核電大型設備吊裝及運輸智能仿真系統的開發及應用
2019-07-31 06:08:42
石油化工建設 2019年3期
中核機械工程有限公司 浙江海鹽 314300
1 引言
隨著國家核電技術的快速發展以及核電站建設規劃的逐步落實,核電大型設備的種類更加豐富,模塊化程度越來越高,使得吊裝及運輸難度逐漸升級。核電大型設備吊裝及運輸施工作業由于影響因素多、責任重大,高風險是其主要特征,需要精心組織方可完成。吊裝及運輸過程安全質量控制取決于施工方案的可靠性。施工過程必須嚴格按照施工方案開展,才能確保核電大型設備順利運輸及吊裝就位。
編制吊裝、運輸施工方案是一項系統工程,前者涵蓋了施工場地地基處理、吊點布局、吊索具設計、起重吊裝設備選型、吊裝工藝設計、質量安全保障等;后者涵蓋了工裝設計、運輸車選型、運輸路線選取、運輸過程控制、質量安全保證等。而傳統吊裝及運輸方案的設計計算和機械設備選型以手工為主,受人為影響大,極易出現偏差;設計方式以二維圖呈現,雖然在一定程度上解決了空間預想的問題,但是沒有將吊裝運輸過程可視化,也沒有解決整個施工作業實施過程中的三維空間架構的問題。這樣編制出的施工方案很難滿足可靠、可行的要求。
隨著計算機技術以及虛擬現實技術的快速發展,利用計算機技術搭建虛擬場景進行吊裝運輸仿真,利用計算機速度快的優勢提高運輸方案編制的效率,同時利用計算機計算結果的唯一性和準確性實現施工作業標準化均已成為可能。目前計算機輔助設計已經能夠實現吊裝運輸過程可視化、智能化,最終將實現核電大型設備吊裝及運輸方案的自動編制和標準化。
2 系統總體概述
2.1 框架結構
核電大型設備吊裝及運輸智能仿真系統分為四大功能模塊,即數據庫模塊、虛擬仿真模塊、校核計算以及輸出模塊,其總體框架如圖1所示。
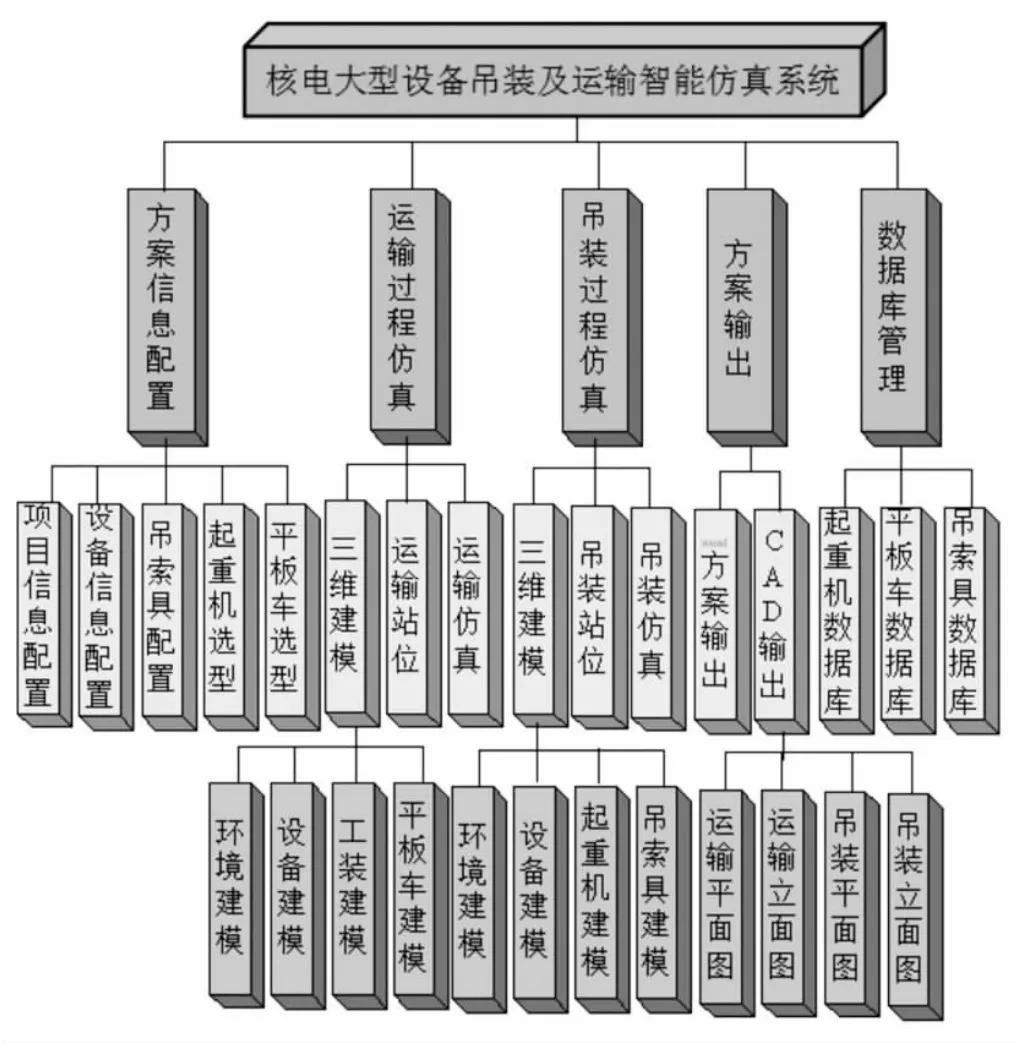
圖1 核電大型設備吊裝及運輸智能仿真系統框架圖
2.1.1 數據庫模塊
