應用STL模型的敏感器視場遮擋區域分析方法
2019-07-31 08:05:08王裕夫裴勝偉黃華
航天器工程 2019年3期
王裕夫 裴勝偉 黃華
(中國空間技術研究院通信衛星事業部,北京 100094)
隨著衛星有效載荷技術的發展,衛星星表的產品越來越多,體積越來越大。特別是某些產品部件,例如可展開天線,在衛星發射時收攏在衛星艙板上,在軌時展開。展開后可能會對敏感器的視場造成遮擋。遮擋使敏感器視場減小,影響其正常工作,導致整星的姿態確定受到影響[1-3],為了在衛星設計初期綜合考慮整星的布局以及相應產品部件的結構形式,有必要研究星上產品部件對敏感器視場的遮擋問題。
針對衛星上的遮擋分析,文獻[4]采用計算機軟件SolidWorks,來分析遮擋物對敏感器視場的遮擋情況。文獻[5]提出一種用于軸對稱形狀組合體航天器的帆板遮擋分析方法。文獻[6]采用圖像檢測的方法分析了航天器太陽翼遮擋的情況。以上文獻中,遮擋分析主要是采用幾何分析,分析方法需要對位置關系以及遮擋部件單獨建模,遇到涉及轉動或者復雜的遮擋部件,人工操作工作量大,效率低,在定量給出敏感器視場所受遮擋的具體范圍及遮擋率方面存在一定困難。
