高于星敏感器自身的隨機(jī)測量誤差,嚴(yán)重影響星敏感器的測量信息[1]。
在平臺式慣性/星光組合導(dǎo)航系統(tǒng)中,星敏感器以標(biāo)準(zhǔn)六面體為基準(zhǔn)安裝在慣性系統(tǒng)中,基于慣性測量坐標(biāo)系,依靠慣性系統(tǒng)使光軸視線穩(wěn)定在慣性空間[2]。目前主要通過三坐標(biāo)機(jī)或自準(zhǔn)直儀測量星敏感器自帶六面體和標(biāo)準(zhǔn)六面體之間的相對位置表示星敏感器安裝誤差[3],但測試結(jié)果誤差較大,原因有:1)星敏感器自帶六面體受表面加工工藝限制,精度較低;同時六面體安裝不穩(wěn)定,在長期測試過程中因應(yīng)力釋放易產(chǎn)生精度漂移,測試數(shù)據(jù)穩(wěn)定性較差;2)兩種六面體的位置測量,需使用高精度平面鏡作位置基準(zhǔn),存在基準(zhǔn)傳遞過程,且平面鏡誤差不可測,會引入系統(tǒng)誤差;3)所使用的自準(zhǔn)直儀為目視式,需通過人眼瞄準(zhǔn),不同人員測試結(jié)果存在明顯差異,且儀器分辨率約在10′′左右[4],精度較低。
由于上述測試方法受六面體表面加工精度、六面體裝配精度、儀器調(diào)平精度、基準(zhǔn)傳遞以及人工操作不確定性等因素的影響,測試結(jié)果會產(chǎn)生20′′~50′′的誤差,使星敏感器測量精度降低。因此,需要開展高精度的安裝誤差測試方法研究。
1 星敏感器安裝誤差坐標(biāo)涵義
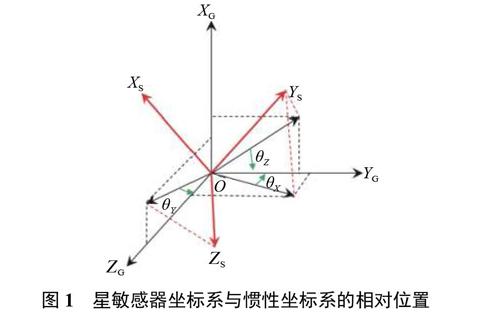
平臺式慣性/星光組合導(dǎo)航系統(tǒng)使用星敏感器實(shí)現(xiàn)慣性+天文復(fù)合導(dǎo)航[5],星敏感器以主光軸上仰8°的方式安裝在慣性系統(tǒng)中,安裝精度要求高。慣性坐標(biāo)基準(zhǔn)XGYGZG(由標(biāo)準(zhǔn)六面體確定)和星敏感器坐標(biāo)基準(zhǔn)XSYSZS(星敏感器的主光軸為YS軸)的相對位置如圖1所示。
星敏感器安裝誤差直接影響復(fù)合導(dǎo)航的精度,其中θX、θZ將1∶1影響天文方位修正角,而θY值的影響是該誤差的余弦乘以星敏感器的輸出。以上誤差屬于系統(tǒng)誤差,可在方位計(jì)算時予以修正,以保證導(dǎo)航系統(tǒng)的制導(dǎo)精度[6]。
2 誤差模型創(chuàng)建
慣性/星光組合導(dǎo)航系統(tǒng)建立的慣性坐標(biāo)系是以標(biāo)準(zhǔn)六面體(表面精度可達(dá)3′′)為基準(zhǔn),星敏感器的安裝誤差也是相對標(biāo)準(zhǔn)六面體而言。因此,在測量安裝誤差時,要對星敏感器和標(biāo)準(zhǔn)六面體的相對位置進(jìn)行測量。