數據庫模塊是其他模塊工作過程中所需數據的提供者,同時也是虛擬仿真模塊所需吊裝/運輸方案的提供者。
吊裝關聯數據庫具體分為4個部分:起重機外形尺寸數據庫、起重機起重性能數據庫、起重機部件相對重心數據庫及輔助設備數據庫。運輸關聯數據庫中仍分為4個部分:運輸車外形尺寸數據庫、運輸車單個模塊性能數據庫、運輸工裝數據庫、運輸車模塊重心數據庫。數據庫模塊中提供兩個主要的操作:吊裝/運輸方案的生成和后臺數據庫的管理。吊裝/運輸方案生成是根據用戶輸入的工況要求及一些限制條件,系統自動地搜索起重機性能數據庫/運輸車性能數據生成一組滿足工況要求的吊裝/運輸方案。后臺數據庫管理主要負責管理系統中的各種參數。
2.1.2 虛擬仿真模塊
虛擬仿真模塊負責起重機、運輸車、作業環境和吊裝/運輸設備的三維模型顯示以及吊裝/運輸仿真控制。
作業環境和吊裝/運輸設備的三維建模與顯示有兩種方式:一種方式是利用其他商業三維建模軟件(如3DSMAX9)建立作業環境或吊裝/運輸設備模型,并保存為文件,系統通過導入該文件提取其中的三維信息數據送給渲染引擎生成三維吊裝/運輸作業環境或吊裝/運輸設備顯示在三維虛擬場景中;另一種方式是,自主開發一個二維草繪畫板,用戶在二維草繪畫板繪畫二維的作業環境或吊裝/運輸設備,并補充其三維信息,然后把這些三維信息送給渲染引擎進行三維建模與顯示。
吊裝/運輸設備的三維建模是根據選定的吊裝運輸方案從外形尺寸數據庫中提取出對應的設備外形參數送給渲染引擎生成逼真的三維設備模型。
三維渲染引擎是虛擬仿真模塊的核心,其設計與實現也是仿真系統的一個重點和難點。虛擬仿真模塊除了提供三維建模和顯示功能,還為用戶提供人機交互的接口,用戶通過人機接口可以控制吊裝運輸仿真,實現對現實世界中吊裝運輸作業的模擬。
2.1.3 校核計算模塊
校核計算部分包括平衡梁校核計算、索具校核運輸工裝校核計算。系統的校核計算功能取代了目前手工的校核計算,減少了手工計算的錯誤,節省校核計算的時間,為用戶設計或選擇輔助設備提供參考依據。
2.1.4 輸出模塊