本文將遮擋部件的三維模型轉化為STL網格化數據(STL是美國3D System公司1988年開發的用于快速成型制造技術的表面模型數據交換標準[7-8]。),然后對遮擋部件的STL網格化坐標數據進行處理后,與敏感器視場范圍均轉換成平面夾角數據,將部件的遮擋問題轉化為判斷網格坐標點位置范圍的問題。STL網格化數據可以直接從實際部件的三維模型得到,包含了分析遮擋所需的全部幾何數據,無其它冗余信息。采用STL網格化數據后,可以適應星上所有產品遮擋敏感器視場的分析,在對各種布局情況分析時,可以避免以往分析方法的反復、復雜建模過程,顯著提高工作效率,便于進行工程設計,可有效的應用于敏感器視場遮擋分析。
1 視場遮擋區域分析
本文提出的遮擋分析方法主要由3部分組成:數據提取、數據處理、數據分析。如圖1所示。其中,數據提取部分是將遮擋部件的三維模型轉化為STL網格化模型文件,并提取出遮擋部件的STL網格化數據;數據處理部分是將遮擋部件的STL網格化坐標數據進行處理后,與敏感器視場范圍均轉換成平面夾角數據;數據分析部分則是將遮擋部件的平面夾角數據與敏感器視場范圍的平面夾角數據進行對比,分析敏感器視場被部件遮擋的情況,并繪制敏感器視場遮擋圖,計算遮擋率。
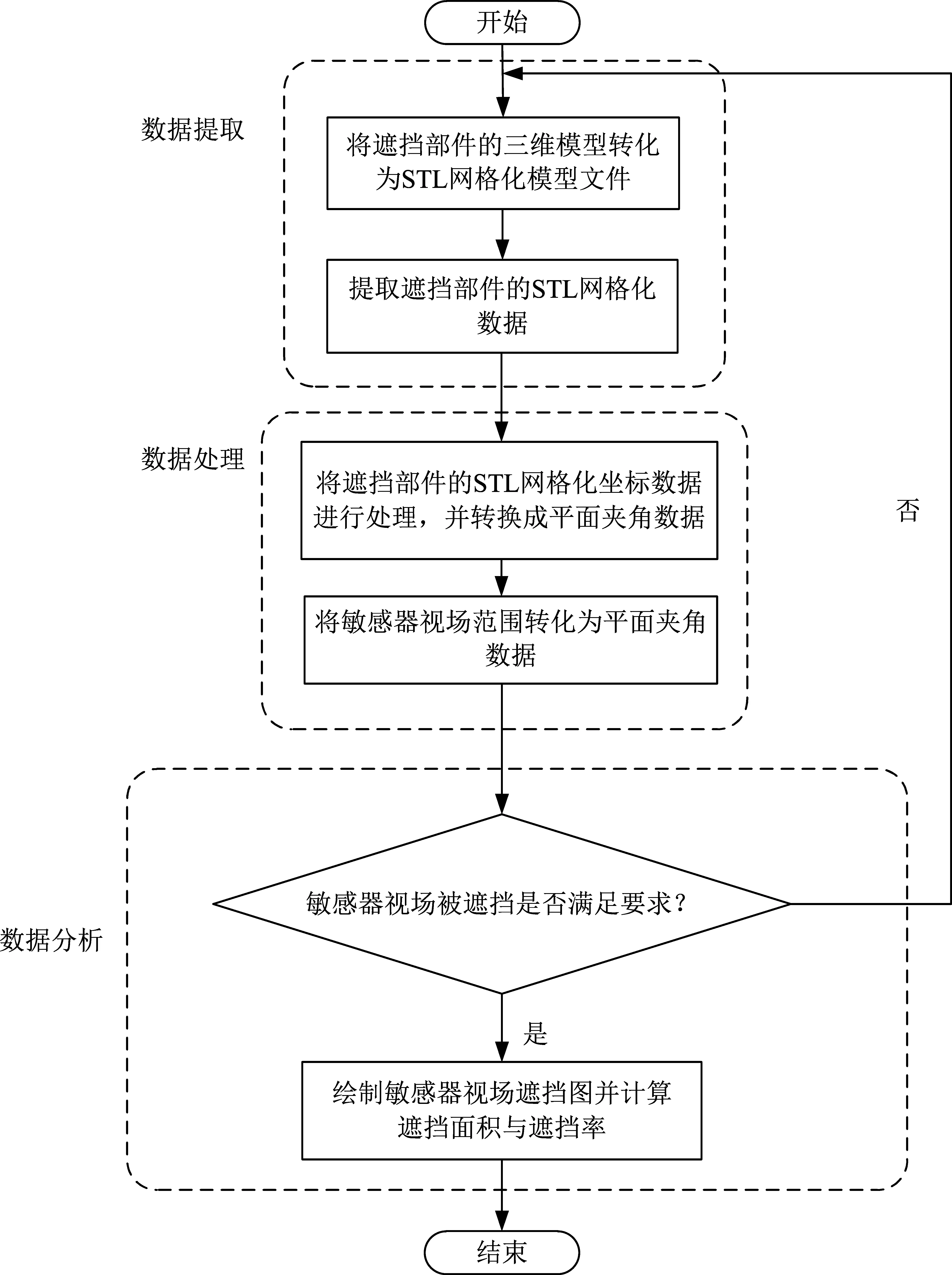
圖1 敏感器視場遮擋分析流程圖Fig.1 Flow chart of the occlusion analysis of optical sensor
