基于TGAM的意念控制無人機系統(tǒng)
2019-07-16 03:14:59張志遠陳珂李晶晶
電腦知識與技術 2019年15期
張志遠 陳珂 李晶晶

摘要:設計出了一款基于TGAM腦電傳感器的無人機控制系統(tǒng),通過對TGAM傳感器數(shù)據(jù)的提取、傳輸、濾波、特征提取等方式,將人腦的精神狀況轉(zhuǎn)化為可對系統(tǒng)進行操作是實用輸入信號,實現(xiàn)了對無人機油門和方向等基本操作的控制。該系統(tǒng)具有通用性,可擴展應用到各種無線控制領域。
關鍵詞:TGAM模塊;無人機控制;腦電波分析;信號處理;STM32
中圖分類號:TP311 ? ? ? ?文獻標識碼:A
文章編號:1009-3044(2019)15-0286-03
1 引言
腦機接口的研究最早起源于19世紀60年代,到21世紀,迎來了研究的熱潮。它是一種基于腦電信號實現(xiàn)人機交互的新型控制方式,可以簡化現(xiàn)有的控制系統(tǒng)。該技術,在醫(yī)療,游戲,教育以及通訊控制等多個領域都可以有重要的應用。
本項目中,利用美國神念科技有限公司推出的傳感TGAM,實時檢測大腦前額發(fā)出的微弱的腦電波信號(電壓信號)。檢測對象的情緒狀況不同,發(fā)出的腦電波信號也會相應改變。利用該信號來控制無人機的起飛降落等基本動作,實現(xiàn)了比較好的調(diào)控效果。
2 系統(tǒng)的基本構成
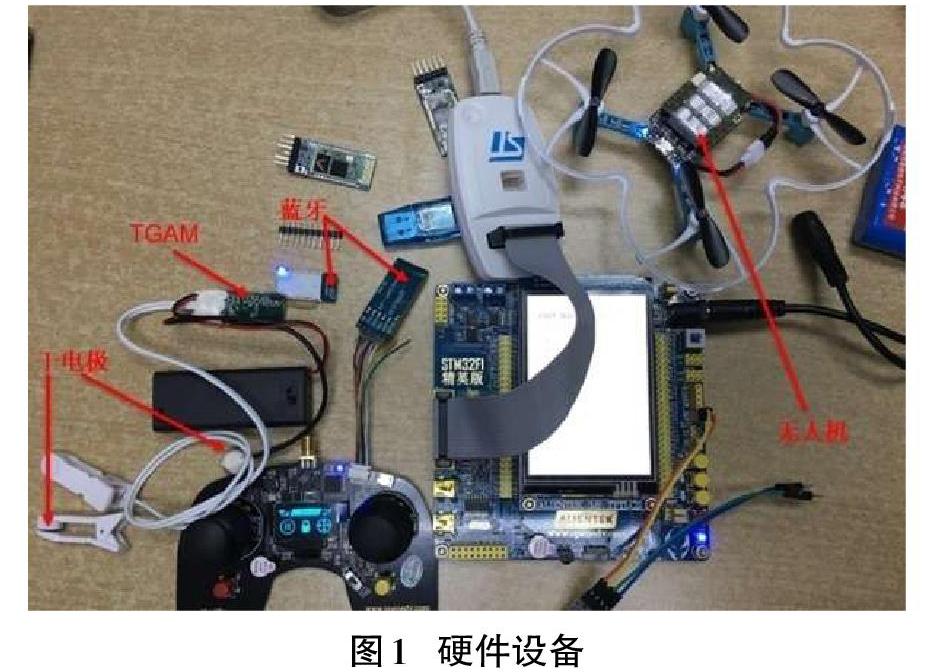
整個系統(tǒng)由干電極、TGAM模塊、藍牙、基于STM32的飛行控制器、基于NRF24L01 +的無線通信電路、基于NRF51822的無線通信模塊,基于STM32的無人機系統(tǒng)等部分組成。本系統(tǒng)針對無人機控制系統(tǒng)結構中飛行控制器這一設備不易操作的特點,初步開發(fā)了一款集腦電波信號發(fā)送、接收、信號處理及無人機控制的系統(tǒng)。考慮到藍牙設備的發(fā)送距離有限,因此借用了原有飛行控制器的無線收發(fā)模塊進行遠距離信號傳輸。其系統(tǒng)框圖1所示,利TGAM采集大腦前額腦電波電壓信號,經(jīng)藍牙HC-05傳輸?shù)斤w行控制器上的藍牙HC-06,經(jīng)過飛行控制器的NRF24L01 +的無線通信電路,將信號傳輸?shù)綗o人機上的NRF51822,至此信號傳輸完畢。再由無人機上的STM32F103對原始電壓信號進行數(shù)據(jù)處理,利用處理完的數(shù)據(jù)對無人機進行控制,實現(xiàn)了人腦對無人機的無線控制。
3 控制系統(tǒng)軟硬件設計
TGAM芯片必須將干電極貼近在大腦前額處,兩個參考電極放置在左耳乳突出和右耳乳突出,才能構成電勢差,并通過計算參考電勢來消除一定的干擾。在不連接參考電極時進行腦電采集,電壓信號變化劇烈以致芯片無法處理信號。通過設置雙面電極耳夾,整體體積小巧,調(diào)整和操作極為方便,可以基本達到要求。
信號的傳輸選用兩個藍牙模塊,考慮道飛行器與人相距較遠,而利用了飛行控制器上的NRF24L01 +發(fā)送模塊,和無人機上的NRF51822無線接收模塊。從而將TGAM數(shù)據(jù)包傳輸?shù)斤w行器的STM32F103芯片上。
圖1即是該系統(tǒng)的主要設備。