本文采用光電自準(zhǔn)直儀進(jìn)行自動測量。但在實(shí)際測量過程中,當(dāng)被測目標(biāo)處于不同的擺放位置時,光電自準(zhǔn)直儀測量各個方向上的角度偏差也會具有不同的誤差計(jì)算方法[7]。
2.1 基于不水平度的角度偏差模型
由于星敏感器以主光軸上仰8°的方式安裝在慣性系統(tǒng)中,若標(biāo)準(zhǔn)六面體在水平方向上的安裝存在一定偏差,測試結(jié)果會因存在仰角而產(chǎn)生測量誤差[8],因此需要對標(biāo)準(zhǔn)六面體的不水平度進(jìn)行測量和校準(zhǔn)。
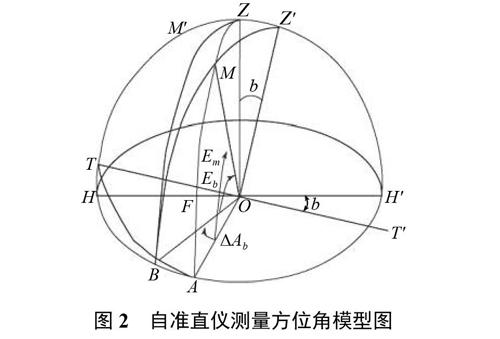
現(xiàn)針對不水平度產(chǎn)生的測量誤差建立數(shù)學(xué)模型。如圖2所示,圖中M為目標(biāo),OZ為垂直軸,HH'為理想水平軸,TT'為實(shí)際水平軸,OA為對準(zhǔn)軸。
若水平軸不存在傾斜情況,水平軸HH′應(yīng)平行于水平面,對準(zhǔn)軸連結(jié)形成的經(jīng)過目標(biāo)M的曲線弧為AZ,且大圓弧面AZO垂直于水平軸HH′;若水平軸在水平面上存在傾斜情況時,水平軸由HH′變?yōu)門T′,此時在面HZH′內(nèi)作OZ′與TT′相互垂直,對準(zhǔn)軸連接形成的經(jīng)過目標(biāo)M的曲線弧為BZ′。定義水平軸線的不水平誤差為∠TOH′=∠ZOZ′=b,那么∠AOB就成為水平軸存在傾斜情況時造成的方位偏差,記作?Ab,若水平軸不存在傾斜情況時目標(biāo)M的俯仰
角為∠AOM,記作∠AOM=Em;若水平軸存在傾斜情況時目標(biāo)M的俯仰角為∠BOM,記作∠BOM=Eb。
在球面三角形ZBM中,按照球面余切定理可得:
因?yàn)椤螧OZ=90°,∠MOZ=90°-Em,∠ZBM≈b,∠AOB=∠BZM=?Ab,則:
一般情況下b、?Ab的值很小,將式(3)按照泰勒級數(shù)展開,并取一階近似得:
式(4)表明,水平軸的不水平度偏差影響方位測角的精度偏差值與被測目標(biāo)俯仰角的正切成線性關(guān)系,若俯仰角越大,方位角的角度偏差值就越大[9]。
2.2 斜置狀態(tài)下的方位偏差模型
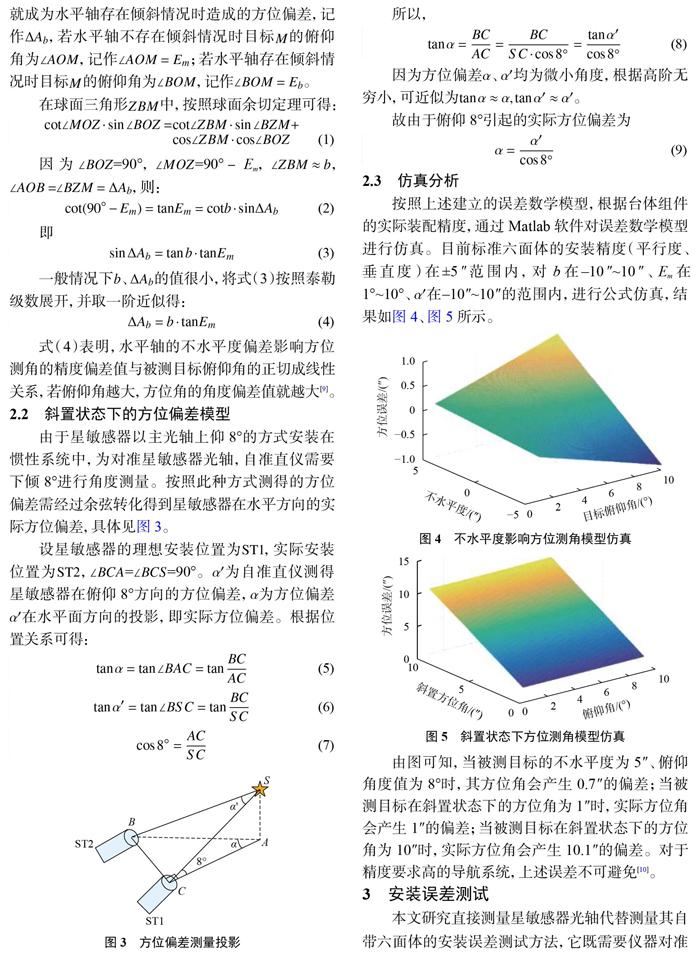
由于星敏感器以主光軸上仰8°的方式安裝在慣性系統(tǒng)中,為對準(zhǔn)星敏感器光軸,自準(zhǔn)直儀需要下傾8°進(jìn)行角度測量。按照此種方式測得的方位偏差需經(jīng)過余弦轉(zhuǎn)化得到星敏感器在水平方向的實(shí)際方位偏差,具體見圖3。
設(shè)星敏感器的理想安裝位置為ST1,實(shí)際安裝位置為ST2,∠BCA=∠BCS=90°。α′為自準(zhǔn)直儀測得星敏感器在俯仰8°方向的方位偏差,α為方位偏差α′在水平面方向的投影,即實(shí)際方位偏差。根據(jù)位置關(guān)系可得:
