艦載雷達對抗設備測向精度試驗系統誤差分析及修正方法
2019-07-22 00:58:16周文輝閔柏成
艦船電子對抗 2019年3期
周文輝,閔柏成
(1.解放軍91404部隊,河北 秦皇島 066001;2.中國船舶重工集團公司第七二三研究所,江蘇 揚州 225101)
0 引 言
隨著干涉儀測向技術、單比特頻域多波束測向技術等在艦載雷達對抗設備中的廣泛應用,雷達對抗設備的方位測量誤差越來越小,這就對組織試驗考核提出了更高的要求。外場動態試驗中,受被試設備臨時安裝條件的影響,雷達對抗設備測向天線安裝位置與試驗平臺艏艉線不平行而引起偏離一定的角度;雷達對抗設備測向天線與提供艦位信息、航向姿態的試驗平臺姿態測量系統天線位置不一致等,都會造成一定的系統誤差,這種誤差對雷達對抗設備的測向精度考核結果造成較大偏差[1-2]。因此,需要測量計算出系統誤差并對試驗數據進行誤差修正,以消除和減弱系統誤差對試驗結果的影響。
1 系統誤差產生原因分析
外場進行雷達對抗設備測向精度試驗時,產生誤差的原因多種多樣,主要有以下幾個方面:測量設備本身的誤差、被試設備的安裝誤差、人為操作使用不當引起的誤差、測量條件不正常或測量環境變化影響引起的誤差等。有的誤差可以避免,有的誤差需要進行修正和處理,下面主要從被試設備安裝誤差、被試設備測向天線與試驗平臺姿態測量系統天線位置誤差、陪試設備大地坐標標定誤差3個方面進行分析論述。
1.1 被試設備安裝誤差
