運動反饋虛擬現實四肢康復系統訓練模塊設計
2019-07-25 08:10:20王俊華吳珺
中國康復理論與實踐 2019年7期
關鍵詞:康復
王俊華,吳珺
1.廣東省第二中醫院,廣東廣州市510095;2.廣州博愛醫院,廣東廣州市521006
隨著人口老齡化進程加快,以及生產安全事故、交通事故等致殘因素的影響,腦卒中、腦外傷發生率居高不下[1-3]。肢體運動功能障礙是腦卒中和腦外傷后的常見癥狀,嚴重影響患者的生活質量和日常生活能力,并給家庭和社會帶來沉重負擔[4-5]。
目前國內外研發的肢體康復訓練設備,一般分為助動康復訓練設備和主動康復訓練設備,前者為機器帶動,如上肢機器人、機器手、步行訓練機器人等,通常價格昂貴,且為被動訓練,適合肌力0~Ⅱ級的患者;后者多為家具式上肢康復設備,如磨砂板、手搖輪等,治療師與患者一對一訓練,訓練過程枯燥,治療師人力成本高,訓練效率也低[6-7]。瑞士Hocoma公司的上肢康復設備ArmeoPower及其他單上肢康復訓練系統屬于后者,技術有進步,但在適用范圍、精準康復、虛擬現實、運動反饋及四肢協調訓練等方面都存在一些問題[8-10]。
本研究設計一種以上肢康復訓練為主、雙下肢配合訓練為輔的四肢康復訓練系統,該系統有完善的虛擬現實運動反饋技術和多種精準康復訓練方案。
1 總體架構
該系統由上肢訓練平臺、下肢操作裝置、虛擬現實系統、智能評估系統、座椅裝置和設備底座組成(圖 1)。
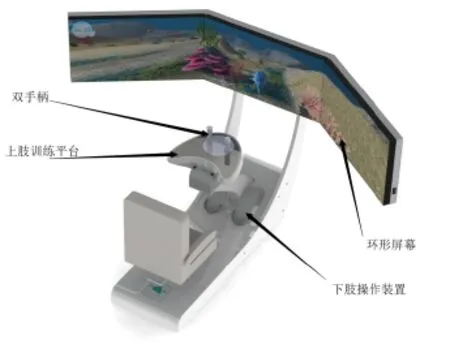
圖1 運動反饋虛擬現實四肢訓練系統結構示意圖
1.1 上肢訓練平臺
上肢訓練平臺是四肢康復訓練系統的核心構件,主要由上肢操作裝置和支撐架組成。上肢操作裝置通過垂直擺動關節與支撐架連接,并通過支撐架與設備底座連接。
上肢操作裝置包括水平旋轉運動裝置和鎖定結構(電磁剎車)、垂直擺動運動裝置和鎖定結構,以及在該2個運動裝置上的角度傳感器(圖2、圖3)。
水平旋轉運動裝置的旋轉軸和鎖定結構在上肢操作裝置的腔體內,表面呈現旋轉盤和成對設置操作手柄(圖1);水平旋轉運動繞旋轉軸轉動,最大角度±105°;水平旋轉運動通過電磁剎車實施鎖定結構,通過磁滯控制器實現阻尼功能,阻尼0~0.3 N?m可調。
垂直擺動運動矢狀面繞垂直擺動軸,實現整個上肢操作裝置的上下擺動,擺動角度-38°~+15°;鎖定結構是滑動桿和旋鈕,無阻尼功能。
通過操作兩個鎖定結構,可實現上肢操作裝置的3種工作方式,即水平旋轉運動、垂直擺動運動和立體綜合運動。

圖2 上肢操作裝置結構示意圖A
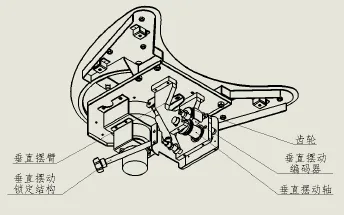
圖3 上肢操作裝置結構示意圖B