所以,
′·
因?yàn)榉轿黄瞀痢ⅵ辆鶠槲⑿〗嵌龋鶕?jù)高階無窮小,可近似為tanα≈α,tanα′≈α′。故由于俯仰8°引起的實(shí)際方位偏差為
2.3 仿真分析
按照上述建立的誤差數(shù)學(xué)模型,根據(jù)臺體組件的實(shí)際裝配精度,通過Matlab軟件對誤差數(shù)學(xué)模型進(jìn)行仿真。目前標(biāo)準(zhǔn)六面體的安裝精度(平行度、垂直度)在±5′′范圍內(nèi),對b在–10′′~10′′、Em在1°~10°、α′在–10′′~10′′的范圍內(nèi),進(jìn)行公式仿真,結(jié)果如圖4、圖5所示。
由圖可知,當(dāng)被測目標(biāo)的不水平度為5′′、俯仰角度值為8°時,其方位角會產(chǎn)生0.7′′的偏差;當(dāng)被測目標(biāo)在斜置狀態(tài)下的方位角為1′′時,實(shí)際方位角會產(chǎn)生1′′的偏差;當(dāng)被測目標(biāo)在斜置狀態(tài)下的方位角為10′′時,實(shí)際方位角會產(chǎn)生10.1′′的偏差。對于精度要求高的導(dǎo)航系統(tǒng),上述誤差不可避免[10]。
3 安裝誤差測試
本文研究直接測量星敏感器光軸代替測量其自帶六面體的安裝誤差測試方法,它既需要儀器對準(zhǔn)星敏感器光軸進(jìn)行測量,還能模擬星點(diǎn)坐標(biāo)。因此,采用集自準(zhǔn)直/星模擬器功能于一體的光電測角儀,同時由于星敏感器特殊的安裝方式,測試過程中光電測角儀的光軸需要水平向下傾斜8°安裝。因?yàn)檠b配過程不涉及星敏感器滾動方向的安裝誤差[11],所以只針對星敏感器繞方位、俯仰軸方向的安裝誤差測量方法開展研究。
3.1 測試原理
測試時以標(biāo)準(zhǔn)體為基準(zhǔn),如圖6所示,AX代表光電測角儀,A1、A2代表光電自準(zhǔn)直儀。光電自準(zhǔn)直儀、光電測角儀對標(biāo)準(zhǔn)體建立初始零位姿態(tài)后,再分別對準(zhǔn)臺體上的標(biāo)準(zhǔn)六面體、星敏感器,根據(jù)測試結(jié)果的差值和星敏感器的輸出,就可以得到星敏感器坐標(biāo)系S在標(biāo)準(zhǔn)六面體坐標(biāo)系OTXTYTZT下表達(dá)式S|T的數(shù)學(xué)模型。
3.2 測試方法