被試設備安裝在艦船試驗平臺上,理想情況是被試設備的測向天線中心線與艦船試驗平臺艏艉線連線平行,此條件下不存在被試設備安裝誤差,對測向精度試驗結果無影響。實際上,由于受到試驗平臺條件的限制,被試設備測向天線的安裝不可能是理想狀態,總是存在安裝誤差,即被試設備的測向天線中心線與艦船試驗平臺艏艉線連線的方向存在一個固定的角度,如圖1所示。在這種情況下,對測向數據進行處理時,就需要加上(或減去)一個固定系統誤差Δθ[2]。
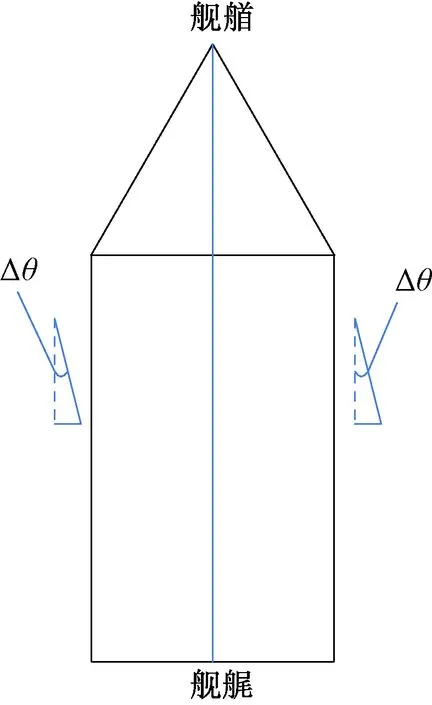
圖1 測向天線安裝示意圖
1.2 被試設備測向天線與試驗平臺姿態測量系統天線位置誤差
雷達對抗設備測向天線一般安裝在艦船試驗平臺的主桅桿上,要求四周無遮擋,而提供艦位信息、航向姿態的試驗平臺姿態測量系統的天線在安裝位置上受到多種因素的限制,只能選擇合適的位置架設,且GPS天線的軸向盡量要與艦船試驗平臺的艏艉線連線平行,二者之間存在著一定的安裝距離,如圖2所示。以試驗平臺姿態測量系統天線2所在點位置參數作為被試設備位置來解算舷角作為真值,這樣就產生了偏心觀測誤差,誤差大小隨著艦船位置及航向變化而變化[3]。
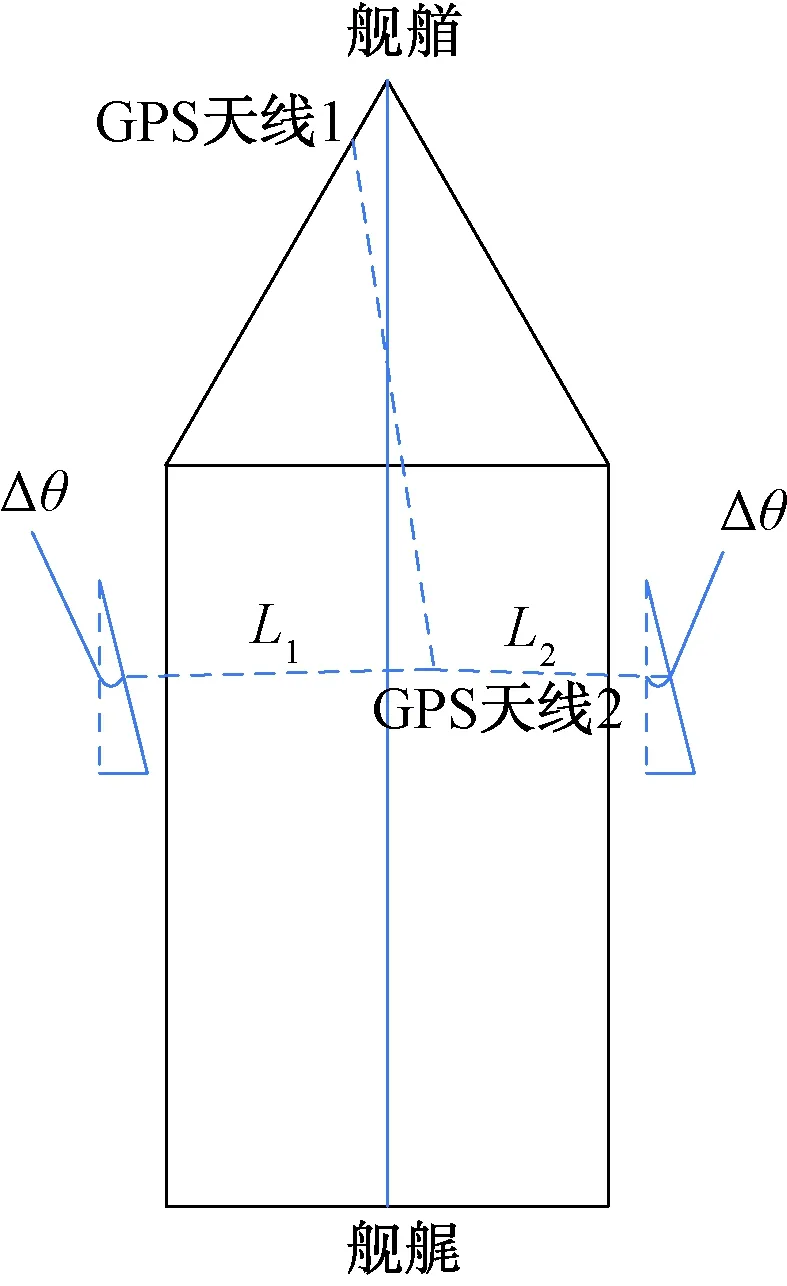
圖2 測向天線與GPS天線位置誤差示意圖
1.3 陪試設備大地坐標標定誤差
雷達對抗設備測向精度試驗采用的真值是由試驗平臺姿態測量系統提供,利用GPS天線所在的位置參數和陪試雷達的大地坐標來解算艦船試驗平臺與岸站陪試雷達的舷角作為真值。由于陪試雷達位置標定存在誤差,解算出的舷角存在偏心誤差[4]。
2 系統誤差修正方法
2.1 被試設備安裝誤差修正
2.1.1 誤差修正設備