患者使用時,一般按以下順序操作。①選擇單或雙手柄:上肢癱瘓重者選擇雙手柄操作,由健側上肢帶動患側上肢運動;癱瘓輕者選擇患側單手柄操作,患側上肢自主運動;更輕者,除選擇單手柄操作外,還可通過磁滯控制器實現阻尼功能,患側上肢負重水平旋轉運動。②選擇水平旋轉運動:通過鎖定垂直擺動運動裝置的鎖定結構,同時放開水平旋轉運動裝置的鎖定結構,操作手柄完成水平旋轉運動;因有平面支撐上肢,該運動容易完成,故適用上肢癱瘓較重者。③選擇垂直擺動運動:通過鎖定水平旋轉運動裝置的鎖定結構,同時放開垂直擺動運動裝置的鎖定結構,操作手柄完成垂直擺動運動;因該項運動有一定負重,故適用上肢癱瘓稍輕者。④選擇立體綜合運動:同時放開水平旋轉運動、垂直擺動運動裝置鎖定結構,操作手柄完成立體綜合運動;這項運動難度稍大,需要患者上肢有一定功能,故適用上肢癱瘓輕者。推薦的康復訓練方案見表1。
雙手柄設計,幫助患者實現健側上肢帶動患側上肢運動,增大該設備使用范圍,一側上肢肌力0級也可使用。
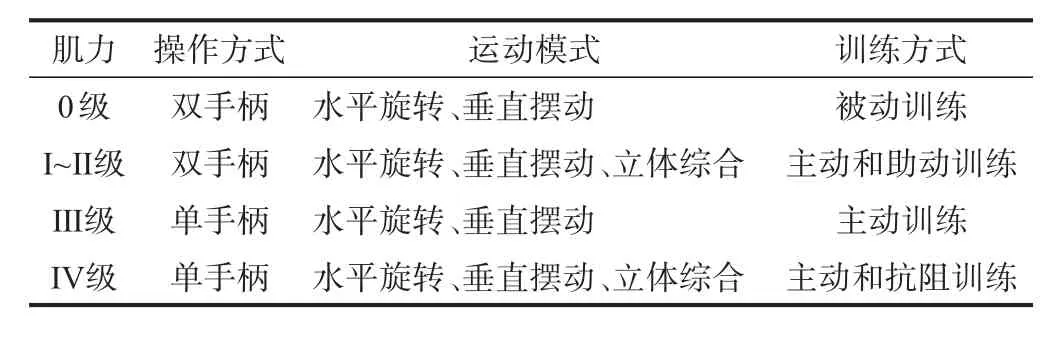
表1 分級康復訓練方案
1.2 下肢操作裝置
下肢操作裝置包括腳踏板、轉動軸、軸承座和角度傳感器,兩腳踏板與轉動軸固定連接。腳踏板旋轉運動是矢狀面運動,繞其轉動軸轉動,其最大轉動范圍為0°~35°。
使用時選擇單或雙腳踏操作。下肢癱瘓重者,選擇雙腳踏操作,健側下肢帶動患側下肢腳踝運動;癱瘓輕者選擇患側單腳踏操作。
通過雙腳踏結構設計,幫助患者完成下肢踝關節矢狀面的屈伸運動,糾正偏癱患者常見的足下垂。更重要的是,通過傳感器和虛擬現實系統,雙腳踏運動可以協調配合上肢康復訓練。
1.3 底座和座椅
底座用于固定該設備,一端為顯示屏支架,一端為固定椅座的滑道,中間固定上肢訓練平臺的支撐架和下肢操作裝置(圖1)。
座椅由椅底座、支撐桿、訓練椅本體組成。座椅可以前后移動,高度通過氣壓或電動調節,方向可以旋轉。可以滿足不同身高患者的需求,并方便癱瘓患者上下。
2 虛擬現實系統
虛擬現實訓練系統包括顯示模塊、訓練方案模塊與傳感器模塊。
顯示模塊由3塊顯示屏左右連為一體,通過融合技術作為一個環形寬大屏幕使用。

圖4 康復訓練界面
虛擬訓練方案模塊利用三維圖像生成技術[11],構建虛擬訓練的場景。根據康復訓練需要,設計虛擬運動目標、虛擬道路或路線、虛擬障礙目標等。
傳感器模塊采用PAL58系列13位絕對式單轉型光電編碼器(長春三峰光電儀器制造有限公司),多用于旋轉軸旋轉量不超過360°的角度測量,并可直接讀取所對應的角度值[12-14]。
患者通過操作手柄、腳踏,實現四肢協調運動;利用角度傳感器采集四肢訓練的角度信號,實現人機交互。具體訓練方式為患者與虛擬運動目標和場景的互動,如操縱虛擬運動目標,沿著虛擬的道路或路線,碰撞或躲避障礙目標,實施四肢功能導向性訓練。讓患者置身于環形寬大屏幕前,增強虛擬現實訓練的視覺效果,提高沉浸感[15]。另外,通過智能算法,實時監測患者訓練表現,并給予即時運動反饋。
3 精準康復訓練方案
該系統的訓練方案基于患者肢體功能狀態情況而設計,由硬件和軟件組成。
康復訓練硬件[16]見表1,提供2種操作方式(單、雙手柄選擇)和3種康復運動方式(平面選擇、垂直擺動、立體綜合),共6種康復訓練模式。訓練界面如圖4。