完成設(shè)備的粗校準(zhǔn)后,開始進(jìn)行測試。標(biāo)準(zhǔn)體上的基準(zhǔn)平面鏡、基準(zhǔn)六面體與星敏感器光軸、臺體的標(biāo)準(zhǔn)六面體空間位置保持一致。測試光路結(jié)構(gòu)如圖7所示,測量時,首先將光電自準(zhǔn)直儀、光電測角儀分別對準(zhǔn)標(biāo)準(zhǔn)體上相對應(yīng)的反光面,標(biāo)定其相對標(biāo)準(zhǔn)體的姿態(tài),完成校零操作。然后將標(biāo)準(zhǔn)體移出,將被測臺體移入,光電自準(zhǔn)直儀對準(zhǔn)標(biāo)準(zhǔn)六面體:1#、2#光電自準(zhǔn)直儀測量標(biāo)準(zhǔn)六面體X面、Z面的姿態(tài);光電測角儀發(fā)出與其測量光軸同軸的模擬星光,星敏感器對準(zhǔn)模擬星光后測量它相對光電測角儀的姿態(tài),完成測量操作。
3.3 結(jié)果計(jì)算
根據(jù)校零與測量操作中1#、2#光電自準(zhǔn)直儀、
光電測角儀、星敏感器的輸出,基于2.1、2.2中建立的誤差模型,按照下式可解算出星敏感器相對標(biāo)準(zhǔn)六面體的方位偏差θY和俯仰偏差θZ:
式中:GH0、GH——光電測角儀方位方向的零位值、測量值;
GV0、GV——光電測角儀俯仰方向的零位值、測量值;
Z1H0、Z1H——1#自準(zhǔn)直儀方位方向的零位值、測量值;
Z1V0、Z1V——1#自準(zhǔn)直儀俯仰方向的零位值、測量值;
Z20、Z2——2#自準(zhǔn)直儀俯仰方向的零位值、測量值;
XY0、XZ0——星敏感器坐標(biāo)值;
θY0、θZ0——標(biāo)準(zhǔn)體零位。
θZ的計(jì)算中增加上仰8°的安裝補(bǔ)償。
4 試驗(yàn)數(shù)據(jù)
針對儀器測量的數(shù)據(jù),利用LabVIEW開發(fā)測試軟件對硬件系統(tǒng)進(jìn)行數(shù)據(jù)采集,經(jīng)過濾波處理后計(jì)算結(jié)果,并將結(jié)果顯示在計(jì)算機(jī)界面上,實(shí)現(xiàn)安裝誤差的自動解算,軟件界面如圖8所示。
按照3.2中的測試方法,對7套臺體的星敏感器安裝誤差進(jìn)行重復(fù)測試,以驗(yàn)證系統(tǒng)的測試精度,選取結(jié)果如表1所示。從表中數(shù)據(jù)可以看出,θY、θZ的測量結(jié)果極差最大分別只有3.56"和3.59"。為充分驗(yàn)證該方法所測數(shù)據(jù)的有效性,對其中某一臺體組件進(jìn)行一個月的長期穩(wěn)定性測試,具體結(jié)果見圖9。
從圖中可以看出,前期測試數(shù)據(jù)變化稍大,這是由于星敏感器在測試初期,裝配應(yīng)力不穩(wěn)定;隨著長時間放置,其裝配應(yīng)力逐漸釋放[12],安裝誤差的測試結(jié)果也趨于穩(wěn)定,且變化幅度能穩(wěn)定在5”以內(nèi)。
5 結(jié)束語