STM32可以對原始數(shù)據(jù)進行歸一化處理和濾波處理,將其轉(zhuǎn)化成飛行器的控制的輸入信號。飛行器通過pwm輸出,經(jīng)多層pid反饋計算來實現(xiàn)準確控制各路電機的轉(zhuǎn)速。本項目將輸入信號轉(zhuǎn)化成為pwm輸出信號,實現(xiàn)對飛行器高度的和方向的控制。
4 腦電波采集和處理
4.1 腦電波的采集
腦電模塊 TGAM 檢測出來的信號,是經(jīng)過電路放大處理的電壓信號。使用干電極讀取人的腦電信號,可以過濾掉周圍噪音的部分干擾,并將檢測到的大腦信號轉(zhuǎn)成數(shù)字信號。經(jīng)過TGAM芯片處理的輸出原始數(shù)據(jù)rawdata與前額皮膚電壓v滿足:[rawdata=2000×4096×V1.8]。TGAM大約每秒鐘發(fā)送 513個數(shù)據(jù)包,經(jīng)過對每個數(shù)據(jù)包的計算,校驗,對第513個數(shù)據(jù)包進行解析、分類處理,可以將繁雜的腦電波轉(zhuǎn)化為信號強度、放松度、專注度三個數(shù)值以及8個 EEG Power 的值。本項目只取其中的專注度和信號強度進行研究,專注度大小用 1 ~ 100 表示 , 數(shù)值越大表示進入集中程度越深。信號強度大小用1 ~ 200 表示 , 數(shù)值越小表示進入相應程度越深。未佩戴時,專注度信號為0,信號強度為200。圖2顯示了1分鐘內(nèi)測試對象在不同狀態(tài)下的腦波數(shù)據(jù)結果。
4.2 腦電波的解析
TGAM數(shù)據(jù)包是以異步的串行字節(jié)流發(fā)送的,可以經(jīng)過藍牙HC-05進行傳輸。TGAM發(fā)送的包有小包和大包兩種小包的格式是[AA AA 04 80 02 xxHigh xxLow xxCheckSum,]前面的[AA AA 04 80 02]是不變的,后三個字節(jié)是變化的,[xxHighxxLow]和組成了原始數(shù)據(jù)[rawdata],[xxCheckSum]就是校驗和。所以一個小包里面只包含了一個有用的數(shù)據(jù),那就是rawdata,大約每秒鐘會有512個原始數(shù)據(jù)。其中:
[rawdata = (xxHigh << 8) | xxLow? ? ? ? ? ]
[ if(rawdata > 32768)]
[ ? ? ? ? ? ? ? ? ? ? ? { ]
[rawdata ?=65536? ?]
[ ? ? ? ? ? ? ? ? ? ? ? ?}]
[sum = ((0x80 + 0x02 + xxHigh +]
[ xxLow)^ 0xFFFFFFFF) ?0xFF;]
如果sum 和 xxCheckSum 是相等的,那說明這個包是正確的。在第513個大包里包含了信號強度 Signal, 專注度 Attention, 冥想度Meditation, 和 8 個 EEG Power 的值,需要根據(jù)通信協(xié)議進行層層校驗和并進行一系列計算,最終讀取數(shù)據(jù)。
4.3 腦電波的處理
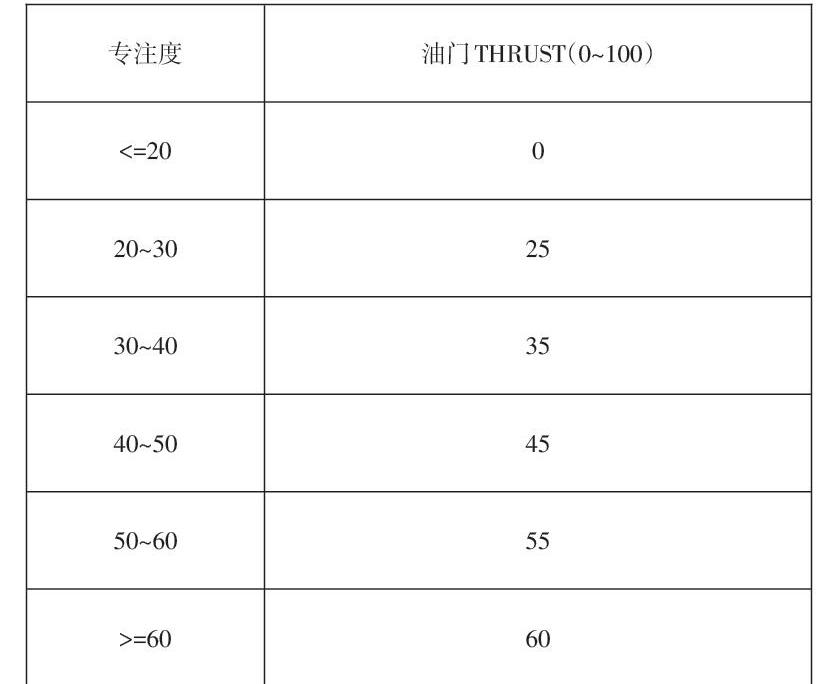
通過編程解析轉(zhuǎn)換數(shù)據(jù),可以使其控制飛行器的起飛和降落。專注度越高,飛行器的油門越大,飛行器飛的高度越高。為了確定油門的最低值,經(jīng)過一系列測試,其中圖3測試表明最低專注度為20左右。因此在專注度小于等于20時,油門設為0。下表為專注度與油門的等級劃分:
[專注度 油門THRUST(0~100) <=20 0 20~30 25 30~40 35 40~50 45 50~60 55 >=60 60 ]
飛行器具有定高飛行的功能,因此一定的油門對應相應的飛行高度,為了保證飛行器的安全,因此將最高油門設為60。
由于一秒鐘可以采集513個信號強度,但只能采集1個專注度和冥想度,因此數(shù)據(jù)變化會比較緩慢,而值與值的差異會相對比較大。此外,經(jīng)過測驗,專注度無論如何都無法達到100,并且都低于90,通過歸一化處理,將0到90的值限制在到0~100當中。在歸一化之前需要進行濾波處理,每次采集10個值,存入數(shù)組C[10],經(jīng)過冒泡排序去掉兩個最低值,去掉兩個最高值,剩余6個值取平均,如此一來一分鐘只能取36個值在0~100的專注度。因此控制的精度具有一定的局限性,但提供了一種比較合理的新型控制方式。
通過實驗,可以看出腦電信號的強弱程度能夠用專注度和冥想度數(shù)值來體現(xiàn),當專注度數(shù)值增大的時候,大腦注意力處于慢慢集中狀態(tài),腦電信號較強;反之,腦電信號較弱。冥想度正好與腦電信號相反,當冥想度數(shù)值增大的時候,腦電信號較弱;冥想度數(shù)值減小的時候,腦電信號較強,因為此時大腦處于興奮、緊張狀態(tài),安靜程度較弱。因此可以利用大腦狀態(tài)與專注度和冥想度之間的對應關系進行編程應用。
實驗中還發(fā)現(xiàn),眨眼的時候,原始數(shù)據(jù)rawdata會發(fā)生劇烈的波動,如圖3所示。因此,可以利用前后數(shù)值的誤差進行波動比較,波動誤差超過一定值,表明人物發(fā)生眨眼動作。在該思想指導下,利用眨眼信號進行無人機向前飛和向后飛的控制。眨眼一次,改變一次飛行狀態(tài)。其控制流程圖如圖4所示,實驗取得了良好的效果。
此外,利用該方法進行燈泡的亮滅控制,呼吸燈的亮度控制,智能小車的速度控制等都取得了良好的調(diào)控效果,實驗證明,該方法可以應用到多種連續(xù)性控制領域。并且選用更高的精度腦電提取芯片,其控制效果會更加好。
5 總結
本文介紹了基于TGAM的意念控制無人機系統(tǒng),利用TGAM模塊提取出來的專注度和冥想度和原始數(shù)據(jù)rawdata進行了實驗研究,并取得了良好的控制效果,但是由于芯片本身的性能,使控制具有一定的局限性。此外這種控制系統(tǒng)具有很強的通用性,可以應用到各種無線控制領域。而腦電芯片可以提取的腦波有很多,對其他腦波的進一步研究,對于更加復雜的控制系統(tǒng)具有重要意義!
參考文獻:
[1] 岳敬偉,葛瑜,周宗潭,等.腦機接口系統(tǒng)中的交互技術[J].計算機測量與控制,2008,16(08):1180-1183.
[2] 紀建偉.基于EEG能量解碼的機械手控制方法研究[D].沈陽工業(yè)大學,2017.
[3] 王佳威.腦電波信號的處理方法和應用[D].北京郵電大學,2012.
[4] 封順天.可穿戴設備的發(fā)展現(xiàn)狀及趨勢[J].通訊技術,2013(3).
[5] 白冬梅.腦電信號的特征分析和特征提取[D].大連理工大學,2006.
【通聯(lián)編輯:代影】
