低成本剛?cè)峤Y(jié)合三指機(jī)械手設(shè)計(jì)
2019-07-29 00:41:36劉粵
無線互聯(lián)科技 2019年9期
關(guān)鍵詞:設(shè)計(jì)
劉粵

摘? ?要:文章設(shè)計(jì)了一種可用于實(shí)際生產(chǎn)和生活的三指機(jī)械手設(shè)計(jì),并描述了其發(fā)明目的、具體結(jié)構(gòu)和工作原理。文章對于以往的機(jī)械手進(jìn)行了改進(jìn),使用了利用尼龍繩牽引的欠驅(qū)動設(shè)計(jì),達(dá)到了較小驅(qū)動元件驅(qū)動較多自由度的目的,并采用了3D打印技術(shù)硅膠材料,使得整個(gè)設(shè)備更為輕便,降低了設(shè)備的成本。以STM32F103ZET6單片機(jī)為處理核心,利用PWM輸出改變占空比實(shí)現(xiàn)對舵機(jī)的控制。在滿足機(jī)械手抓取和釋放物體的前提下,突出了欠驅(qū)動、輕便、成本較低、適用范圍廣的特點(diǎn)。
關(guān)鍵詞:三指機(jī)械手;欠驅(qū)動;3D打印;PWM輸出;占空比
1? ? 機(jī)械手發(fā)展簡介
早在20世紀(jì)70年代,世界上各個(gè)國家就開始了對機(jī)械手的研究,有不少的優(yōu)秀成果,例如日本的Okada多指智能手、美國斯坦福大學(xué)的Stanford/JPL多指智能手、美國麻省理工學(xué)院和猶他大學(xué)聯(lián)合研制的Utah/MIT手,這類早期機(jī)械手的研發(fā)已經(jīng)比較成熟。擁有多自由度的智能手已越來越接近人類的雙手,也具備了操作的靈活性以及運(yùn)轉(zhuǎn)的穩(wěn)定性。然而,使機(jī)械手具有足夠的靈巧程度的代價(jià)是需要使用大量大傳感器,導(dǎo)致了操作具有較高的復(fù)雜性,并隨之帶來成本高、周期長的問題。
相比國外領(lǐng)先的機(jī)械手研究,我國在20世紀(jì)80年代之前對于機(jī)械手領(lǐng)域的研究幾乎為0,20世紀(jì)80年代以后,許多研究機(jī)構(gòu)開始著手研究,取得了一定的成績。具有代表性的研究機(jī)構(gòu)包括中國科學(xué)院合肥智能機(jī)械研究所、清華大學(xué)、東北大學(xué)、哈爾濱工業(yè)大學(xué)等。為了解決“如何利用最少的驅(qū)動原件來驅(qū)動更多的自由度”的問題,不同的科研機(jī)構(gòu)采用了許多獨(dú)到的方法,東北大學(xué)利用多自由度差動的驅(qū)動原理,哈爾濱工業(yè)大學(xué)則采用動滑輪機(jī)構(gòu)、滑輪機(jī)構(gòu)設(shè)計(jì)了一種電驅(qū)動的三指機(jī)械手。但是產(chǎn)品仍舊存在關(guān)節(jié)數(shù)目多、結(jié)構(gòu)復(fù)雜、體積大、成本高的缺點(diǎn),因此,在國內(nèi)智能手的應(yīng)用并不夠廣泛,大多在大型的工業(yè)生產(chǎn)之中使用,難以貼近日常生活。
隨著經(jīng)濟(jì)的發(fā)展與社會的進(jìn)步,“科技貼近生活”的趨勢越來越強(qiáng)烈,如何將機(jī)械手的使用更好地推廣延伸到生活中的方方面面已經(jīng)成為大家思考的關(guān)鍵,只有解決了機(jī)械手結(jié)構(gòu)復(fù)雜、體積大、成本高的問題,機(jī)械手才有可能得到更加廣泛的應(yīng)用,更加貼近人們的日常,幫助人類提高工作效率,造福于人類的生活。針對這些問題,本項(xiàng)目設(shè)計(jì)了一種低成本剛?cè)峤Y(jié)合的三指機(jī)械手。