該研究基于平臺式慣性/星光組合導(dǎo)航系統(tǒng),提出星敏感器安裝誤差的自動化測量方法,按照測量原理,設(shè)計(jì)光路系統(tǒng),并應(yīng)用LabVIEW開發(fā)測試軟件,對設(shè)備輸出信號、數(shù)據(jù)進(jìn)行采集和處理,實(shí)現(xiàn)安裝誤差的快速自動測試。經(jīng)過試驗(yàn)數(shù)據(jù)分析,證明該測試方法所測得的結(jié)果準(zhǔn)確、穩(wěn)定性好,能滿足工程測量需求。此外,星敏感器的測量也會受環(huán)境溫度等因素影響[13],后續(xù)將開展模型建立和誤差分析的研究工作,進(jìn)一步提高系統(tǒng)測量精度。
參考文獻(xiàn)
[1]王宏力,何貽洋,陸敬輝,等.星敏感器安裝誤差的三位置法
地面標(biāo)定方法[J].紅外與激光工程,2016,45(11):320-325.[2]王常虹,夏剛,孟倩.平臺式慣性/星光組合系統(tǒng)斜置對準(zhǔn)方
法[J].導(dǎo)彈與航天運(yùn)載技術(shù),2011(1):14-17.
[3]毛玉良,代潔,楊葉,等.單星模雙位置星慣組合安裝誤差標(biāo)定技術(shù)[C]//中國慣性技術(shù)學(xué)會第七屆學(xué)術(shù)年會論文集,2015.
[4]蘇力.光電自準(zhǔn)直小角度測量系統(tǒng)設(shè)計(jì)[D].西安:西安理工大學(xué),2007.
[5]譚漢清,劉壘.慣性/星光組合導(dǎo)航技術(shù)綜述[J].飛航導(dǎo)彈,2008(5):44-51.
[6]陳偉雄,王林,鄭濤,等.慣性平臺中星敏感器安裝誤差標(biāo)定方法研究[J].導(dǎo)航與控制,2017,16(5):71-75.
[7]陳穎,張學(xué)典,逯興蓮,等.自準(zhǔn)直儀的現(xiàn)狀與發(fā)展趨勢[J].光機(jī)電信息,2011,28(1):6-9.
[8]司高潞,馬步川,鄭濤,等.棱鏡組件安裝誤差自動化標(biāo)定方法研究[J].導(dǎo)航與控制,2016,15(5):100-103.
[9]田留德,劉朝暉,趙建科,等.三軸誤差對光電經(jīng)緯儀測角的影響[J].紅外與激光工程,2013,45(11):192-197.
[10]張輝,田宏,袁家虎,等.星敏感器參數(shù)標(biāo)定及誤差補(bǔ)償[J].光電工程,2005(9):1-4.
[11]王融,熊智,劉建業(yè),等.一種星敏感器安裝誤差標(biāo)定模型仿真研究[J].系統(tǒng)仿真技術(shù),2013,9(4):288-291.
[12]李留建,王明海,許立軍,等.單星方案確定平臺誤差角研究[J].彈箭與制導(dǎo)學(xué)報,2009,29(6):41-44.
[13]劉海波,譚吉春,郝云彩,等.環(huán)境溫度對星敏感器測量精度的影響[J].光電工程,2008,35(12):40-44.
