城市交叉路口交通信號優化控制研究
2019-07-25 04:01:32韓偉莉李炬
價值工程 2019年18期
韓偉莉 李炬
摘要:針對當前城市道路交通擁堵等問題,如何加強對交通的優化控制,是本文探討的重點。本文以交叉路口信號控制作為研究對象,提出一種模糊控制的交通信號優化方法。即以鄰交叉口進口道的繁忙度、綠燈相位繁忙度、紅燈相位緊急度作為輸入,通過模糊推理實現交通信號等的相位轉換,進而實現對該區域整體交通的優化。
Abstract: In view of the current urban road traffic congestion and other issues, how to strengthen the optimal control of traffic is the focus of this paper. In this paper, the intersection signal control is taken as the research object, and a fuzzy control traffic signal optimization method is proposed. That is to say, the busyness of the entrance of the adjacent intersection, the busyness of the green light phase and the urgency of the red light phase are taken as input, and the phase conversion of the traffic signal is realized by fuzzy reasoning, thereby realizing the optimization of the overall traffic of the area.
關鍵詞:交叉路口;信號控制;模糊算法
Key words: intersection;signal control;fuzzy algorithm
中圖分類號:U491.5+1? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻標識碼:A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文章編號:1006-4311(2019)18-0234-03
0? 引言
當前隨著我國城市車輛的大量增加,城市交通的智能化管理成為解決城市擁堵的一個重要途徑和方式。特別是在城市高峰期,在一些路段出現嚴重擁堵,甚至癱瘓的現象,這些嚴重制約著我國城市的高質量發展。同時在城市交通中,十字路口多,紅綠燈自然也多。因此,加強對這些十字路口紅綠燈信號的管控,對減少城市擁堵具有非常重要的作用和意義。目前,城市交通信號的控制主要還是固定配時控制,換句話說就是以歷史車流量大小來對通行時間進行分配。但是這種方法存在靈活性差,并且不能根據路況進行動態調節,所以在一定程度上造成了城市道路資源的浪費。同時,城市道路交通控制中,被人們認為是一個非線性、時變的系統,很難通過精確的控制模型進行控制。因此,人們引入模糊控制方法在城市道路交通信號中。但是模糊控制在應用中自身也存在問題,如車道數量和通行相位數目增加,公交車道的劃定等,都給城市交通控制帶來很多的不可確定性。另外,在實際的交通運行中,存在很多的異常情況,如交通事故等。但傳統的模糊控制沒有考慮這類異常情況,所以,本文在上述的基礎上,提出一種改善的方法,并對該方法的效果進行驗證。
