CANaerospace協議探究及設計應用
2019-07-22 00:58:52吳一坤
艦船電子對抗 2019年3期
關鍵詞:信息
吳一坤
(中國電子科技集團公司第二十研究所,陜西 西安 710068)
0 引 言
當前,數據總線技術被廣泛應用在飛控系統中,提升了整個系統的可靠性、靈活性及擴展性。CAN作為標準的工業總線之一,具有獨特的設計思想、優良的性能,經過多年發展已日趨成熟,在眾多領域得到了廣泛應用。實現CAN總線系統通信需要依托標準的CAN協議規范,就像用戶使用互聯網需要依托TCP/IP協議一樣[1]。CAN總線提出的CAN2.0 A/CAN2.0B協議標準,使它具有物理層和數據鏈路層功能。在此基礎上,CAN應用層協議往往需要用戶自行設計制定,或采用國際組織已發布的成熟應用層協議進行剪裁移植。
CANaerospace由德國Stock航空系統公司制定,是目前應用在航空領域較為主流的CAN應用層協議之一,適用于飛行器機載設備之間進行總線通信。探究其協議特點、報文結構、總線調度機制等核心技術規范,并對其剪裁移植、優化設計,以實現應用驗證,是本文研究的重點。
1 CANaerospace協議探究
1.1 協議特點
CANaerospace規范了航空機載設備間總線通信的協議接口,其主要特點如下[2]:
(1) 總線型網絡拓撲,如圖1所示。支持3種數據傳輸方式:點對點、多主以及廣播。無需系統啟動過程,不會出現因為主站失敗而引發的危險情況。
(2) 針對應用場景高可靠性要求,支持系統冗余。
(3) 總線網絡可在一定范圍內動態調度,支持節點熱插拔。
(4) 協議規范公開,用戶可自定義協議內容及報文類型等,便于擴展應用。
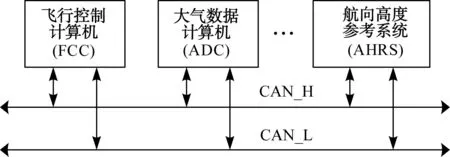
圖1 CANaerospace總線型拓撲結構
1.2 報文類型和消息格式
1.2.1 報文類型
CANaerospace協議定義了7種基本報文類型,每種類型都具有特定的功能作用和使用規范,如表1所示。同時,對每種報文類型分配了固定的CAN標識符范圍,用來定義它們的優先級,而范圍內的標識符可由用戶自行制定分配。
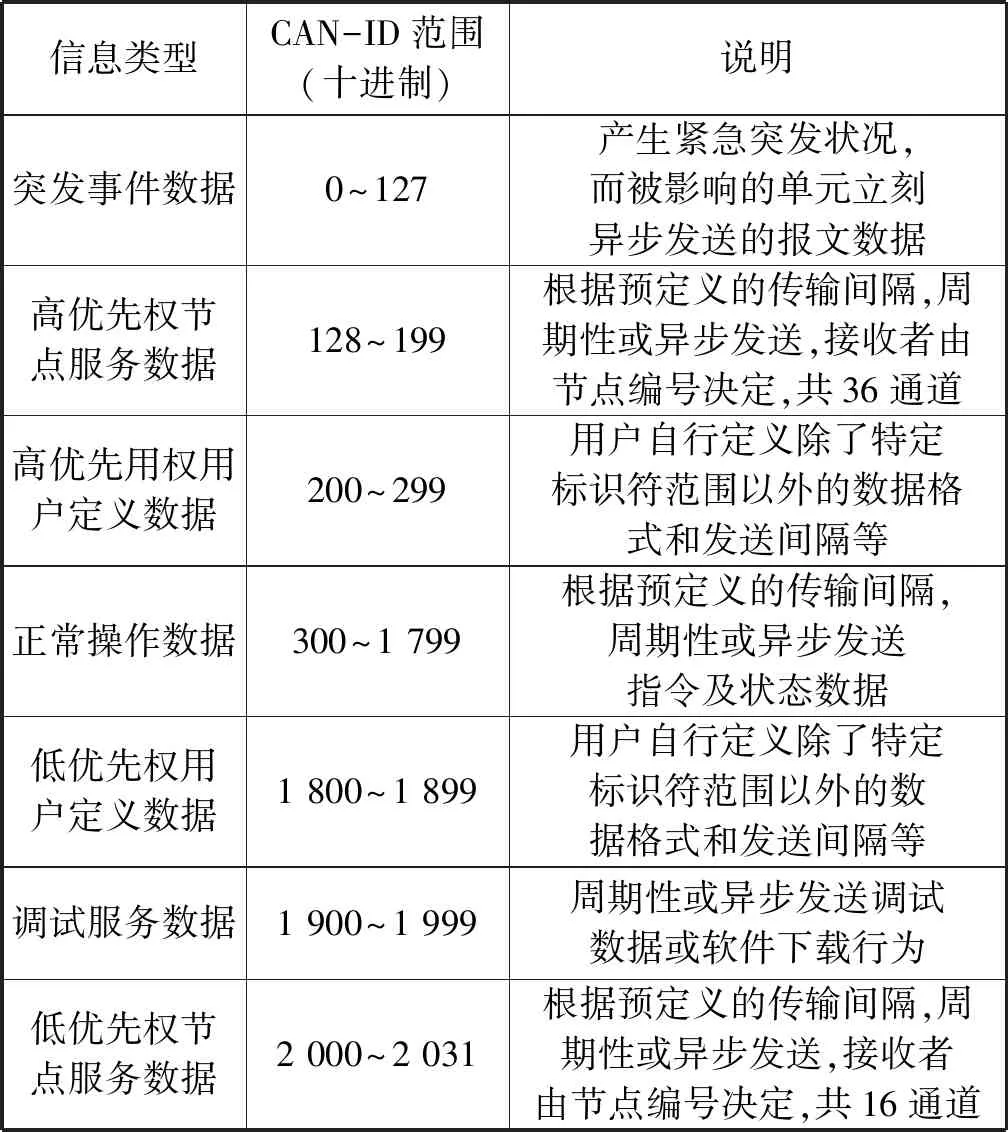
