永磁同步電機的自抗擾控制調速策略
2019-07-21 07:18:12徐偉賈彬
建材發展導向 2019年1期
徐 偉 賈 彬
(1.唐山智鴻家電銷售有限公司,河北 唐山 063000;2.唐山創元方大電氣有限責任公司,河北 唐山 063000)
永磁同步電機是強禍合、非線性、參數攝動的被控對象,具有結構簡單、體積小、效率高、調速性能好等優點,以永磁同步電機為驅動裝置的傳動系統在交流調速中占有重要的地位。采用高性能控制策略有助于提高永磁同步電機傳動系統的各種動靜態性能,有利于電氣傳動系統向高性能、輕量化、高效節能的方向發展。
1 永磁同步電機簡介
電機(Motor)是一種依靠磁場為介質而進行機械能與電能之間相互轉換的裝置,一般情況下,主要有兩種產生磁場的方式來滿足電機能量的轉換:一是通過電勵磁的方式轉換,其原理是,給電機的勵磁繞組通入一定量的勵磁電流,該勵磁電流的作用是使電機的繞組能夠維持勵磁,這種方式的電機在日常生產生活中十分普遍,主要有同步、異步電機以及直流電機等;另一種是像永磁電機這類的電機,他們不需要勵磁電流,而是利用自身的永磁體產生磁場。
伴隨著科技的進步以及社會的發展,當前的永磁電機具有功率密度高、轉動慣量大、功率因數小以及效率高等特點,其在諸如民用、軍事、工業等領域得到了廣泛地應用。目前普遍應用于社會生產各領域的永磁同步電機(PermanentMagnetSynch ronousMotor,PMSM)和無刷直流電機(BrushlessdoMotor,BLDG)都是屬于永磁電機的范疇。對于無刷直流電機來說,它運行時由定子繞組和表面磁鐵所產生的反電動勢的波形是方波。利用反電動勢是方形波的特點,可以很輕松的獲得電機轉子的位置信息,因此,無刷直流電機的控制方式也顯得十分簡單。但無刷直流電機運行時容易產生轉矩波動,不能滿足大型高性能系統的要求,因此這種電機多用于像散熱器、壓縮機等之類的小型系統中。永磁同步電機與無刷直流電機的不同點主要體現在激勵電壓的方式以及控制策略這兩個方面。在永磁同步電機中,電機的反電動勢總體上是正弦波形,而反電動勢波形的優劣程度是由永磁材料充磁的質量所決定的。若在電機的轉子中能夠正確的放置永磁材料體,那么就可以得到純正弦的氣隙密度。但是由于實際情況下,定子繞組不可能精確正弦分布,所以氣隙密度也只可能是不精確的正弦波形。
永磁同步電機永磁體的安裝方式及其轉子結構對電機的性育出了永磁同步電機三種最基本的轉子安裝結構,分別為面貼式,有很大影響。圖1 給出了永磁同步電機三者最基本的轉子安裝結構。
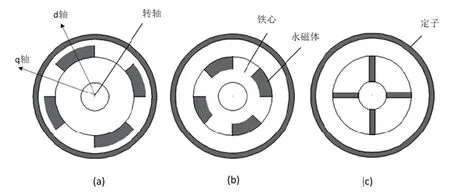
圖1
2 自抗擾控制技術
