原子干涉重力測量技術(shù)研究進展及發(fā)展趨勢
2019-08-01 02:24:44李嘉華姜伯楠
導(dǎo)航與控制 2019年3期
關(guān)鍵詞:測量
李嘉華,姜伯楠
(1.中國航天科技集團有限公司量子工程研究中心,北京100094;2.北京航天控制儀器研究所,北京100039)
0 引言
高精度重力測量在地表的重力場模型建立與完善、物理常數(shù)G的測定、自然災(zāi)害預(yù)警、礦物勘探、大地水準面繪制、慣性導(dǎo)航與定位等諸多領(lǐng)域有著廣泛的應(yīng)用。作為測量重力值的儀器,重力儀的種類很多,原理也不盡相同,但目前基本可以分為絕對重力儀和相對重力儀兩種類型。石英彈簧和零長彈簧的相對重力儀的測量靈敏度能夠達到10-9g/Hz1/2,但其會因彈性疲勞而引發(fā)零點漂移[1-2];超導(dǎo)重力儀的測量靈敏度可達10-9g/Hz1/2,但其體積大,可移動性差[3]。相對重力儀存在固有漂移,需要頻繁地進行校準,且校準需要同時獲取定位信息和本地重力值;絕對重力儀測量的是絕對重力值,其原理是等時間間隔測量3次自由落體的位移,再根據(jù)牛頓運動定律推算加速度。目前,高精度絕對重力儀主要可分為激光干涉重力儀和冷原子干涉重力儀兩類。
目前,最為精確的激光干涉重力儀是美國Micro-g&LaCoste公司的FG5-X,其測量精度可達2×10-9g[4],需要進行周期性的比對和校準,穩(wěn)定性、集成性和可移動性差。冷原子干涉重力儀是最近20年基于激光冷卻原子技術(shù)發(fā)展起來的一種新型重力儀,其在真空中下落或者上拋一團冷原子以實現(xiàn)冷原子團的干涉,通過精確測量冷原子團的位移以實現(xiàn)高精度的絕對加速度測量[5-9]。早期的原子重力儀體積龐大,隨著新技術(shù)的涌現(xiàn),小型化、可移動的原子重力儀開始出現(xiàn)。目前,冷原子干涉重力儀的性能已可達到FG5-X的水平,其集成性更好,系統(tǒng)組裝和調(diào)試更為簡單,更適合移動運輸,應(yīng)用前景廣闊。
1 工作原理
原子干涉重力儀建立在原子的量子態(tài)理論和原子受激Raman躍遷理論基礎(chǔ)上,通過激光與原子相互作用,利用冷原子來反演重力的作用。由于原子所處疊加態(tài)的干涉相位與運動路徑中受到的重力加速度相關(guān),檢測原子的內(nèi)態(tài)便可以獲得重力加速度的信息,其干涉過程如圖1所示[10]。