2? ? 機(jī)構(gòu)的運(yùn)動分析與結(jié)構(gòu)設(shè)計(jì)
通過對人手的分析發(fā)現(xiàn),人手使用最頻繁的3根手指為食指、拇指和中指,人手大部分的抓取等動作都是由這3根手指完成的,無名指和小指主要起輔助作用。要使該智能手能像人手一樣完成多種多樣的抓取任務(wù),就要求智能手和手指能夠像人手一樣靈活,能夠最大程度接近人手。但是考慮到設(shè)計(jì)和制造的復(fù)雜程度和成本問題,本設(shè)計(jì)在滿足以上要求的條件下,要求智能手結(jié)構(gòu)盡可能簡單,因此設(shè)定手指數(shù)目為3個(gè)。
本機(jī)械手所要實(shí)現(xiàn)的基本動作為手指彎曲和伸展。因此,確定設(shè)計(jì)出單自由度手指的簡要結(jié)構(gòu)(見圖1)。
所述手指部分包含近指節(jié)24、彈簧片23、遠(yuǎn)指節(jié)22、硅膠指墊21。手指部分通過銷軸固定在手指底座3上,手指和手指底座間在銷軸上安裝扭簧,用于固定手指和手掌間角度和實(shí)現(xiàn)手指的回彈作用,利用尼龍繩穿于手掌與手指之間,實(shí)現(xiàn)驅(qū)動。
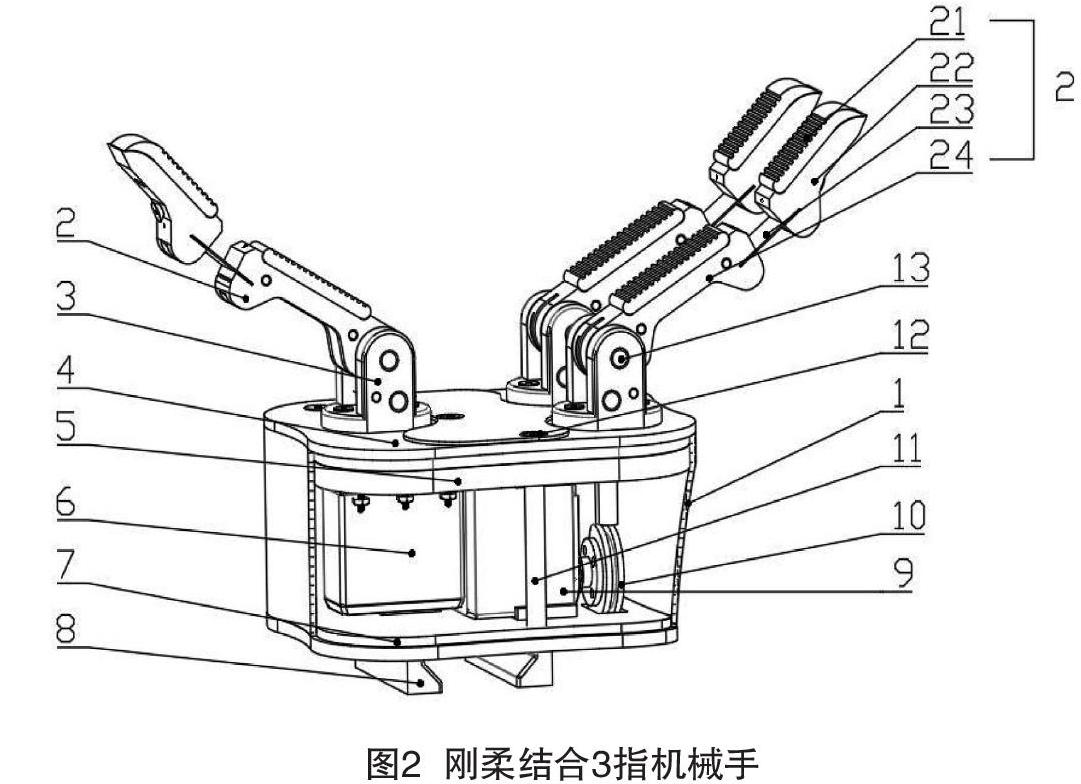
整體上,本文所設(shè)計(jì)的剛?cè)峤Y(jié)合三指機(jī)械手,包括3根手指、3個(gè)手指底座、手掌、機(jī)架部分(見圖2)。
所述手掌4用于安裝3個(gè)手指底座,如圖2位置3所示,其中,一個(gè)手指底座固定在手掌上,另外兩個(gè)手指底座與底部轉(zhuǎn)動機(jī)構(gòu)固定,可在手掌上轉(zhuǎn)動60°。
所述機(jī)架部分包含機(jī)架外殼1,機(jī)架上板5,機(jī)架下板7,一個(gè)轉(zhuǎn)動舵機(jī)6,3個(gè)抓取舵機(jī)9。所述手掌4,機(jī)架上板5,機(jī)架下板7,底板8通過雙通銅柱11和螺釘12固定,中間使用雙通銅柱11支撐。
3根手指均可繞銷軸旋轉(zhuǎn),通過設(shè)計(jì)使用扭簧定位和保證回彈,并且手指底座設(shè)計(jì)成一根固定,兩根可以轉(zhuǎn)動的結(jié)構(gòu),這樣的設(shè)計(jì)可以方便實(shí)現(xiàn)機(jī)械手在面對不同物體時(shí)變換不同的抓取姿勢,使機(jī)械手具有更好的形狀自適應(yīng)性和抓取效果,增大抓取范圍。
手指轉(zhuǎn)動通過尼龍繩驅(qū)動,驅(qū)動系統(tǒng)包括舵機(jī)9,滑輪10,尼龍繩。尼龍繩固定在滑輪上,向上穿過手掌和底座,按照一定的方式繞過手指,固定在手指遠(yuǎn)指節(jié)22上。通過舵機(jī)轉(zhuǎn)動,帶動固定在舵機(jī)上的滑輪轉(zhuǎn)動,尼龍繩收縮使手指彎曲。采用尼龍繩驅(qū)動使用了欠驅(qū)動的驅(qū)動方式,減少了驅(qū)動器的數(shù)量,使機(jī)械手結(jié)構(gòu)簡單。
手指底座3轉(zhuǎn)動由轉(zhuǎn)動舵機(jī)6驅(qū)動,所述轉(zhuǎn)動舵機(jī)固定在機(jī)架板上,舵機(jī)輸出軸接齒輪,通過一個(gè)傳動齒輪和一個(gè)轉(zhuǎn)向齒輪最終和兩個(gè)手指底座底部的轉(zhuǎn)動機(jī)構(gòu)相連,舵機(jī)轉(zhuǎn)動可以驅(qū)動手指底座帶動手指一起旋轉(zhuǎn),旋轉(zhuǎn)角度為0°~60°,可以針對不同形狀的物體,改變手指的排列方式,對物體有更好的抓取效果。