1? 模糊控制原理
模糊控制的思想是把特定被控對象或者是某個過程按照IF或者是THEN的規則形式,按照模糊推理的方式進行控制。控制作用集為一組被量化的模糊語句,如“高”、“低”、“正常”等。在模糊控制中,包含控制器、反饋信號、對象等。具體控制過程如圖1所示。
在圖1中,S為設定值,e、c表示系統偏差和偏差變化率,E、C為經過模糊量化后的系統偏差和偏差變化率;U為經模糊推理后得到的控制作用。
2? 模糊控制器設計
2.1 區域交叉路口建模與控制思想
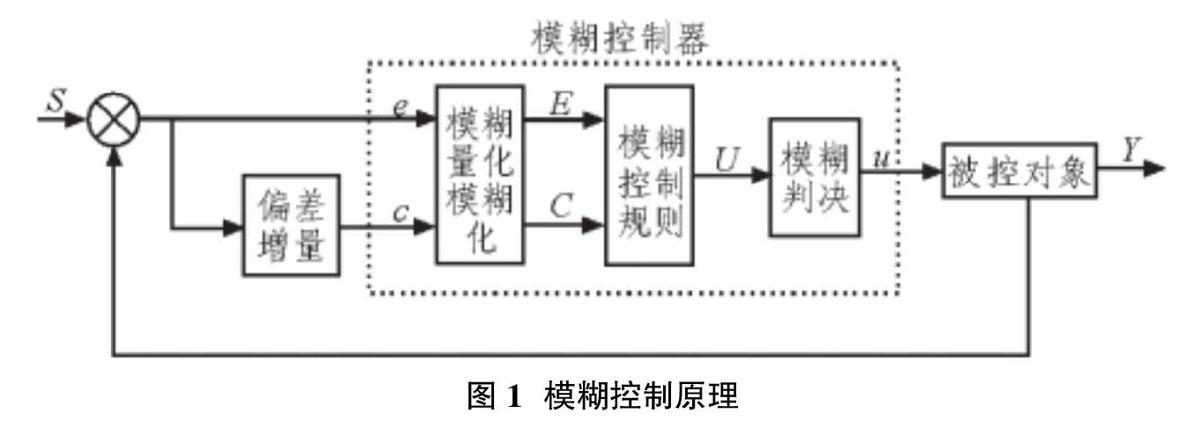
傳統的模糊控制是針對單交叉口的,但是實際運行中,城市運行大部分是以多交叉口為主。其中,區域交叉口路模型如圖2所示。
要實現對區域交叉路口交通信號的控制,需要結合圖1的區域交叉路口模型進行控制。而根據圖2看出,路口分為東、南、西、北四個不同的方向。在這四個方向中,都是按照直行車道和左轉車道進行設計。在每條車道的進車口位置都設置車輛檢測器,以此來獲取車輛的信息。同時,在每一條車道中,設置一模糊控制器,從而輸出當前相位車輛的緊迫度。通過測量,得到當前交叉口放行相位車輛的緊迫度、當前交叉口紅燈相位車輛的緊迫度、當前交叉口放行相位的下一個相鄰交叉口進口道上的車輛緊迫度。同時,通過路口車輛檢測器,可對車輛的速度進行測量。由此,通過上述的綜合信息,來判斷整體交通狀態。同時通過車輛檢測器檢測到的交通情況和控制器輸出的車輛緊迫度,度整體控制決策進行設計。而該決策控制模塊則決定是否進行相位轉換,也就是否決定紅綠燈信號是否切換。
2.2 模糊控制整體步驟
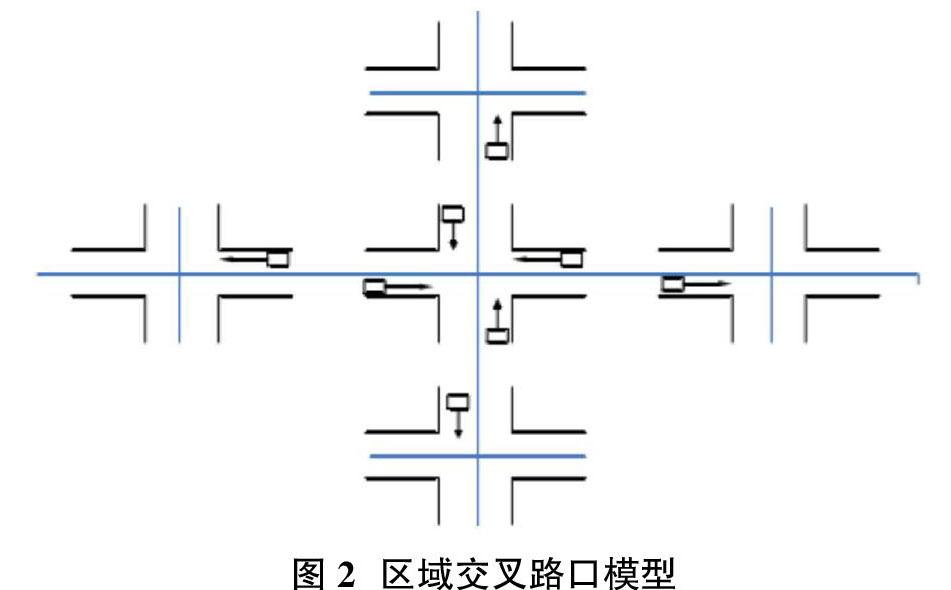
結合以上的思路,本文將整體的模糊控制思路設計為如圖3所示。即以道路采集到的相位緊迫度作為輸入,首先通過模糊控制的方法對交通數據進行初步采集和判斷,進而得到相鄰交叉口進口道的繁忙度、綠燈相位繁忙度+交通狀態、紅燈相位緊急度,然后在通過決策控制器模塊對該區域進行綜合判斷,進而調整交通信號。
在圖3中,綠燈相位繁忙度(Bu)是由綠燈相位的車輛排隊數BL和綠燈相位的車輛到達率BAR決定的。
BL=BL0+CB
其中,BL0、CB分別表示上一次綠燈結束時檢測區內剩余的車輛數和紅燈期間到達的車輛數。
紅燈相位的緊急度用Ru表示,由紅燈相位的車輛排隊數RL和紅燈相位的車輛到達率RAR決定。
RL=RL0+CR
其中,RL0、CR分別為上一次綠燈結束時檢測區內剩余的車輛數、紅燈期間到達的車輛數。
相鄰交叉口進口道的繁忙度Nu同樣由NL和NAR共同決定。
NL=NL0+CN
另外,考慮到交通中可能存在異常行為,如交通事故、臨時交通管制等,提出綠燈平均釋放時間,即AGDT,以判斷在非正常情況下的紅綠燈的分配時間。具體計算為:
AGDT(n)=α(CDT)+(1-α)AGDT(n-1)
其中,CDT表示車輛進入交叉口的綠燈釋放時間,AGDT(n-1)表示前平均綠燈釋放時間。
2.3 模糊控制規則設計
要實現對上述的模糊控制,就需要結合圖2中采集到的相鄰交叉口進口道的繁忙度、綠燈相位繁忙度、紅燈相位緊急度,以及本文提出的AGDT作為輸入參數,通過一定的模糊轉換,進而得到輸出量,即相位轉換決策信號JC。其中,JC的論域為{0,1},模糊化后,則為{轉,不轉},用{JC1,JC2}表示;隸屬度函數采用三角型隸屬度函數;Bu、Ru、Nu的論域為{0,1,2,3,4},模糊化處理后為{VD(較低),D(低),M(一般),H(高),VH(較高)}。同時考慮到本文引入的AGDT參數,分別設定在正常情況下和非正常情況下的控制規則,具體見表1和表2所示。