1.1 數據提取
1)STL簡介
目前,CATIA、Pro/E等三維建模軟件均能輸出以STL表示的三維實體模型,該模型是利用空間三角形的拼接來對原有三維模型表面進行逼近的數學模型,每個三角形用3個頂點來表示,每個頂點采用(x,y,z)來定位。另外,STL數據中還包含每個三角形的法向矢量數據。STL文件的美國信息交換標準代碼(American Standard Code for Information Interchange,ASCII)格式數據如下:
solid STL文件開始
facet normalxyz三角形開始,三角形法向矢量
outer loop
vertexx1y1z1三角形第一點坐標
vertexx2y2z2三角形第二點坐標
vertexx3y3z3三角形第三點坐標
endloop
endfacet 三角形結束
各個三角形信息
endsolid STL 文件結束
上述數據格式中,x、y、z反映了三角形法向矢量與基準坐標系(生成STL時選擇的坐標系)3個坐標軸的夾角。x1、y1、z1、x2、y2、z2、x3、y3、z3分別為三角形三個頂點在基準坐標系下的坐標值。詳見圖2所示。

圖2 STL數據中的三角形網格示意Fig.2 Triangle mesh of STL data
2)遮擋部件的STL網格化數據提取
為考慮衛星上真實的遮擋部件和敏感器視場的實際情況,采取的方法為:由遮擋部件的三維模型提取STL網格化數據。后文的模型均假定遮擋部件的三維模型與衛星上實際應用產品一致。
在三維模型中,選取敏感器視場的坐標系作為參考坐標系,這樣生成的STL網格化數據中的矢量和位置信息均相對于敏感器視場。提取得到的遮擋部件的STL網格化模型文件中三角形網格頂點的位置信息,將頂點i的位置信息以直角坐標系的坐標形式存為(xi,yi,zi),其中i為1~n,n為所有頂點的總數。
1.2 數據處理
首先,將數據提取得到的所有遮擋部件的三角形網格頂點i的坐標(xi,yi,zi)利用公式
(1)
(2)
轉換成遮擋部件的三角形網格頂點i與敏感器視場中心點O的連線與xz平面的夾角αi和遮擋部件的三角形網格頂點i與敏感器中心點O的連線在xz平面的投影線段與x軸的夾角βi,將所有頂點對應的夾角以平面坐標的形式存為(αi,βi),得到遮擋部件的平面夾角數據;所述的(x0,y0,z0)為敏感器中心點坐標。敏感器視場示意圖見圖3。

圖3 敏感器視場示意圖Fig.3 View field of optical sensor
以上數據處理及遮擋圖繪制利用自編程序快速實現。
2 計算應用