材料上,手指近指節(jié)和遠(yuǎn)指節(jié)指面上為硅膠指墊,采用硅膠灌注成型,表面為鋸齒型結(jié)構(gòu),可以增大摩擦力。使用柔性硅膠指墊,使手指具有柔性,抓取較軟或過硬物體時(shí)不易損傷物體和自身。手指模型通過3D打印形成,在硅膠指墊處預(yù)先留好指墊腔25,并且表面采用T型結(jié)構(gòu)26固定指墊。將液體硅膠灌注到指墊腔,成型后去除外殼,形成硅膠指墊。
近指節(jié)和遠(yuǎn)指節(jié)采用彈簧片固定連接,采用彈簧片彈性鉸鏈的優(yōu)勢在于,比傳統(tǒng)鉸鏈連接結(jié)構(gòu)簡單,易于實(shí)現(xiàn),并且具有較好的回彈效果。
底板下方設(shè)計(jì)有燕尾槽,用于安裝3指機(jī)械手,槽上有銷軸孔,用于固定,采用這種方式設(shè)計(jì),方便3指機(jī)械手的拆裝,比螺紋連接更加方便,同時(shí)具有較好的穩(wěn)定性。
3? ? 控制系統(tǒng)設(shè)計(jì)
3.1? 硬件電路設(shè)計(jì)
控制部分的整體結(jié)構(gòu)由機(jī)械手動作控制旋鈕、STM32單片機(jī)、驅(qū)動舵機(jī)運(yùn)轉(zhuǎn)的高壓電源、舵機(jī)電路模塊組成。控制按鈕是進(jìn)行調(diào)節(jié)的控制始端,通過外部中斷觸發(fā)中斷服務(wù)程序,開始計(jì)算占空比并進(jìn)行脈沖寬度調(diào)制(Pulse Width Modulation,PWM)輸出,舵機(jī)接收到PWM波并且旋轉(zhuǎn)到相應(yīng)角度。硬件電路的作用在于接收來自外界的控制信號并驅(qū)動機(jī)電結(jié)構(gòu)中的舵機(jī)。
主芯片采用STM32系列微處理器中的STM32F 103ZET6,STM32F103ZET6是STM32系列單片機(jī)的一種,芯片本身集成了模數(shù)轉(zhuǎn)換與PWM輸出等功能,可以直接進(jìn)行數(shù)據(jù)的采集和一定占空比PWM的輸出。
3.2? 控制原理
STM32F103ZET6芯片集成了模數(shù)轉(zhuǎn)換與PWM輸出等功能,可以直接進(jìn)行數(shù)據(jù)的采集和一定占空比PWM的輸出。PWM是對脈沖寬度的控制,是一種周期一定而高低電平的占空比可以調(diào)制的方波信號[1]。不同的占空比產(chǎn)生的不同PWM波信號輸出到舵機(jī),使舵機(jī)轉(zhuǎn)動到對應(yīng)的角度。
STM32F103ZET6中,內(nèi)置了多達(dá)4個(gè)可同步運(yùn)行的標(biāo)準(zhǔn)定時(shí)器,分別為TIM2,TIM3,TIM4和TIM5。每個(gè)定時(shí)器都有一個(gè)16位的自動加載遞加/遞減計(jì)數(shù)器、一個(gè)16位的預(yù)分頻器和4個(gè)獨(dú)立的通道,每個(gè)通道都可用于輸入捕獲、輸出比較、PWM和單脈沖模式輸出,在大的封裝配置中可多提供16個(gè)輸入捕獲、輸出比較或PWM通道。
在本設(shè)備中,利用定時(shí)器3產(chǎn)生一路PWM波控制手指1和手指2的彎曲,由定時(shí)器2來產(chǎn)生另一路PWM波控制手指3的彎曲,再由定時(shí)器4輸出一段PWM波控制手指2和手指3的相對角度。
4? ? 結(jié)語
4.1? 現(xiàn)有技術(shù)的缺點(diǎn)