在綜合處理外場試驗的測向精度測試數據時,可以利用全站儀對被試雷達對抗設備安裝誤差進行測量和計算。全站儀,全稱全站式電子測距儀,是一種集經緯儀、電子測距儀、外部計算機軟件系統為一體的現代光學電子測量儀器。它可以在一個站位完成水平角、垂直角、距離、高差測量等全部工作。全站儀通過電子光學掃描鐫刻在鏡片上的十字劃分板來測量角度,精度可以達到0.5 s。測距則是以安裝在同軸望遠鏡的光敏二極管以一定光學路徑發出調制微波或紅外線信號,通過測量點的直角棱鏡反射后通過相同的光學路徑返回并被分光棱鏡傳遞至傳感器以接收回饋,通過計算原始信號與反射信號的相位差來計算路程的遠近,它的測距可以達到0.1 mm的精度。
2.1.2 誤差修正原理
假設AB為被試雷達對抗設備測向天線的安裝基線,OM為試驗平臺艏艉線,如圖3所示。
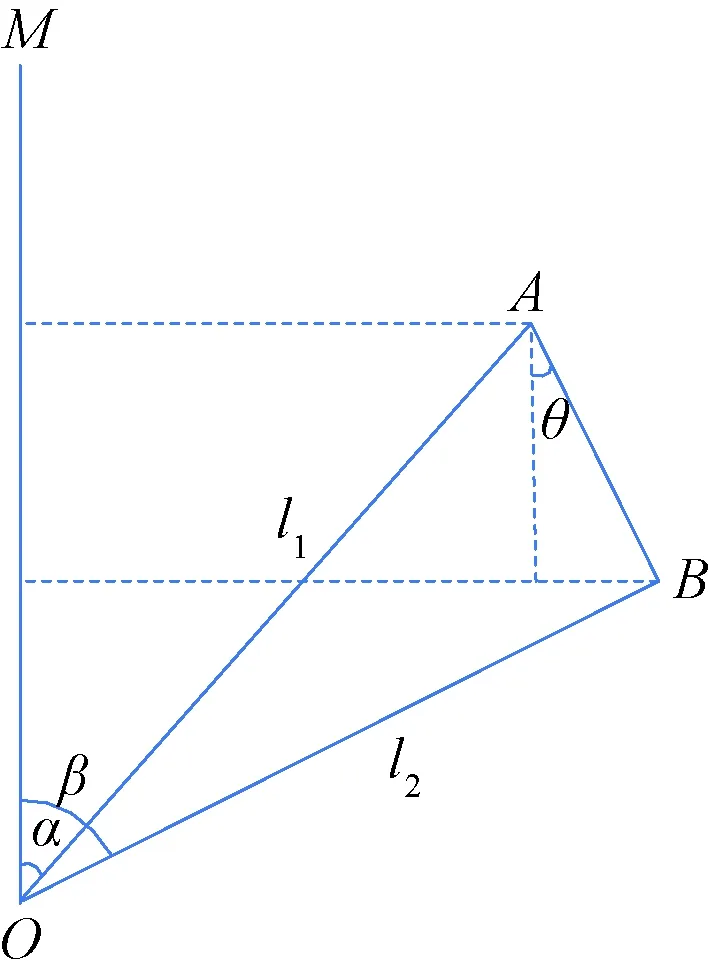
圖3 誤差修正原理示意圖
則被試雷達對抗設備測向天線安裝基線AB與試驗平臺艏艉線OM的夾角為:
(1)
式中:l1為OA水平距離;l2為OB水平距離;α為OA方位角;β為OB方位角。
2.1.3 誤差修正方法
在對某型艦載雷達對抗設備進行誤差標定時,具體標定測量架設位置如圖4所示。
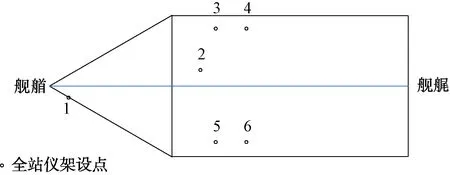
圖4 標定架設位置示意圖
全站儀架設于碼頭上,位于被試設備試驗平臺左前方。測量點1、2為試驗平臺姿態測量系統天線的架設點,測量點3、4為右舷天線安裝螺孔,測量點5、6為左舷天線安裝螺孔。分別測量6個測試點距離全站儀的方位、距離、俯仰角,計算系統安裝誤差如表1所示。