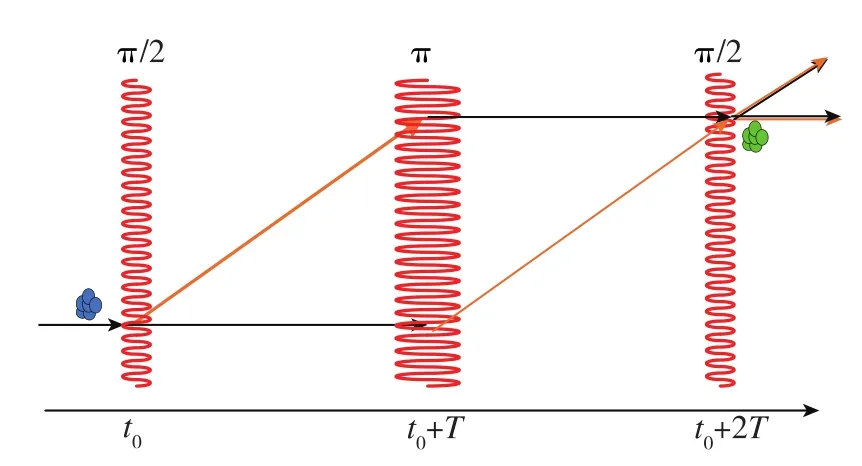
圖1 原子干涉重力儀的工作原理Fig.1 Working principle of atomic interference gravimeter
具體的干涉過程主要可分為以下4個部分:
2)態(tài)制備。關(guān)閉磁場后,在原子受重力作用向下自由下落的運動過程中,經(jīng)過態(tài)制備,原子團中處在對磁場不敏感的磁量子數(shù)為零的基態(tài)能級原子被挑選出來。態(tài)制備常用的方法有微波選態(tài)法。
3)原子干涉。使用π-π/2-π的Raman脈沖序列作用于冷原子,完成對原子團的分束、態(tài)反轉(zhuǎn)、再合束的過程,期間干涉相位的調(diào)節(jié)通過對雙光子Raman躍遷的頻率啁啾而實現(xiàn)。在冷原子自由下落的運動過程中,to時刻先與第一束π/2脈沖Raman光作用,此過程類似于光學(xué)干涉儀中分束鏡的作用,使原子與其相互作用后進行分束;T時間自有演化后,與第二束π脈沖Raman光作用,此過程類似于光學(xué)干涉儀反射鏡的作用,使兩條路徑上的原子團進行態(tài)的轉(zhuǎn)換;相等間隔T后與第三束π/2脈沖Raman光作用,完成干涉過程,原子處于兩個態(tài)的疊加態(tài)。
4)末態(tài)探測。采用可以有效提高探測信號信噪比的歸一化探測技術(shù),測量包含重力信息基態(tài)上的原子數(shù)概率,得到干涉條紋S,其可被描述為加速度g的函數(shù)形式[10]

式(1)中,g為重力加速度,N為冷原子團的原子數(shù),η為干涉信號對比度,T為干涉時間,keff為使原子產(chǎn)生干涉的Raman脈沖的有效動量。擬合干涉條紋便可以獲得重力值。
2 國內(nèi)外研究進展
美國Stanford大學(xué)的朱棣文研究組是最早開展冷原子干涉重力儀研究的研究組。1998年,該研究組的Kasevich等在實驗室靜態(tài)環(huán)境中實現(xiàn)了靈敏度為2.8×10-9g/Hz1/2的冷原子干涉重力儀[11-13];2014年,該研究組又完成了高度達10m的噴泉式冷原子干涉重力儀的搭建和測試工作[14],其靈敏度為6.7×10-12g/Hz1/2,已經(jīng)與相對重力儀的靈敏度水平持平。