輸出模塊主要包括以Word文檔格式輸出校核計算書、起重機/運輸車占位和立面AutoCAD圖、吊裝設備的AutoCAD圖,以及其他吊裝/運輸仿真的結果,如仿真錄像等。從而為制定吊裝/運輸方案提供可靠的素材和依據,指導吊裝/運輸作業的實施。
2.2 關鍵技術
2.2.1 三維空間可視化技術
三維空間可視化技術是提升吊裝/運輸工藝設計手段的重要因素。目前國外已形成多款商業及非商業三維虛擬引擎,例如OGRE是國外某團隊開發的開源三維虛擬引擎,可以實現二次開發,能夠滿足大型設備吊裝及運輸三維空間可視化的應用要求。
核電大型設備吊裝及運輸三維空間可視化應用在作業設計時,應滿足:
(1)吊裝/運輸過程可視化。可實現以起重機位姿驅動整個吊裝過程的可視化,以運輸車動作驅動整個運輸過程的可視化,滿足核電大型設備從初始位置到設備指定停放位置再到設備就位位置的整個施工過程的可視化。
(2)關鍵技術和參數實時顯示。在吊裝/運輸作業過程中,除受三維空間因素影響外,還需要考慮起重機和運輸車輛負載率是否滿足要求。本研究可實現三維空間中起重機和運輸車輛額定載荷、實際載荷及負荷率、實時計算和顯示,為吊裝和運輸作業提供最直接的數據參考。
(3)碰撞檢測和最小距離計算。在吊裝和運輸作業過程中運輸車輛、大型設備與周圍障礙物之間,起重機臂桿與大型設備及周圍障礙物之間是否碰撞以及它們之間的最短距離是多少,是方案設計人員始終關注的技術問題。本研究采用基于穿透率的廣義/狹義二階段碰撞檢測算法和基于三角形網格的精確距離計算方法,實現碰撞檢測和最小距離計算。
2.2.2 通用數據庫和模型庫的設計
核電大型設備吊裝/運輸方案編制中需要用到大量的數據,本系統從技術管理的角度研發實現了數據庫的設計和模型庫的設計,將二維圖形、三維模型、數據庫通過數據流進行統一:
(1)起重機數據庫設計;
(2)運輸車數據庫設計;
(3)核電大型設備數據庫設計,本系統整理并歸納了AP1000、高溫氣冷堆等堆型的大件被運輸設備,設計核電大型設備數據庫;