表1 CANaerospace報文類型及說明
該協議標準保證了總線上所有消息報文都具有唯一的CAN標識符,即每條報文具有唯一的優先級。當總線多節點同時發送報文時,高優先級信息先被傳輸,較低優先級信息停止發送,并等總線空閑時再次嘗試。
1.2.2 消息格式
CANaerospace協議規定采取“大端模式”,基本信息格式如圖2所示,所有報文數據域分為兩部分(共8字節),用來表示報文的標題和報文有效數據信息[3]。

圖2 CANaerospace消息數據域格式
節點編號主要用于標識總線數據傳輸中的不同節點,表示范圍為1~255,編號0表示所有節點。
數據類型標明總線報文的數據特征。CANaerospace規定每條報文都支持多種數據類型(FLOAT、LONG、SHORT、CHAR等),用戶也可在特定標識符范圍內自行定義需要的數據類型。
服務代碼即節點服務協議代碼。對于正常操作數據,它用來表征此刻總線數據的狀態,使得在任何時間,都對節點單元接收數據的有效性已知。
報文編號按照總線上報文傳輸的數量增加,超過255后又歸0,并再次進行累加。此編號用于監測報文信息傳輸進程和正確順序,以驗證總線節點是否正常工作。
1.3 定時觸發總線調度
CANaerospace協議規定數據傳輸基于時間觸發方式進行,正常工作狀態下,各類報文信息會按照協議預先分配的周期時間進行傳輸,同時也在特定情況下接收中斷,傳輸非周期信息。以CANaerospace基準系統為例,如表2所示,設定系統信息傳輸頻率為80 Hz,即傳輸周期為12.5 ms,這里將12.5 ms的傳輸時間稱為最小傳輸間隔。在實際控制系統應用中,并不是所有設備報文信息都需要以如此短的周期傳輸,可以根據設備信息的具體情況,對最小傳輸間隔進行不同組合,以滿足各類報文信息的傳輸需求,使總線上能傳輸更多參數[4]。
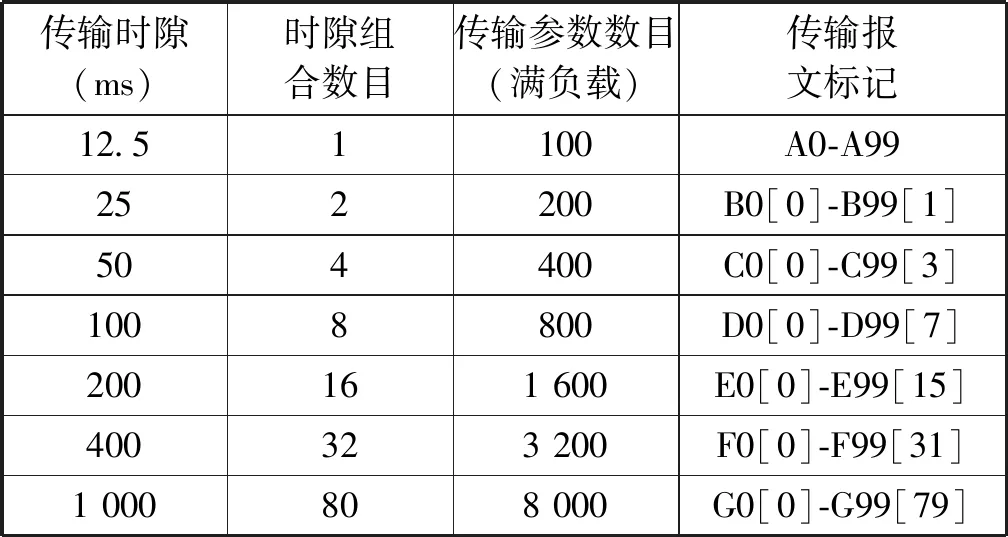
表2 基準系統報文定時發送頻率
2 協議制定
基于對CANaerospace協議的詳細探究,本章將對其進行剪裁移植,優化設計出運行在實驗室飛控系統原理樣機的CAN總線應用層協議。
2.1 通信情況