在不限制功耗的實驗室靜態(tài)環(huán)境中,冷原子干涉重力儀的實驗室精度已經(jīng)達到可以替代全球?qū)Ш叫l(wèi)星系統(tǒng)(Global Navigation Satellite System,GNSS)的水平。但在實際應(yīng)用的復(fù)雜環(huán)境中,面對惡劣的環(huán)境、溫度、磁場變化等影響以及機載、星載等需求,SWaP(即體積Size,重量Weight,功耗Power)和采樣帶寬是限制冷原子干涉重力儀應(yīng)用和實際精度的重要因素。
2008年,美國Stanford大學(xué)的Kasevich研究組首次完成了冷原子干涉器件的低SWaP集成化工作,研制出了第一臺可用于轉(zhuǎn)動、線加速度和重力梯度測量的集成化、可移動冷原子干涉慣性系統(tǒng)。他們在真空系統(tǒng)、激光系統(tǒng)和電控系統(tǒng)上均進行了大量的集成化工作,使得冷原子干涉器件可以裝進一臺小型的箱式貨車,并進行移動。如圖2所示,Kasevich研究組使用集成化、可移動的冷原子干涉器件進行了轉(zhuǎn)動、線加速度和重力梯度的測量。在抑制共模噪聲后,其線加速度測量靈敏度可達4.2×10-9g/Hz1/2,已十分接近C-SCAN的研究目標[15]。
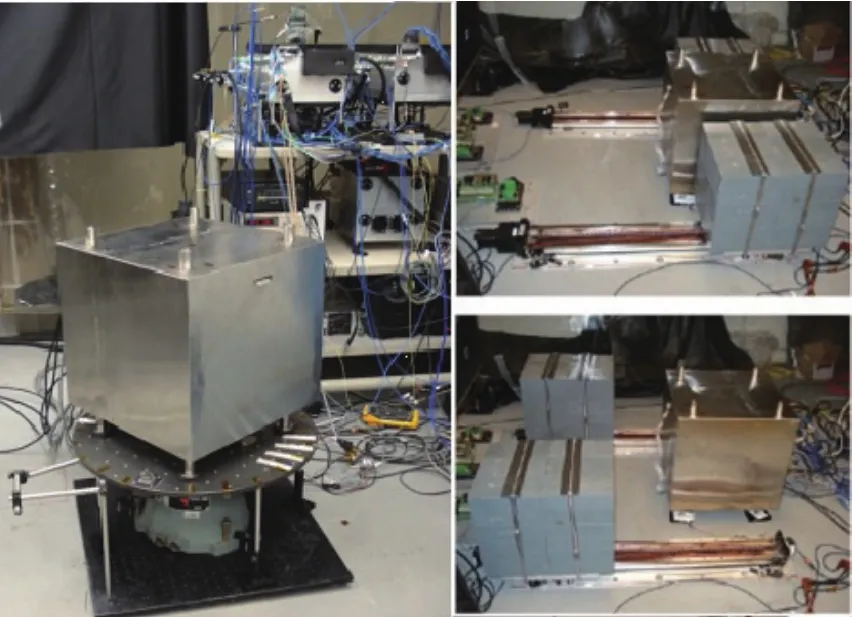
圖2 Kasevich研究組使用集成化、可移動冷原子干涉器件進行實驗測量Fig.2 Kasevich research group used integrated,portable cold atom interference devices for experiment measurements
2015年,LP2N、LNE-SYRTE和ONERA等初步完成了ESA的iSense研究計劃,通過對真空系統(tǒng)、磁場線圈、激光系統(tǒng)、光學(xué)器件和電控系統(tǒng)的集成化,研制出了集成化、可移動的冷原子干涉重力儀。iSense與Kasevich研究組工作的最大不同在于原子芯片的使用,其通過原子芯片對冷原子操控系統(tǒng)的集成實現(xiàn)了降低SWaP的目的。iSense的理論靈敏度可達3.9×10-9g/Hz1/2,優(yōu)于FG5-X,但體積僅為FG5-X的1/24.5,質(zhì)量僅為其1/5.1,功耗僅為其1/2.1。
(二)澆水和中耕培土。定植后要及時澆水緩苗,水下滲后覆土。澆水或雨后進行中耕松土,在雨季前將筍壟培高15厘米左右。