(4)相關二維圖形庫,為提高圖形輸出效率,本研究將起重機、運輸車、大型設備形成二維圖形庫,二維圖形庫與數據庫尺寸保持一致,輸出時根據吊裝/運輸方案自動調用進行輸出;
(5)相關三維模型庫,為實現三維虛擬空間搭建,本研究設計并實現了基于參數化驅動三維空間模型的建立。
2.3 系統功能描述
(1)實現起重機的智能選型;
(2)實現運輸車輛的智能選型;
(3)實現核電大型設備的參數化建模;
(4)實現核電大型設備吊裝過程、運輸過程三維仿真,實現交互式的運動狀態控制,并實現狀態信息顯示及臨界報警;
(5)實現吊裝仿真過程中接地比壓值的實時顯示;
(6)實現仿真過程中的實時碰撞檢測和最小距離計算;
(7)實現對操作過程的記錄和回放;
(8)實現起重機作業工況、計算書、吊裝站位圖、吊裝立面圖的輸出;
(9)實現運輸車輛作業工況、運輸站位圖、運輸立面圖的輸出;
(10)實現數據的實時更新及統一維護和管理。
3 應用實例
采用過去成功吊裝及運輸案例來驗證系統的有效性和實用價值。擇取海陽核電項目中的典型設備CA01的運輸和吊裝進行模擬為例,CA01結構模塊參數見表1。

表1 CA01結構模塊參數
CA01模塊在CA組裝場地完成整體組裝工作,組裝完畢后由CA組裝場地運輸至核島指定區域卸車,并吊裝至核島反應堆廠房內,運輸距離為1.3km左右。
3.1 CA01運輸
3.1.1 數據輸入
首先,輸入被運輸設備CA01模塊的詳細參數,包括尺寸、重量、設備重心等參數(圖2)。其次,進行運輸車輛信息配置,CA01模塊采用兩排液壓平板車組,第1組采用4個基礎軸線拼裝(圖3),額定載荷為840t,平衡配重100t,加固件重10t;第2組采用4個基礎軸線拼裝(圖4),最大凈載重為960t,平衡配重為100t,加固件重為10t。
3.1.2 負荷率校核
根據實際運輸中CA01模塊的重心分布情況,對第一、二組平板車負荷率進行校核。
3.1.2.1 第一組平板車負荷率校核