飛控系統原理樣機中,飛控計算機通過總線與伺服舵機進行數據交互,作為系統的主控節點,它以80 ms為周期向伺服舵機發送控制指令,伺服舵機收到指令后立即響應,并以20 ms為周期回報自身舵面角度和舵機狀態信息。總線上可能傳輸的數據幀主要分為2類:飛控計算機發送的控制指令幀和伺服舵機回報信息幀,控制指令幀優先級高于回報信息幀。
CAN總線飛控系統通信模型主要為生產者/消費者模型。該通信模型下,在總線非破壞性仲裁中,競爭獲勝的節點,成為發送信息的“生產者”,其余節點成為接收信息的“消費者”。設置總線通信波特率為500 kbps。數字舵機節點傳輸的報文信息種類有限,數據量較少,正常工作模式下,協議中不考慮多幀傳輸的情況。
2.2 報文結構
CANaerospace支持CAN2.0B協議,兼容CAN2.0 A。考慮原理樣機系統傳輸的數據種類少、總線系統節點個數少以及減小信息延時等方面的原因,本協議制定使用11位標識符,并規定節點之間數據交換只使用數據幀,不使用遠程幀傳輸。
采用標識符靜態分配方式,將總線上可能傳輸的2類數據幀ID設定在CANaerospace協議正常操作數據范圍(CAN-ID為0x12C至0x707)內,控制指令和狀態數據根據傳輸間隔,周期性傳輸或中斷執行。
數據域中,CANaerospace協議原理樣機數據幀結構如表3所示。結合原理樣機在總線上數據傳輸的特點,本協議制定如下:
D0定義為節點ID,在飛控系統原理樣機中,存在的節點包括飛控計算機和多個安裝在不同位置上起不同作用的數字電動舵機,D0就用來區分網絡上所有節點的位置信息,給每個節點都標識出ID號,當節點ID為0x00時,代表“所有節點”,表明可能會有廣播幀的發送;
D1定義為數據類型,CANaerospace協議允許多種數據類型在總線上傳輸,并對不同數據類型定義了不同標識,對于數據接收者只要分析信息幀數據域D1的內容便可根據協議得出總線數據類型,這里制定發控指令和回報信息都為SHORT型(0x06);
D2定義為服務代碼,對于正常操作數據,此字節顯示當下的總線數據狀態,保證了接收數據的有效性,CANaerospace協議已定義節點服務有4類,對原理樣機定義為保留狀態(XXS),供將來擴展使用;