在計算過程中,以試驗平臺姿態測量系統天線架設點連線作為試驗平臺的航向姿態基準線,分別計算左右舷測向天線相對GPS天線連線的夾角,在實際數據綜合處理時,左右舷測向數據分別加上(或減去)對應偏軸誤差。
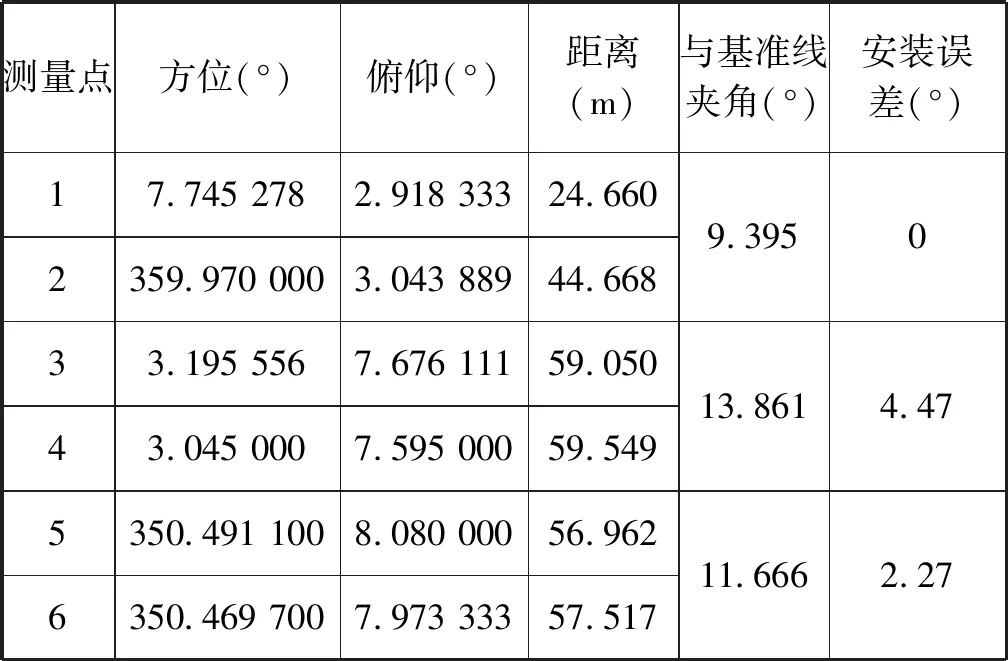
表1 測量數據表
2.2 被試設備測向天線與試驗平臺姿態測量系統天線位置誤差修正
2.2.1 誤差修正設備
利用全站儀及試驗平臺姿態測量系統綜合處理計算。
2.2.2 誤差修正方法
提供艦位信息、航向姿態的試驗平臺姿態測量系統天線安裝時盡量在試驗平臺艦船艏艉線上,末端天線所在點與被試設備測向天線存在一定安裝距離,以末端天線所在點位置參數作為被試設備天線位置來解算舷角作為真值,解算出的角度與實際角度有一定的誤差,被試設備試驗平臺航行到某一位置時,各位置角度與距離如圖5所示。
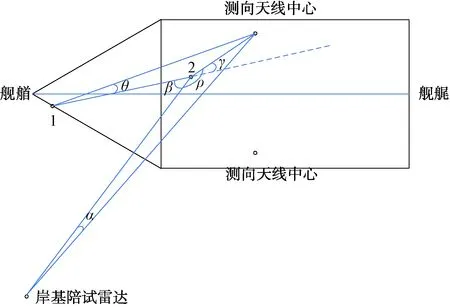
圖5 誤差修正方法示意圖
試驗平臺姿態測量系統GPS天線1架設在艦艏,GPS天線2架設在前甲板,與被試設備測向天線3點位置固定。設被試設備測向天線與試驗平臺姿態測量系統天線位置誤差為α,利用全站儀測量出被試設備測向天線中心和試驗平臺姿態測量系統GPS天線2連線的距離L1,測量試驗平臺姿態測量系統GPS天線連線延長線與L1的夾角γ。試驗平臺姿態測量系統可提供岸站參試雷達與GPS天線2的距離L2及測量試驗平臺姿態測量系統GPS天線連線與L2的夾角β(β是個變化量),簡化圖形如圖6所示。