確定操作方式、訓練模式后,對應出現虛擬現實訓練模塊;每個模塊中,又根據虛擬運動目標的速度、道路或路線的彎曲度、障礙目標數量或排放位置,分為容易、中等、較難3個級別。
綜合6種訓練方案和3種難易級別,設備可以為癱瘓患者提供18種康復訓練方案,滿足上肢不同癱瘓程度患者實現肢體精準康復訓練的需求。
4 討論
只有10%左右上肢和手癱瘓患者能恢復到具有實用功能的水平,而日常生活中60%~70%的功能動作需要上肢幫助完成,對患者進行上肢功能康復訓練顯得尤為重要[17]。另外,偏癱患者還存在足下垂、四肢運動不協調等諸多問題。探索改善癱瘓患者上肢功能障礙和足下垂、四肢運動不協調的康復技術和設備,一直是康復工作者努力研發的方向。
腦卒中患者的康復應從最簡單的運動開始,首先誘導是肩關節內收,直到患者手有運動后,再開始其他運動功能訓練[18]。另外,偏癱患者僅進行單側訓練是不夠的,還需要訓練對側,尤其應該進行雙手協同訓練[19-20]。雙側對稱性動作讓健側和患側同時參與活動,可經胼胝體連接激活患側腦主要動作區和輔助動作區,最終左右大腦同時激活,促進兩側肢體間協調能力提高,幫助患側手達成自主活動的目的[21-22];腦損傷后,損傷側半球對健側半球的抑制作用減弱,而健側半球對損傷側半球的抑制增強,雙上肢同時訓練可以使半球之間的抑制正常化[23-24]。
我們在四肢康復訓練系統的設計中,考慮到盡快“啟動”肢體運動和盡早達到運動功能恢復,創新性設計雙手柄、雙腳踏,使雙側肢體同時訓練;提供的虛擬現實運動訓練模塊屬于功能導向性訓練方案。在虛擬現實方面,我們提供具有較高沉浸感和互動性的技術:三屏合一的寬大視角環境;具有沉侵感的3D虛擬現實運動反饋訓練場景。我們還提供多達18種康復訓練方案,實施精準康復訓練。該四肢康復訓練系統已經獲得國家發明專利[25],并申請國際專利[26]。
四肢康復訓練系統將現有的單上肢訓練模式進展到四肢協調康復訓練模式,并在虛擬現實、運動反饋、精準康復方面做了有益創新。但本系統只針對上肢肩肘和下肢踝關節,未涵蓋手和腿的功能訓練。本設備在臨床上初步使用,顯示有較好的康復效果。下一步將增加手和腿部的訓練功能,并進一步驗證其臨床康復效果。
猜你喜歡
康復(2023年11期)2023-11-20 07:45:54
康復(2023年14期)2023-11-20 06:04:54
中老年保健(2021年4期)2021-08-22 07:08:14
護理與康復(2021年2期)2021-03-05 08:10:44
家庭醫學(下半月)(2020年1期)2020-05-11 02:05:46
廣東醫科大學學報(2020年6期)2020-02-06 06:00:56
特別健康(2018年2期)2018-06-29 06:13:44
反射療法與康復醫學(2017年7期)2017-01-16 01:11:02
中國衛生(2014年6期)2014-11-10 02:30:50
中國中醫藥現代遠程教育(2014年23期)2014-03-01 04:33:45