D3定義為報文編碼,編碼按照數據幀發送數量而自動增加,最大至255后歸0,再從0開始重新計數增加,可以通過報文編碼來測定報文的進程和正確的順序,監測總線收發;
D4~D5定義為舵面偏轉角信息,最高1位為符號位,說明舵面偏轉的正負方向,低15位為數據有效位,表明具體的偏轉角度;
D6~D7定義為其他數據,例如電動舵機類型等。

表3 CANaerospace協議原理樣機數據幀結構
3 協議驗證
3.1 原理樣機實驗概述
本實驗CAN總線網絡上掛接飛控計算機節點、數字電動舵機節點以及PC機節點,構成實驗室飛控系統原理樣機,如圖3所示。實驗方案中,飛控計算機作為主控節點,周期性向舵機節點發送舵面偏轉控制指令;電動舵機節點接收并響應飛控指令的同時,周期性向飛控計算機回報自身舵面實時偏轉角度;PC機節點作為總線上的第3個節點,接收并顯示CAN總線上的實時收發數據。RS-232串行總線連接飛控計算機與PC機,打印飛控計算機節點數據收發,有利于后續實驗數據的對比分析。

圖3 原理樣機實驗連接原理圖
3.2 數據分析
CAN總線飛控系統原理樣機測試實驗中,連接在總線上的PC機節點通過CANTest軟件平臺記錄所有通信發生過程中的數據信息。信息主要分為2類:飛控計算機每80 ms對電動舵機發送周期性控制指令,以及電動舵機每20 ms對飛控計算機回報周期性角度信息。
依據實驗的嚴謹性,隨機選擇3組由-20°~+20°循環的實驗數據,這3組數據在時間上是連續的,將第1組數據的第1幀記為基準時間0,后續數據按周期時間依次增加,如表4所示,對數據匯總解算。
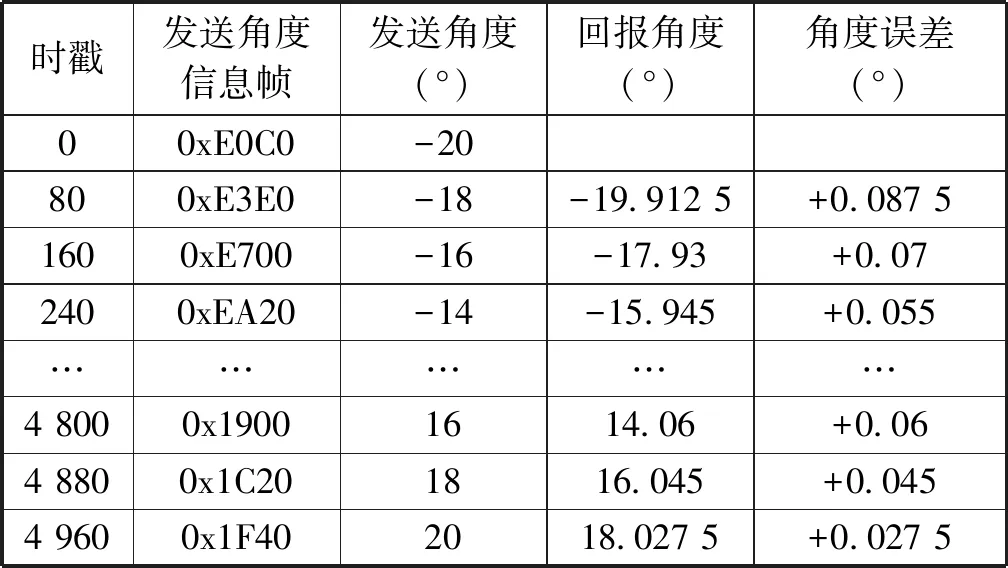
表4 原理樣機發控與回報角度數據
對3組實驗解算數據詳細分析,可得出以下結論:
(1) 時間連續的測試中,存在兩處角度“跳躍點”,它的出現是為驗證舵機在指令周期內,響應大角度偏轉而設計的結果。在每組測試最后一幀+20°的指令發送后,依舊等待80 ms,發送下一組測試的第1幀-20°的指令,相同周期內發控角度跨度由2°變為40°,發生了跳躍,舵面持續向目標角度偏轉,但短時間內無法到達,并繼續以20 ms為周期回報實時角度信息。