與上述研究計劃的思路不同,LP2N和LNESYRTE主持的MINIATOM研究計劃著重于通過物理系統(tǒng)的簡化而非組件的集成化來實現(xiàn)SWaP的降低。如圖3所示,他們使用空心金字塔反射鏡將復(fù)雜的傳統(tǒng)冷原子物理系統(tǒng)簡化為1個反射鏡、1個液晶波片和1路激光。這一改進不僅大幅降低了重力儀的SWaP,而且實現(xiàn)了3×10-8g/Hz1/2的重力測量靈敏度和2×10-9g~3×10-9g的精度[16]。
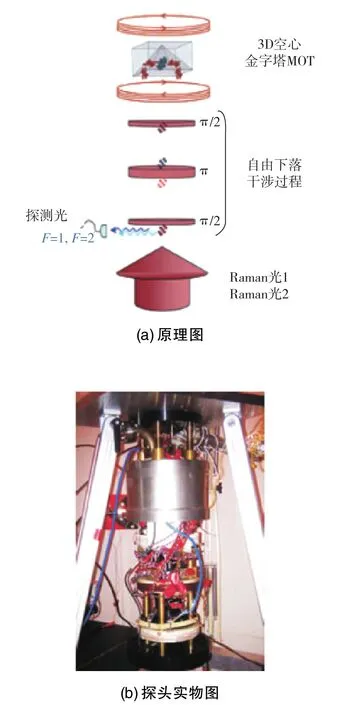
圖3 MINIATOM冷原子干涉重力儀Fig.3 MINIATOM cold atomic interference gravimeter
在高采樣帶寬冷原子干涉器件的研究方面,New Mexico大學(xué)和美國Sandia國家實驗室的Biedermann研究組致力于提高冷原子干涉器件的采樣帶寬,以增強其對真實動態(tài)環(huán)境應(yīng)用的適應(yīng)性。他們使用再捕獲方法,適當降低干涉時間,以50Hz~100Hz的采樣帶寬,實現(xiàn)了0.9×10-6g/Hz1/2的加速度測量靈敏度[17]。如圖4所示,與目前慣性導(dǎo)航系統(tǒng)中使用的導(dǎo)航級加速度計產(chǎn)品(如AnalogDevice的 ADIS16385和 Honeywell的QA2000、QA3000等)相比,高采樣帶寬類型的冷原子干涉器件在采樣帶寬方面已經(jīng)可達到同一量級,且具有優(yōu)于一個數(shù)量級的靈敏度[18-19]。
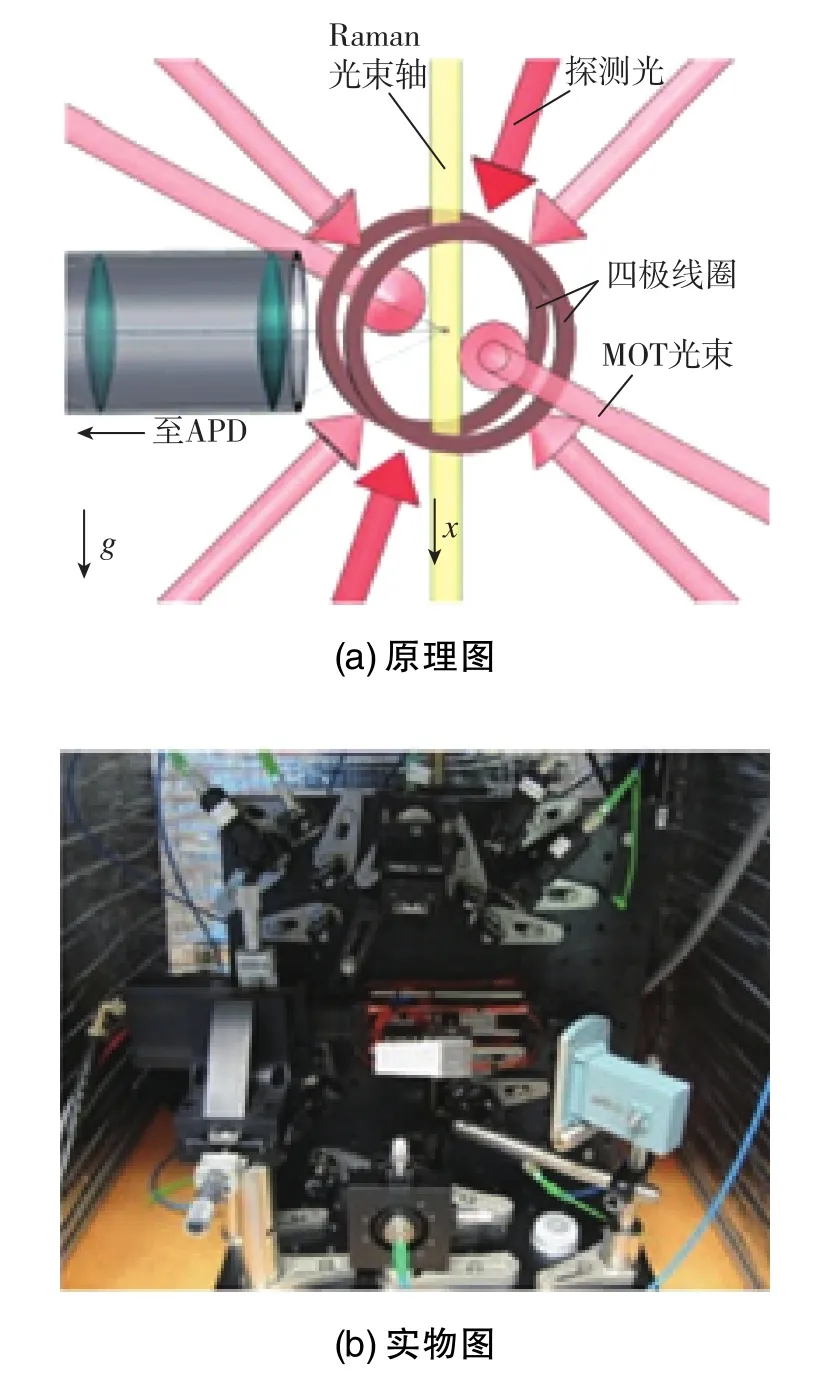
圖4 高采樣帶寬冷原子干涉重力儀Fig.4 Cold atomic interference gravimeter with high sampling bandwidth
隨著這些研究工作的推動,原子干涉重力儀已經(jīng)開始實現(xiàn)商業(yè)化的應(yīng)用。圖5(a)為AOSense公司冷原子干涉重力儀的商業(yè)產(chǎn)品,該產(chǎn)品靈敏度優(yōu)于10-9g/Hz1/2[20]。 圖 5(b)為 muQuans公司推出的冷原子干涉重力儀產(chǎn)品AQG-A01[21],其探頭體積為φ38cm×70cm,激光和控制電路的尺寸為100cm×50cm×70cm,質(zhì)量為100kg,靈敏度約為5×10-8g/Hz1/2,長期穩(wěn)定性為1×10-9g,是一款達到FG5-X性能水平的冷原子干涉重力儀產(chǎn)品。