3? 仿真驗證
3.1 仿真建模
利用visio studio2012作為開發平臺,以VB作為開發語言,對以上算法進行編程,從而得到如圖4所示的交叉路口仿真模型。
3.2 仿真流程設計
根據上述的設計,將算法步驟描述如下:
Step1:初始化各參數,包括最大、最小綠燈時間,并從道路的任意相位開始;
Step2:檢測各個相位的車輛達到率和排隊數;
Step3:模糊控制器根據上述檢測得到的排隊數和車輛到達率,計算不同相位的相鄰交叉口進口道的繁忙度、綠燈相位繁忙度+交通狀態、紅燈相位緊急度,并計算AGDT;
Step4:將上述采集到的不同相位數據作為輸入,然后根據模糊推理,決定是否進行相位轉換;
Step5:若進行轉換相位,則轉到Step2;
Step6:若不進行相位轉換,則直接判斷綠燈相位通行時間是否最大,如最大,則轉換到緊迫度最大的下一相位,轉到Step2。如未達到最大,則就放行綠燈相位的車輛;
Step7:判斷仿真時間是否超時。如否,轉到Step2;如是,則計算車輛的平均延誤率,結束仿真。
3.3 參數設置
設定在異常情況下東西方向路況出現擁堵,南北方向行駛正常。車輛在交叉路口采用隨機分布,包括小轎車、公交車等不同車型。仿真時間50min。同時為對比本方法的效果,采用定時信號變化進行對比。定時控制下紅綠燈時間都設定為60s,本文采用方法的紅綠燈時間則根據上述的規則來定。由此通過上述的仿真,得到表3的對比結果。
通過上述的結果看出,本文構建的模糊控制算法在車輛平均等待時間上,要明顯少于定時控制方法,說明本文構建的方法與定時控制方法相比,具有一定的實用價值,對提高車輛通信的時間,具有很大的價值。
4? 結束語
通過對異常情況下區域交叉口交通信號控制的研究,考慮了相鄰交叉口的交通流信息,因此更有利于從整體區域的角度對交通進行控制。同時,通過仿真結果表明,本文采用的模糊控制方法在等待時間上,要明顯低于傳統的定時時間,說明本文方法的實用性和價值。
參考文獻:
[1]伍尚昆,陳翠宜,祝勝林.基于多種群蟻群算法的交叉路口信號配時優化[J].計算機應用與軟件,2014(3105):83-88.
[2]曹成濤.城市交叉口交通信號優化控制方法[J].西安工程大學學報,2016,30(14105):616-621.
[3]張曉.城市交叉路口單點信號優化控制配時策略研究[J].城市建設理論研究(電子版),2017(22313):60-61.
[4]王舒祺.現代有軌電車交叉路口優先控制管理方法研究綜述[J].城市軌道交通研究,2014,17(14106):17-22.
[5]景順利,王恒.有軌電車信號系統中的交通信號控制及顯示系統研究[J].現代城市軌道交通,2018(07):1-4.
[6]李佳澎.基于Petri網的無信號交叉口車輛誘導及優化系統研究[J].軟件導刊,2018,17(19008):21-27.
[7]吳黎兵,聶雷,劉冰藝,吳妮,鄒逸飛,葉璐瑤.一種VANET環境下的智能交通信號控制方法[J].計算機學報,2016,39(40206):1105-1119.
[8]黃攀,閆艷.不同交叉路口青年人過街特性的研究[J].農業裝備與車輛工程,2017,55(31207):78-81.
[9]郭新蘭,李濤.分布式區域交通信號自適應控制[J].自動化應用,2013,10:16-18,39.