(2) 除去角度“跳躍點”所產生的非穩定狀態,計算每指令周期下發控角度和回報角度的誤差,分析3組數據,可得絕對值最大誤差為0.207 5°,最小誤差為0.007 5°,所有誤差絕對值處于0.007 5°~0.207 5°之間,遠小于±0.5°的誤差范圍,數據表現良好穩定。
利用MATLAB擬合發控角度和實時回報角度的數據信息,仿真制圖如圖4所示。觀測角度走勢,分析舵機回報角度對飛控計算機發控角度的跟隨性。
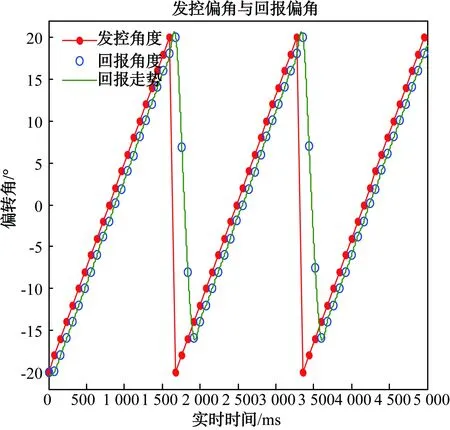
圖4 原理樣機通信數據曲線擬合
分析圖4可得出以下結果:
(1) 3組飛控計算機發送角度都分別從-20°~20°,爬升斜率一致,出現兩處角度“跳躍點”;
(2) 由結果走勢可看出,回報曲線斜率基本同發控曲線斜率一致,每次相應的發控行為與回報行為之間相差一個指令周期,誤差值極小,可得舵機對飛控計算機的跟隨性良好,系統性能優良。
4 結束語
航空領域方面,CANaerospace是當今被廣泛應用的機載設備之間通信的應用層協議,本文對它的核心特點、報文類型、總線信息調度方式等規范進行了深入探究,并著重應用此協議,進行剪裁移植,優化設計了關于實驗室飛控原理樣機的應用層協議。規范了樣機的通信模型和總線數據交互類型,以及報文結構內每個字節的具體定義等。通過飛控系統原理樣機的測試實驗,結果證明CANaerospace應用層協議制定正確、CAN總線無人機飛控系統通信性能良好。
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創業(2009年10期)2009-10-08 04:52:00
數字社區&智能家居(2009年7期)2009-09-29 08:16:48
數字社區&智能家居(2009年11期)2009-06-25 04:30:34
數字社區&智能家居(2009年3期)2009-04-21 03:09:04
數字社區&智能家居(2009年2期)2009-03-27 04:33:44
數字社區&智能家居(2009年12期)2009-02-03 07:50:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32