同時,越來越多的實驗小組嘗試在實驗室外的移動平臺上對原子重力儀進行研究測試。據(jù)報道,在運動速度為1cm/s的移動卡車中已測得重力梯度[22];在零重力平面上實現(xiàn)了加速度的測量[23-24];在移動電梯中實現(xiàn)了低精度重力測量[25];在惡劣的海況下,在船上實現(xiàn)了靈敏度優(yōu)于10-5g/Hz1/2的重力測量[26]。這些研究證實,原子干涉重力儀具有在移動平臺上實現(xiàn)高靈敏度的絕對重力測量的潛力。

圖5 冷原子干涉重力儀產(chǎn)品Fig.5 Products of cold atomic interference gravimeter
目前在國內(nèi),華中科技大學(xué)、武漢物理與數(shù)學(xué)研究所、浙江大學(xué)、中國科技大學(xué)、清華大學(xué)、中國計量科學(xué)研究院和北京航天控制儀器研究所等均開展了冷原子干涉重力儀的研究。上述研究主要從基礎(chǔ)科學(xué)及國家對重力標準的需求出發(fā),集中于固定式冷原子干涉重力儀上。華中科技大學(xué)的羅俊、胡忠坤研究組搭建的固定式冷原子干涉重力儀的靈敏度為4.2×10-9g/Hz1/2[27],達到了國際先進水平,但工程化、小型化可移動產(chǎn)品仍處于起步階段。浙江大學(xué)是國內(nèi)開展可移動冷原子干涉重力儀研究工作較早的單位[28-29],其研制的重力儀的靈敏度達到了1×10-7g/Hz1/2,但設(shè)備穩(wěn)定性、環(huán)境適應(yīng)性等各方面性能還需進一步完善,有必要引入新技術(shù),進一步實現(xiàn)小型化、低功耗的需求。北京航天控制儀器研究所相繼攻克了條紋鎖相閉環(huán)、重力抑制、低相噪微波鏈路和快速跳頻、高信噪比多組分原子成像、敏感軸噪聲主動抑制等關(guān)鍵技術(shù),實現(xiàn)了重力測量。2017年,華中科技大學(xué)、浙江工業(yè)大學(xué)、武漢物理與數(shù)學(xué)研究所等研制的原子干涉重力儀參加了由中國計量科學(xué)研究院在北京昌平組織的第10屆全球絕對重力儀國際比對,取得了優(yōu)于10μGal的成績,與FG5-X相當。
目前,隨著原子干涉重力儀工程化的迅猛發(fā)展,考慮到航空、航海應(yīng)對數(shù)據(jù)空間分辨率等需求,原子干涉重力儀與傳統(tǒng)加速計的互補工作模式有望成為解決其工程應(yīng)用問題的主要手段。