設定某遮擋部件以及敏感器視場參數后,在三維建模軟件中完成三維模型的建模,遮擋部件進入敏感器視場錐域,對敏感器視場產生了遮擋,如圖4所示。然后按照圖1所示流程分析敏感器視場所受遮擋的情況。根據圖1所示流程,在分析敏感器視場遮擋區域時需要3個輸入條件:遮擋部件的STL網格化數據、敏感器視場范圍以及遮擋部件與敏感器之間的相互位置關系。
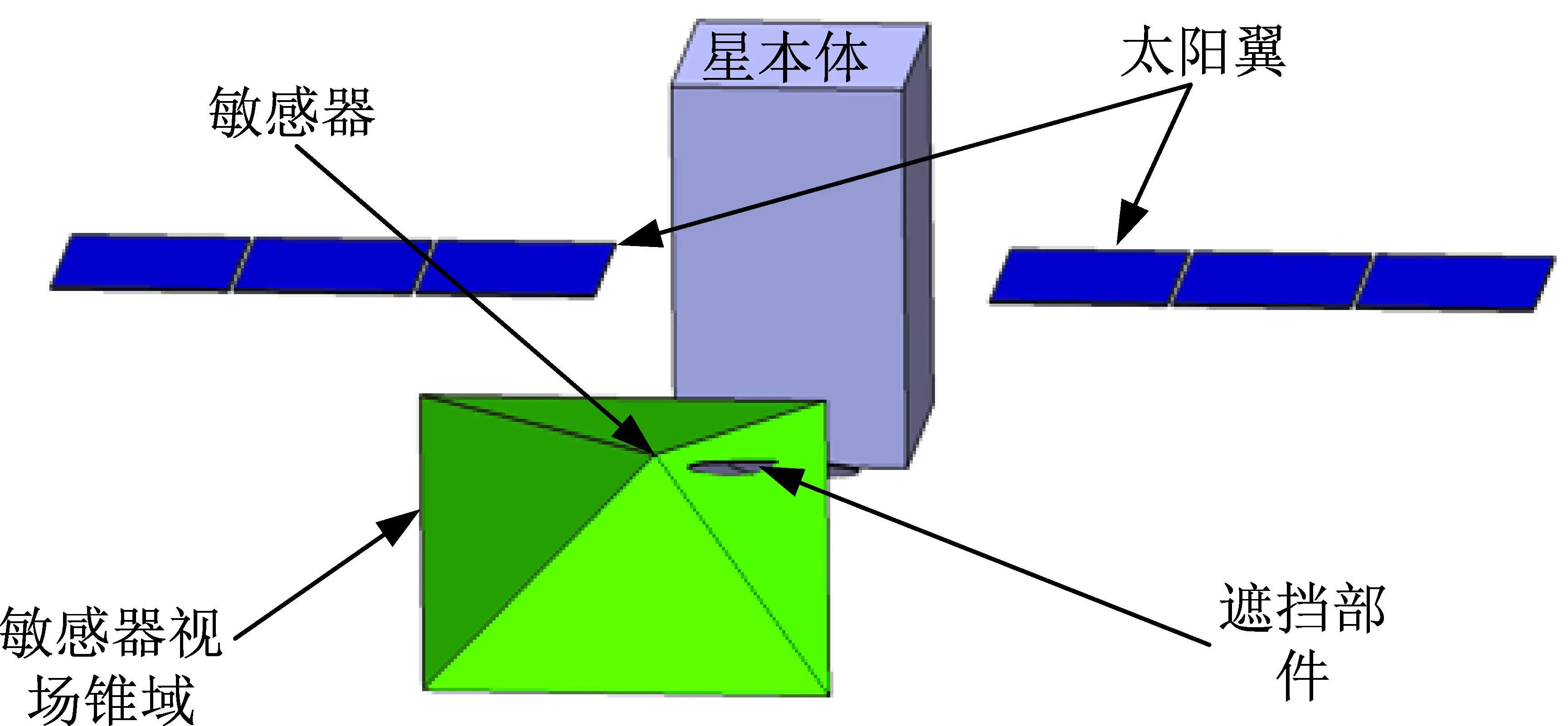
圖4 遮擋部件對敏感器視場的三維遮擋示意圖Fig.4 3D Pictures of the occlusion view field
以有效視場為±60°×±60°的某敏感器受某部
件遮擋為例進行計算分析。計算得出遮擋率K為17.83%,其視場遮擋圖如圖5所示,陰影區域為視場被遮擋部分,從圖5中可以分析出,敏感器視場的第一象限遮擋的最嚴重,第二象限有少部分被遮擋,第三、四象限則未被遮擋。這種情況下,敏感器由于受遮擋嚴重,不能夠正常工作。因此,對該部件與敏感器的位置關系進行優化,再次計算遮擋率K為1.02%,調整后遮擋圖如圖6所示。從圖6中對比可以看出,位置優化后幾乎無遮擋,敏感器能夠正常工作。
本次優化如果采用常規方法進行二次建模分析,整個時間至少需要一個工作日,而利用本文方法進行位置優化后的視場遮擋再分析,花費工作時長不到1 h,證明本方法切實高效。
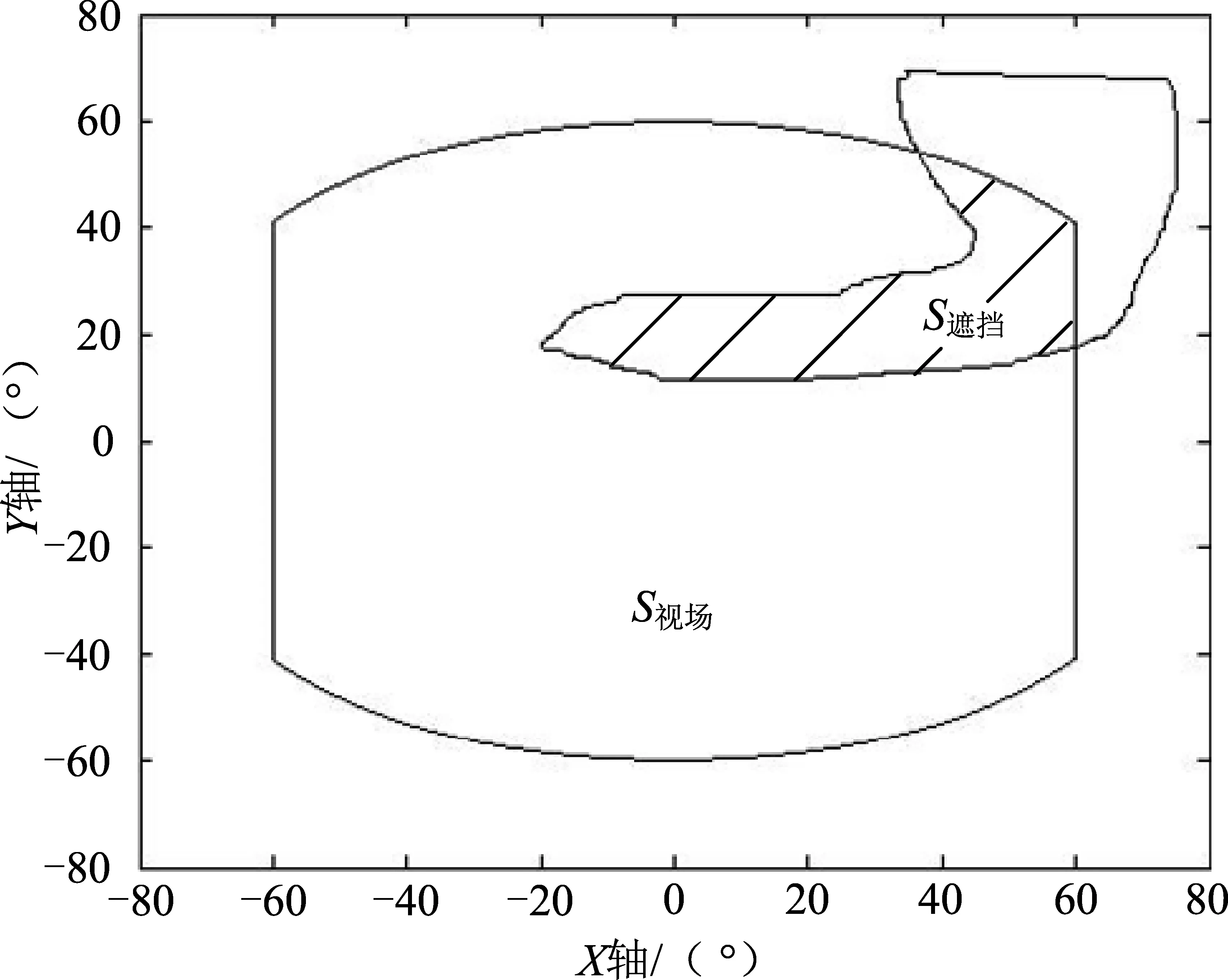