現(xiàn)有技術(shù)采用關(guān)節(jié)數(shù)目多,結(jié)構(gòu)復(fù)雜,在不便于制造維護(hù)的同時(shí),又導(dǎo)致設(shè)備體積大、成本高,使產(chǎn)品在應(yīng)用推廣過程中受限。同時(shí),產(chǎn)品控制算法大多較為復(fù)雜,須由專人維護(hù)使用。
4.2? 本發(fā)明的特點(diǎn)
該設(shè)計(jì)在滿足實(shí)現(xiàn)機(jī)械手多狀態(tài)抓取、釋放物體功能的同時(shí),巧妙地采用尼龍繩牽引、舵機(jī)驅(qū)動的設(shè)計(jì)方案,具有欠驅(qū)動設(shè)計(jì)的特點(diǎn),能夠?qū)崿F(xiàn)利用較少的驅(qū)動原件,實(shí)現(xiàn)較多自由度的控制。采用STM32F103ZET6芯片進(jìn)行控制,控制方法簡單、合理,方便操作。同時(shí),使用3D打印技術(shù)和硅膠材料,在一定程度上縮小了成本,使設(shè)計(jì)產(chǎn)品較為輕便,靈活性高,有助于產(chǎn)品的推廣。此外,該設(shè)計(jì)的適用范圍極廣,具有較高的市場價(jià)值。
[參考文獻(xiàn)]
[1]洪俊峰,卜文強(qiáng),張榕鑫,等.基于STM32 PWM的正弦信號發(fā)生器設(shè)計(jì)[J].合肥工業(yè)大學(xué)學(xué)報(bào)(自然科學(xué)版),2014(2):188-191,224.
Abstract:This paper designs a kind of three-fingered manipulator which can be used in actual production and life, and describes its inventive purpose, concrete structure and working principle. The paper improves the previous manipulator, uses the underactuated design of nylon rope traction, realizes the purpose of driving smaller driving elements with more degrees of freedom, and uses the silica gel material of 3D printing technology, which makes the whole equipment more portable and reduces the cost of the equipment. With STM32F103ZET6 MCU as the processing core, the servo is controlled by changing duty cycle with PWM output. On the premise of satisfying the requirements of grasping and releasing objects by manipulators, the characteristics of under-actuation, lightweight, low cost and wide application range are highlighted.
Key words:three-fingered manipulator; underdrive; 3D printing; PWM output; duty cycle
猜你喜歡
河北畫報(bào)(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04