3 關(guān)鍵技術(shù)
實現(xiàn)原子干涉重力測量涉及到冷原子團制備技術(shù)、Raman激光相位鎖定技術(shù)和重力方向的Doppler敏感原子干涉技術(shù)等,目前這些技術(shù)均相對比較成熟。為了進一步研制SWaP和高采樣帶寬的原子干涉重力儀,還有很多技術(shù)需要攻克,如小型化超高真空技術(shù)、小型化高穩(wěn)定激光技術(shù)、低相噪相位鎖定技術(shù)、高性能的磁場屏蔽技術(shù)、低頻隔振技術(shù)、閉環(huán)與噪聲處理技術(shù)等[30]。這里主要介紹一下最關(guān)鍵的小型化超高真空技術(shù)、小型化高穩(wěn)定的激光技術(shù)和閉環(huán)與噪聲處理技術(shù)。
(1)小型化超高真空技術(shù)
高精度重力測量對系統(tǒng)真空度的要求很高,一般在無銣蒸汽釋放時要維持在10-9Pa的超高真空水平。目前,常采用非蒸散型吸氣劑(Non Evaporable Getter,NEG)技術(shù)與離子泵技術(shù)相結(jié)合而形成的復(fù)合泵技術(shù),以減小真空腔的體積。此外,通過物理系統(tǒng)的簡化(如空心金字塔反射鏡法[16]),可大幅降低重力儀真空系統(tǒng)的復(fù)雜性。隨著MEMS/MEOMS技術(shù)的提高,可引入低功耗的原子芯片、光柵芯片,使冷原子器件集成至芯片量級。如圖6所示,Arnold研究組采用光柵原子芯片已可以將原子溫度冷卻到3μK,完全可滿足干涉重力測量的需要,且可實現(xiàn)連續(xù)模式操作。在未來,結(jié)合原子導(dǎo)引技術(shù)有望實現(xiàn)集成化、魯棒性、高帶寬的慣性傳感器[31]。
(2)小型化高穩(wěn)定的激光技術(shù)
在小型化冷原子重力儀中,有必要使用滿足低SWaP需求的堿金屬原子波段激光器、光隔離器、光開關(guān)、激光頻率控制和堿金屬蒸汽壓控制技術(shù)。圖7為AOSense公司研制的模塊化產(chǎn)品[20]。目前,常用通訊波段的DFB激光器作為光源,摻鉺光纖放大器作為光功率放大器件,引入鈮酸鋰晶體進行光倍頻技術(shù)方案,使激光系統(tǒng)更加緊湊、穩(wěn)定。歐空局使用雙種子光源(一個作為頻率基準,另一個作為實際使用光源)方案,通過Offset Locking和YIG快速跳頻技術(shù)實現(xiàn)了基于頻率基準的吉赫茲(GHz)水平的快速跳頻。引入單種子光源激光系統(tǒng)方案,可滿足小型化、多軸加速傳感的需求。