圖5 遮擋部件對敏感器視場的遮擋圖Fig.5 Pictures of occlusion view field
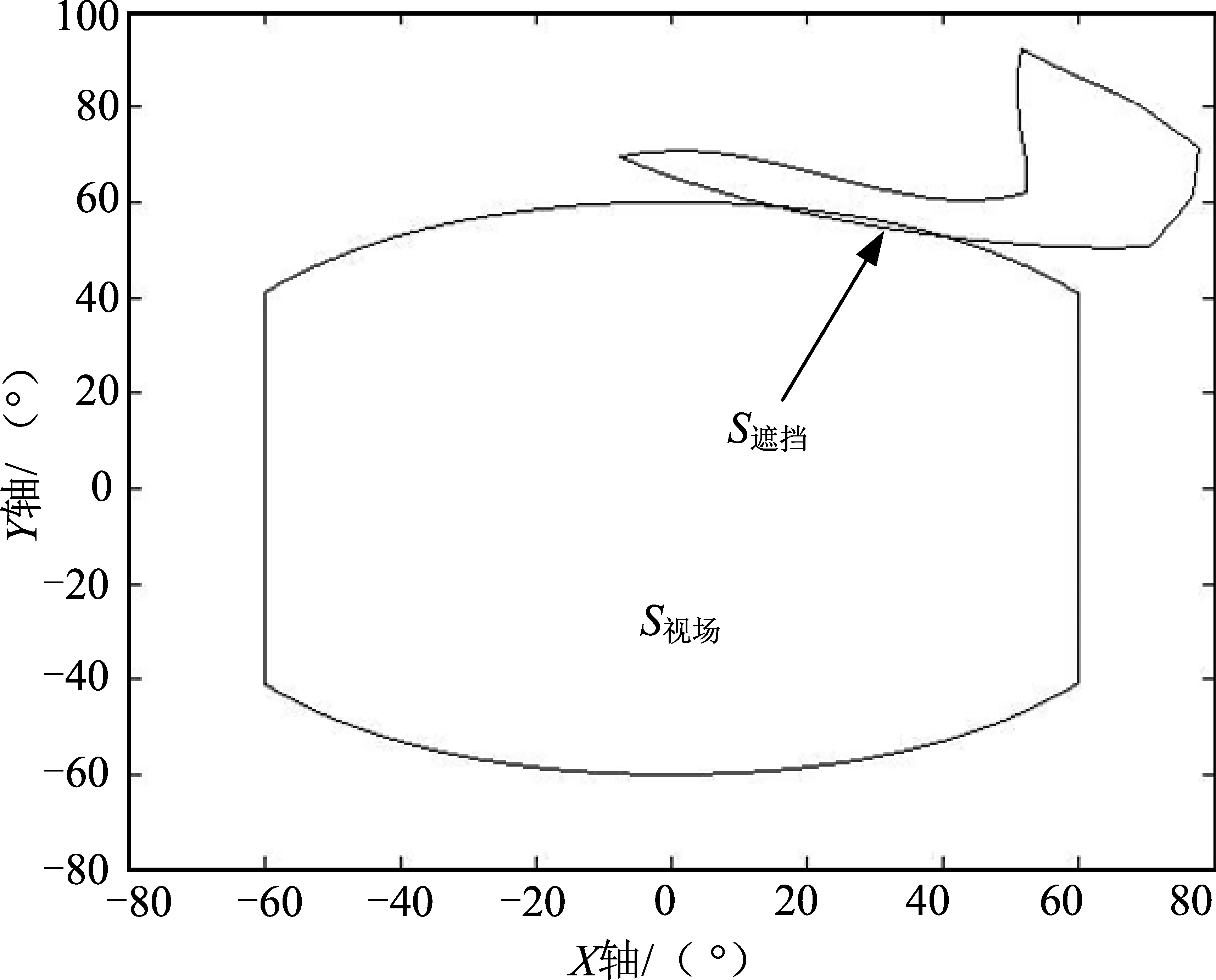
圖6 遮擋部件對敏感器視場的遮擋圖(優化后)Fig.6 Pictures of occlusion view field(after optimization)
3 結束語
針對衛星上的遮擋分析問題,本文提出了一種基于STL網格化模型的敏感器視場遮擋區域確定方法。對于某種靜態的敏感器與遮擋部件位置狀態,此方法首先是將遮擋部件的三維模型轉化為STL網格化模型文件,并提取出遮擋部件的STL網格化數據。然后將遮擋部件的STL網格化坐標數據進行處理后,與敏感器視場范圍均轉換成平面夾角數據。之后,則將遮擋部件的平面夾角數據與敏感器視場范圍的平面夾角數據進行對比,定量給出敏感器視場所受遮擋的詳細分布范圍以及遮擋率,相比以往方法,顯著提高了工作效率,便于工程設計。針對活動部件在運動過程中的遮擋分析,可以選取運動過程中的某些典型位置進行分析,以增強本方法的適應性。可作為衛星研制工作中敏感器視場遮擋分析的有效手段。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06