典型的自抗擾控制器是由三部分組成的,分別為跟蹤微分器(TD)、擴張狀態觀測器(ESO)、非線性狀態誤差反饋控制率(NLSEF)。TD 首先安排過渡,實現快速無超調地跟蹤系統給定的輸入信號,并且按照階數提取微分信號;其次,ESO 對系統輸出狀態和擾動進行觀測,同時對系統擾動進行前饋補償;最后通過NLSEF 對TD 的輸入和ESO 的誤差信號進行非線性組合,與ESO 檢測的綜合擾動一起作為被控對象的控制量。
2.1 追蹤微分器(TD)
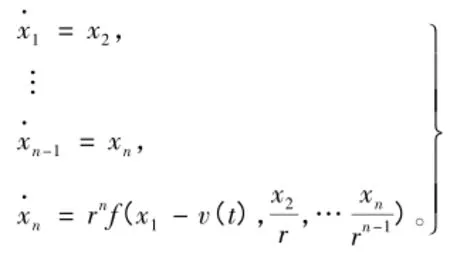
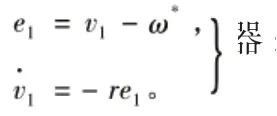
跟蹤微分器是自抗擾控制器的第一部分,跟蹤微分器通過合理的安排過渡過程來提高系統的響應速度,這樣不僅降低了系統的超調量也使其能夠快速的跟蹤系統參考輸入量,同時按照控制器的階數得到近似的微分信號。設動態系統:

其中任意解均滿足在原點漸近穩定,則對于任意有界可積的函數v(t)為輸入的新動態系統
2.2 擴張狀態觀測器(ESO)
擴張狀態觀測器得到系統輸出信號y(t)的跟蹤信號z1(t)和各階導數信號zi(t),以及系統擾動估計信號zn+1(t)來對擾動進行估計。將外部擾動和模型誤差擴充為一個新狀態變量,根據經典狀態觀測器原理可得到如下方程:
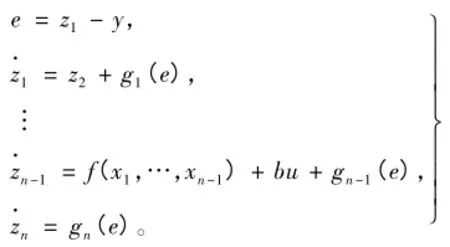
選擇合適的函數就可以將系統的各狀態變量以及總擾動觀測出來。
2.3 非線性狀態誤差反饋控制器(NLSEF)
跟蹤微分器(TD)和擴張狀態觀測器(ESO)分別產生跟蹤信號和狀態變量,非線性狀態誤差反饋控制器是通過對以上兩個參數的誤差采用函數來求解控制量的結構。一般形式如下:
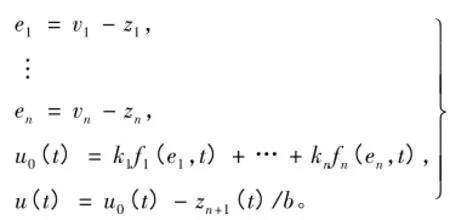
其中:ei(i=1,2,…,n)是個跟蹤信號與狀態變量估計值之差;fi(ei,t)為非線性函數;u0(t)是系統控制量;-zn+1(t)/b起補償擾動的作用。
3 永磁同步電機自抗擾控制器的設計
設擾動:
得出
由上式可以看出永磁同步電機的運動阻尼系數、轉動慣量以及外部擾動均可在a(t)中體現出來。所以要合理安排過渡來實現輸入信號被實時的跟蹤。同時為了提高系統的抗擾動能力要對a(t)進行觀測和補償。因此,根據自抗擾控制原理設計的一階自抗擾控制器具體結構如圖2 所示。其中:ω*為給定速度變量;v1 為跟蹤信號;ω 為電機實際轉速;z1 為觀測信號;z2為擾動反饋。
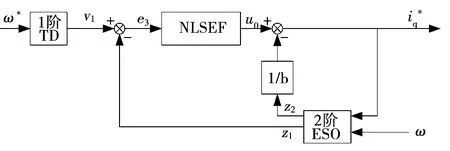
圖2 一階自抗擾控制器結構圖
二階擴張狀態觀測器:
一階非線性狀態誤差反饋控制器:

4 結語
本文探討和研究了基于自抗擾控制策略的永磁同步電機傳動系統,隨著控制理論和電氣技術的不斷發展,將會有更多先進的現代控制理論被應用于永磁同步電機無速度傳感器的研究工作中,以期使系統的動靜態性能進一步完善。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