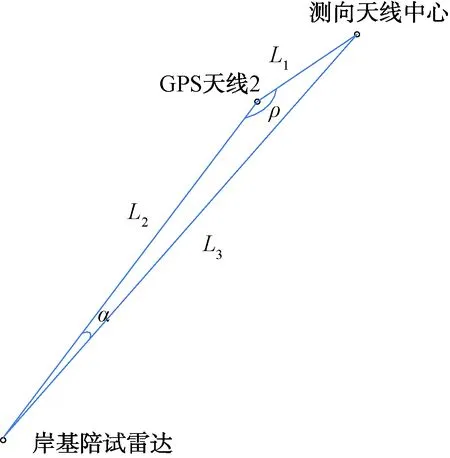
圖6 誤差修正方法簡化示意圖
根據余弦定理可得出:
(L3)2=(L1)2+(L2)2-2L1L2cosρ
(2)
式中:ρ=180°-β+γ。
根據正弦定理:
(3)
可得出誤差α為:
(4)
式中:β是個變化量,隨著試驗平臺的位置和航向變化而變化。
在做測向原始數據綜合處理時,應對每一個點的測向數據結果進行修正,修正時要注意修正誤差角度時的象限變化。
2.3 陪試設備大地坐標標定誤差修正
雖然岸站陪試雷達位置標定存在誤差,但由于標定誤差甚小,對測向精度影響程度不大,可忽略不計。為避免誤差的產生,在做試驗準備前,需要提供高精度的大地點位置坐標,并將陪試雷達設備放置在大地點坐標上,將標定誤差降至最低。
3 系統誤差修正比對
通過上述分析測向精度試驗中產生的系統誤差種類和原因及修正方法,測量完成修正各系統誤差所需的數據,編寫“測向精度處理程序”,完成對測向數據中存在的這些系統誤差分析、奇異數據的剔除、誤差修正等,最終得到測向精度結果。
現舉例說明在對某一新型雷達對抗設備測向精度動態試驗時,對試驗數據進行綜合試驗處理。測試某型陪試雷達,實際試驗數據1 474點,未經過任何處理時測向精度為6.15°(r.m.s);剔除明顯奇異數據5點,測向精度為5.47°(r.m.s);對剩余1 448點數據進行誤差修正,計算機自動處理,去除被試設備安裝誤差及被試設備測向天線與提供艦位信息、航向姿態的試驗平臺姿態測量系統GPS天線位置誤差,最后得出有效的測向精度為2.63°(r.m.s),滿足該雷達對抗設備戰術技術性能指標。