負荷率=(貨物重量×D2/(D1+D2)+平衡配重+加固件重)/額定載荷=(956.11×16491.5/28271+100+10)/840=55.56%
由計算可知,第一組平板車負荷率為55.56%,安全。
3.1.2.2 第二組平板車負荷率校核
負荷率=(貨物重量×D1/(D1+D2)+平衡配重+加固件重)/最大凈載重=(956.11×11779.5/28271+100+10)/960=63.48%
由計算可知,第二組平板車負荷率為63.48%,安全。
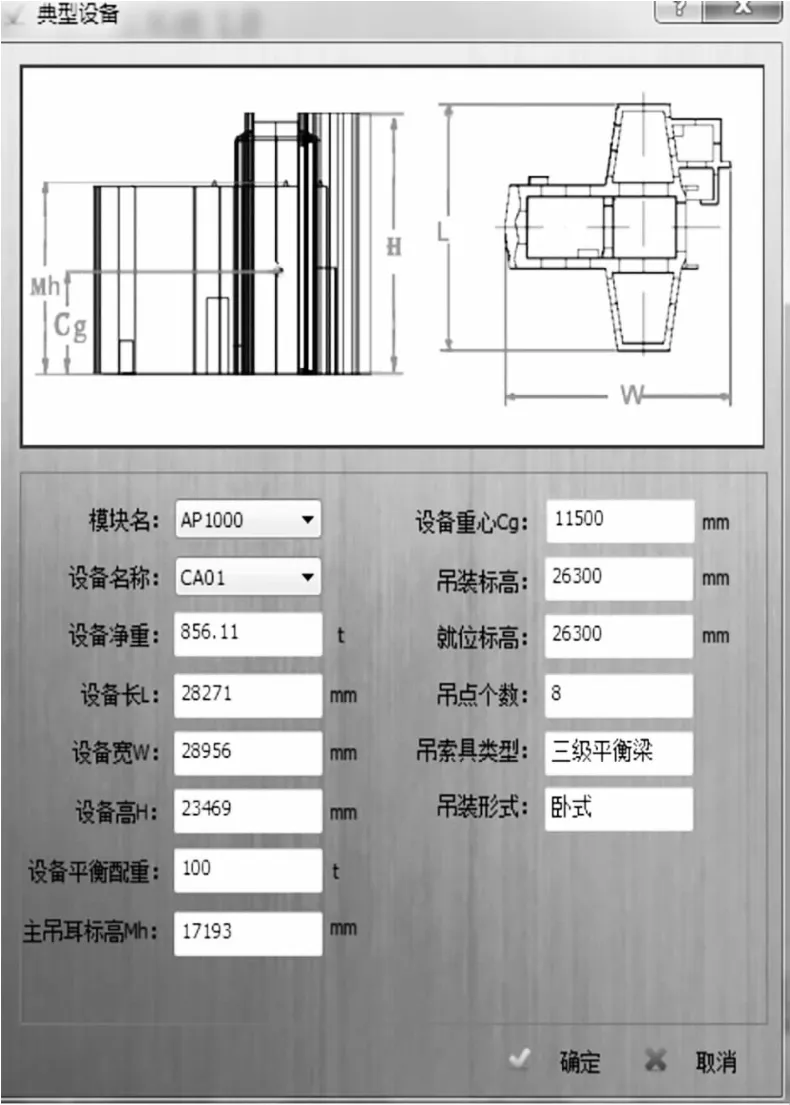
圖2 CA01設備參數

圖3 第1組運輸車數據
3.1.3 運輸仿真
從后臺數據庫中調取CA01設備模型、工裝模型、運輸車模型、AP1000場景模型,也可由外界建好按比例導入。進入運輸仿真界面,設置好初始站位(圖5),系統實現運輸路徑規劃(圖6),設置運輸動作(直行、轉彎);設備按照輸入的動作進行仿真,最后自動輸出仿真視頻和運輸方案信息(圖7)。

圖4 第2組平板車數據

圖5 運輸站位

圖6 運輸路徑規劃
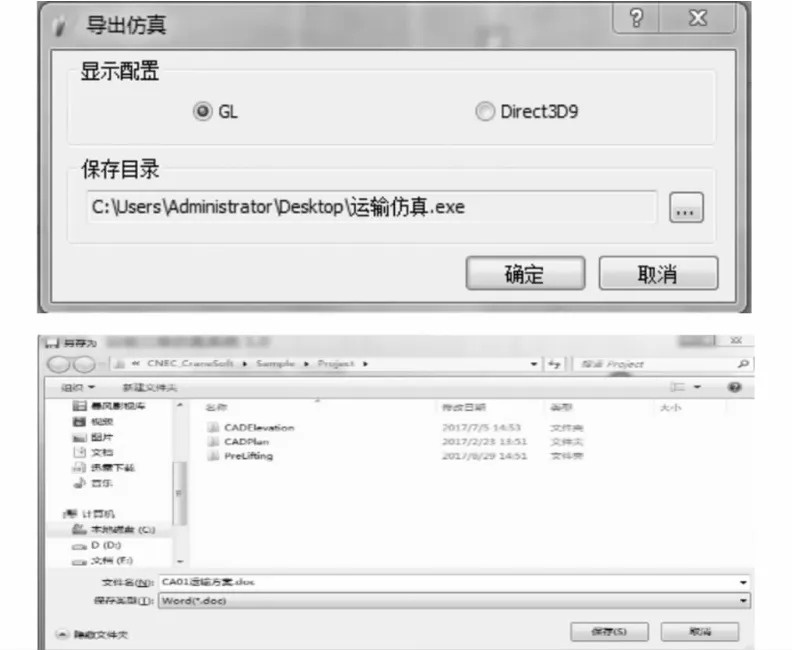
圖7 輸出仿真視頻和運輸方案信息
3.2 CA01吊裝
吊裝與運輸作業仿真的區別在于配置和動作設置上。
吊裝仿真需配置吊索具,本系統為擴大通用性,對吊索具進行了標準和專用(圖8)兩種分類。
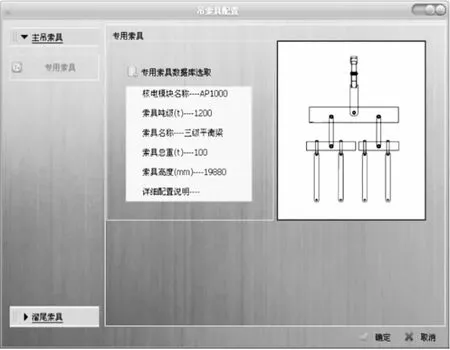
圖8 專用吊具選擇
對于起重機選型,可手動選擇工況,系統自動校核負載率,也可通過設置條件使系統自動篩選出符合條件的工況。起重機動作設置分為起鉤、落鉤、起重機行走(直行、十字行走)、回轉等(圖 9、10、11),設置完成后系統在三維環境中完成CA01的吊裝,過程中可實時顯示吊裝工況信息、對地壓力、最小凈距顯示和碰撞檢測(圖 12、13)。