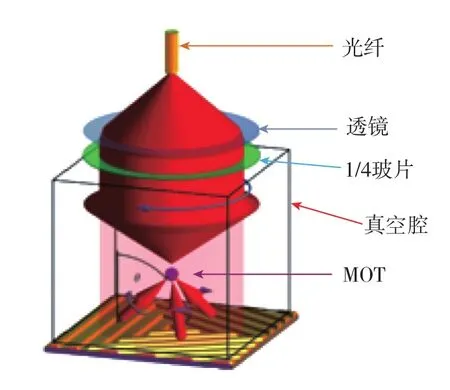
圖6 Arnold研究組的光柵芯片磁光阱Fig.6 Grating MOT of Arnold research group
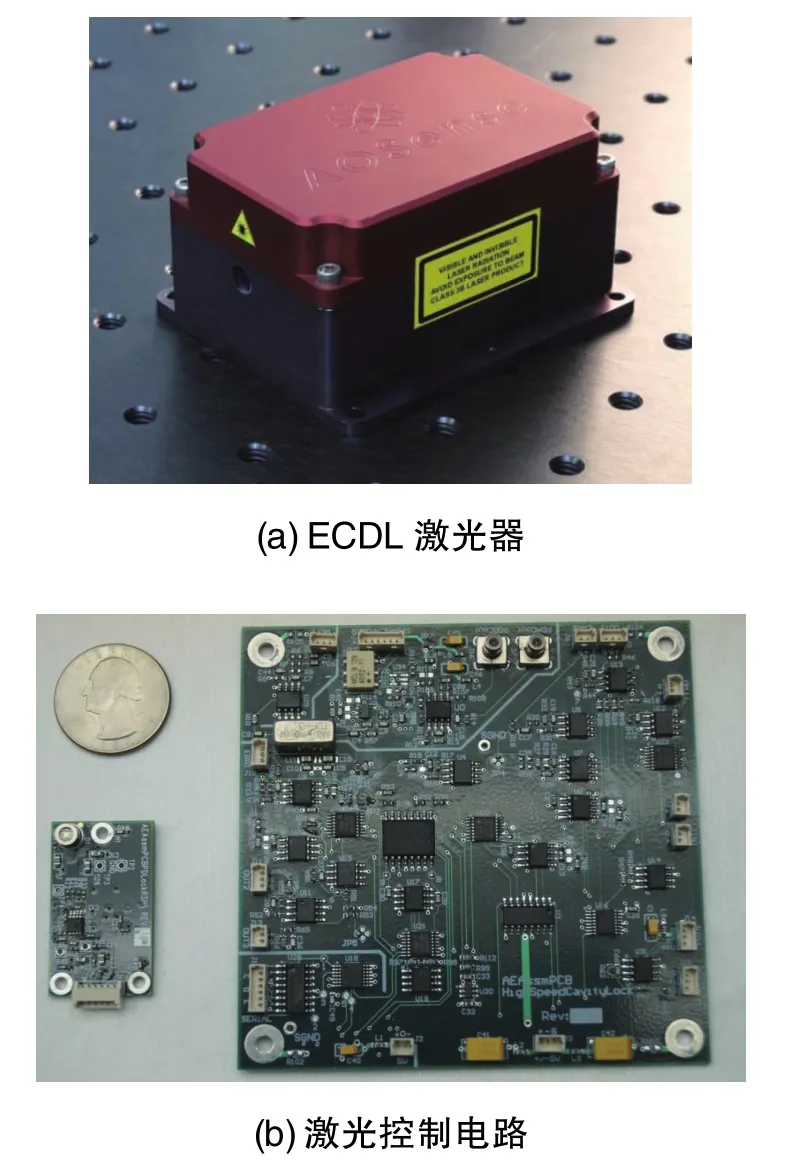
圖7 AOSense公司研制的模塊化產(chǎn)品Fig.7 Modular products developed by AOSense
(3)閉環(huán)與噪聲處理技術(shù)
穩(wěn)定的加速度測量需要對系統(tǒng)進行閉環(huán),一般通過EOM施加一個掃頻信號對加速度效應(yīng)進行抵消,將原子干涉條紋控制在斜率最為敏感處,從而實現(xiàn)較高水平的靈敏度。但在較高的動態(tài)環(huán)境下,掃頻的范圍需要增大以適應(yīng)較大的量程,鎖定速度也需有相當?shù)奶嵘M瑫r,降低主要由Raman激光的AC斯塔克效應(yīng)、幅度、相位調(diào)制、機械振動等引起的光學(xué)系統(tǒng)相位噪聲也是提高重力測量靈敏度的關(guān)鍵。采用條紋鎖定技術(shù)有助于快速時變信號的監(jiān)測,提高采樣率[32]。通過引入Kalman濾波技術(shù),將原子干涉加速度計與傳統(tǒng)加速度計互補使用,估計長時偏差漂移,可提高魯棒性等[33]。
4 結(jié)論
原子干涉重力儀是基于冷原子物質(zhì)波干涉的一種新型重力儀,具有穩(wěn)定性高和精度高等特點。隨著小型化可移動的高精度原子重力儀的出現(xiàn),其在慣性導(dǎo)航、地震預(yù)報、全球重力場監(jiān)控等領(lǐng)域有著廣泛的潛在應(yīng)用空間。研制低體積、低功耗的便攜式原子干涉重力儀是主要的發(fā)展趨勢。除了不斷優(yōu)化現(xiàn)有的實驗裝置、簡化物理結(jié)構(gòu)、研制小型化/低相噪的高精度樣機外,有必要引入條紋鎖定技術(shù)、低功耗原子芯片等新技術(shù),以提高采樣率,解決重力測量工作 “死區(qū)”的閉環(huán)問題,采用原子干涉重力儀與傳統(tǒng)加速計的互補工作模式解決其工程應(yīng)用問題。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00