從試驗數據綜合處理的結果可以看出,通過對系統誤差的修正,可消除測量設備或被試設備安裝系統誤差對測向精度的影響;根據萊特準則剔除明顯奇異數據,可消除其對試驗結果的影響,得到精確的量化結果,提高試驗結果的準確性。圖7、圖8和圖9分別為該雷達對抗設備測向精度試驗數據進行綜合處理前后誤差曲線圖。
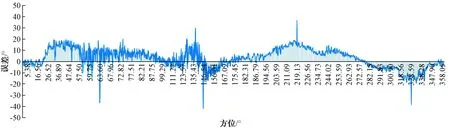
圖7 原始數據測向精度曲線圖
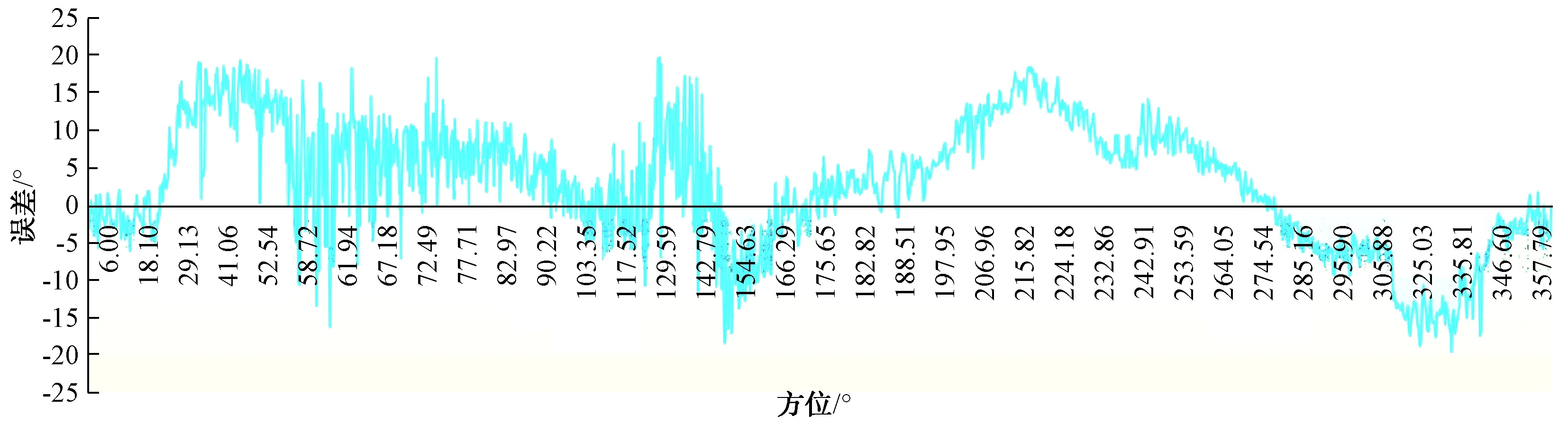
圖8 剔除明顯奇異數據測向精度曲線圖
4 結束語
通過分析動態試驗中影響艦載雷達對抗設備測向精度的幾種原因,闡述了誤差修正的原理和方法,對大量的測向精度試驗數據采用綜合處理方法,利用“測向精度處理程序”完成對試驗數據中存在的系統誤差分析、誤差修正、奇異數據剔除等,減小系統誤差對試驗結果的影響,確保試驗結果的可信度,對艦載雷達對抗設備的測向精度結果評估更為精確、合理。
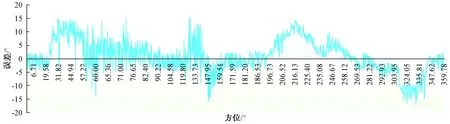
圖9 系統誤差綜合處理后測向精度曲線圖
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
工業設計(2016年12期)2016-04-16 02:52:00
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
設備管理與維修(2015年12期)2015-04-09 06:57:00