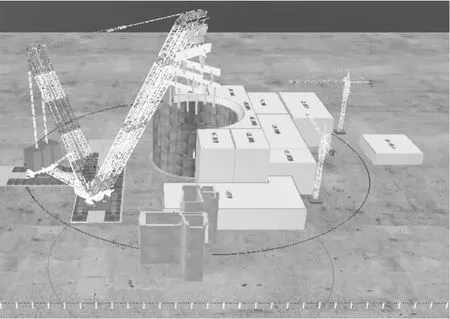
圖9 CA01吊裝場景導入
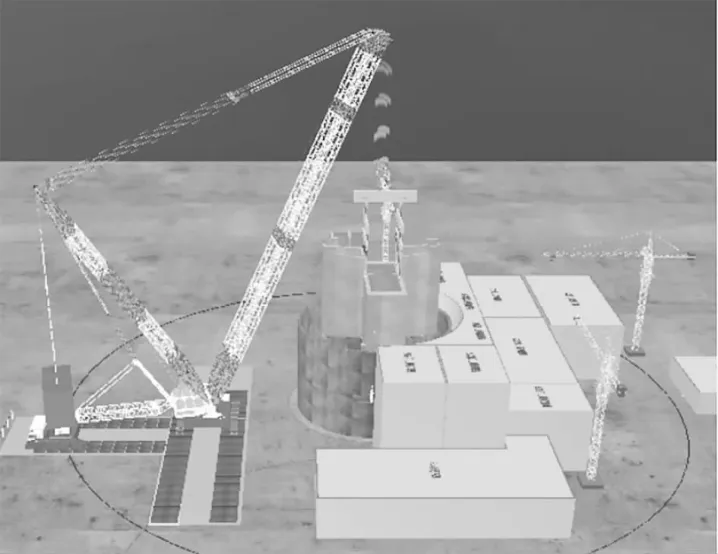
圖10 CA01吊裝回轉
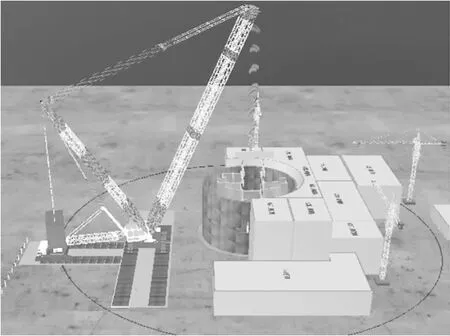
圖11 CA01就位
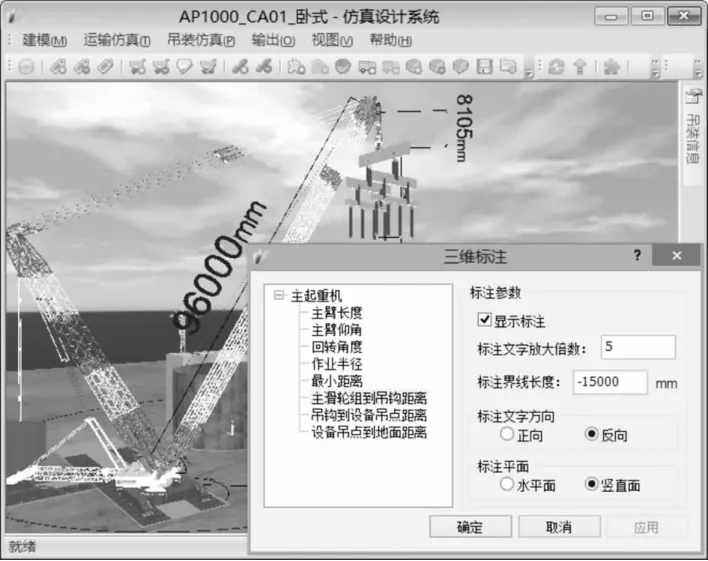
圖12 三維實時標注
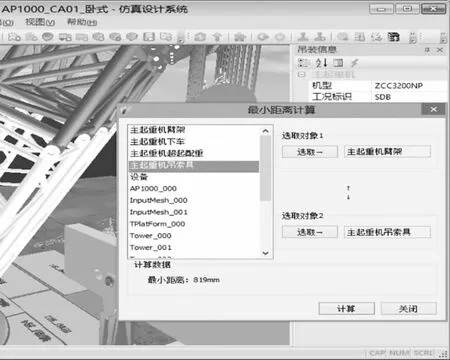
圖13 最小凈距顯示
經過CA01運輸和吊裝作業的仿真,系統輸出方案與實際方案作業過程一致,計算結果一致,工況相符,經驗證可行,具備實際施工指導意義。
4 結論
本系統從吊裝及運輸方案的編制、三維仿真模擬等方面掌握核心技術,改進原有大件設備吊裝及運輸方案的平面編制方法,實現設備吊裝及運輸前三維仿真模擬、吊索具校核計算,方案自動生成、吊裝及運輸最小凈距顯示及干涉檢測等,從而進一步提高吊裝、運輸方案的自動化編制水平,實現核電吊裝運輸方案的可視化展示,實現核電吊裝運輸一體化,彌補了吊裝及運輸工程方案信息配置可視化的空白。本系統已開發完成并成功應用于多項核電、石化領域吊裝運輸施工中。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
電子制作(2018年11期)2018-08-04 03:26:08
財經(2017年2期)2017-03-10 14:35:35
故事大王(2016年7期)2016-09-22 17:30:08
財經(2016年15期)2016-06-03 07:38:02
工業設計(2016年12期)2016-04-16 02:52:00
財經(2016年3期)2016-03-07 07:44:46
財經(2016年6期)2016-02-24 07:41:51
消費者報道(2014年7期)2014-07-31 11:23:57