基于NARX神經網絡的路面不平度識別*
2019-08-08 02:17:58郭文翠谷盛豐
汽車工程 2019年7期
李 杰,郭文翠,谷盛豐,趙 旗
(吉林大學,汽車仿真與控制國家重點實驗室,長春 130025)
前言
路面不平度是車輛行駛的主要激勵,既對車輛平順性和乘員舒適性有直接影響,也對道路的質量和使用壽命有很大影響[1]。
2007年以來,國內外學者開始應用神經網絡進行路面不平度識別的研究[2-6]。其基本思想是將車輛響應和路面不平度作為輸入和輸出,通過神經網絡訓練建立兩者之間的關系。訓練完成之后,車輛響應和路面不平度的關系為非線性關系,由車輛響應就可直接識別路面不平度。其優點是既不需要公式推導,也不需要知道車輛參數,可減少人為工作量。
基于神經網絡進行路面不平度識別,目前主要采用 BP神經網絡[3]、RBF神經網絡[2]、小波神經網絡[4]或 NARX神經網絡[7-9]等。前 3種神經網絡為靜態神經網絡,由輸入層、隱含層和輸出層組成,網絡僅具有靜態特性;而NARX神經網絡為動態神經網絡,其在輸入層前增加時延層,使網絡具有了動態特性,可由過去時刻的狀態預測下一時刻的狀態。
2008年,Ngwangwa[7]建立 1/4汽車 2自由度平順性模型獲得車身位移和路面不平度,應用NARX神經網絡進行路面不平度識別。2010年,Ngwangwa[8]建立礦用貨車平面8自由度平順性模型獲得前輪垂直加速度、車身質心垂直加速度和駕駛員上軀干加速度和路面不平度,應用NARX神經網絡進行路面不平度識別。2014年,Ngwangwa[9]在小型地面車安裝3個傳感器,分別測量左后輪、左前輪和右后輪加速度,在礦用貨車上安裝2個傳感器,分別測量車輛左前輪、右前輪的加速度。其對加速度進行兩次積分,并且去除速度的線性趨勢和位移的二次趨勢處理低頻漂移,將得到的速度和位移、加速度作為輸入,應用訓練完成的NARX神經網絡進行路面不平度識別,由于通過加速度積分得到的速度和位移誤差較大,影響了識別結果。
縱觀Ngwangwa的研究可以發現,其先后選擇的車輛響應不同,既沒有考慮各個車輛響應作為輸入的合理性,也沒有考慮將車輛響應進行適當組合作為輸入方案,不利于在實際車輛上應用。
本文中致力于解決車輛響應選擇的準則和合理設計車輛響應組合確定NARX神經網絡輸入方案的問題,為實際應用NARX神經網絡識別路面不平度提供理論和方法基礎。
1 NARX神經網絡和評價指標
1.1 NARX神經網絡
NARX神經網絡是一種典型的動態神經網絡,由TDL時延層、輸入層、輸出層和隱含層組成。TDL時延層將神經網絡的輸出進行延遲處理反饋到輸入層,以提高預測效果。輸入層負責將輸入集中起來,對輸入進行權值和閾值的運算,再將運算結果傳遞給隱含層。隱含層可為1層或多層,負責接收數據,繼續進行權值和閾值的運算,最終傳遞給輸出層。輸出層負責將傳遞過來的計算輸出與期望輸出進行比較,得到誤差值,再反向修正權值、閾值和傳播輸出數據。
典型的NARX神經網絡結構如圖1所示。TDL將輸入xi和輸出yk進行c階延遲處理,對輸入既可進行延遲處理也可不進行延遲處理。輸入神經元個數為n,隱含層為1和隱含層神經元個數為l,輸出層神經元個數為m,隱含層閾值為aj,輸出層閾值為bk,期望輸出為ok,期望輸出與計算輸出之間的誤差為ek,輸入層與隱含層之間的權值、輸出延遲層與隱含層之間的權值和隱含層與輸出層之間的權值分別為 ωij,ωsj,ωjk。
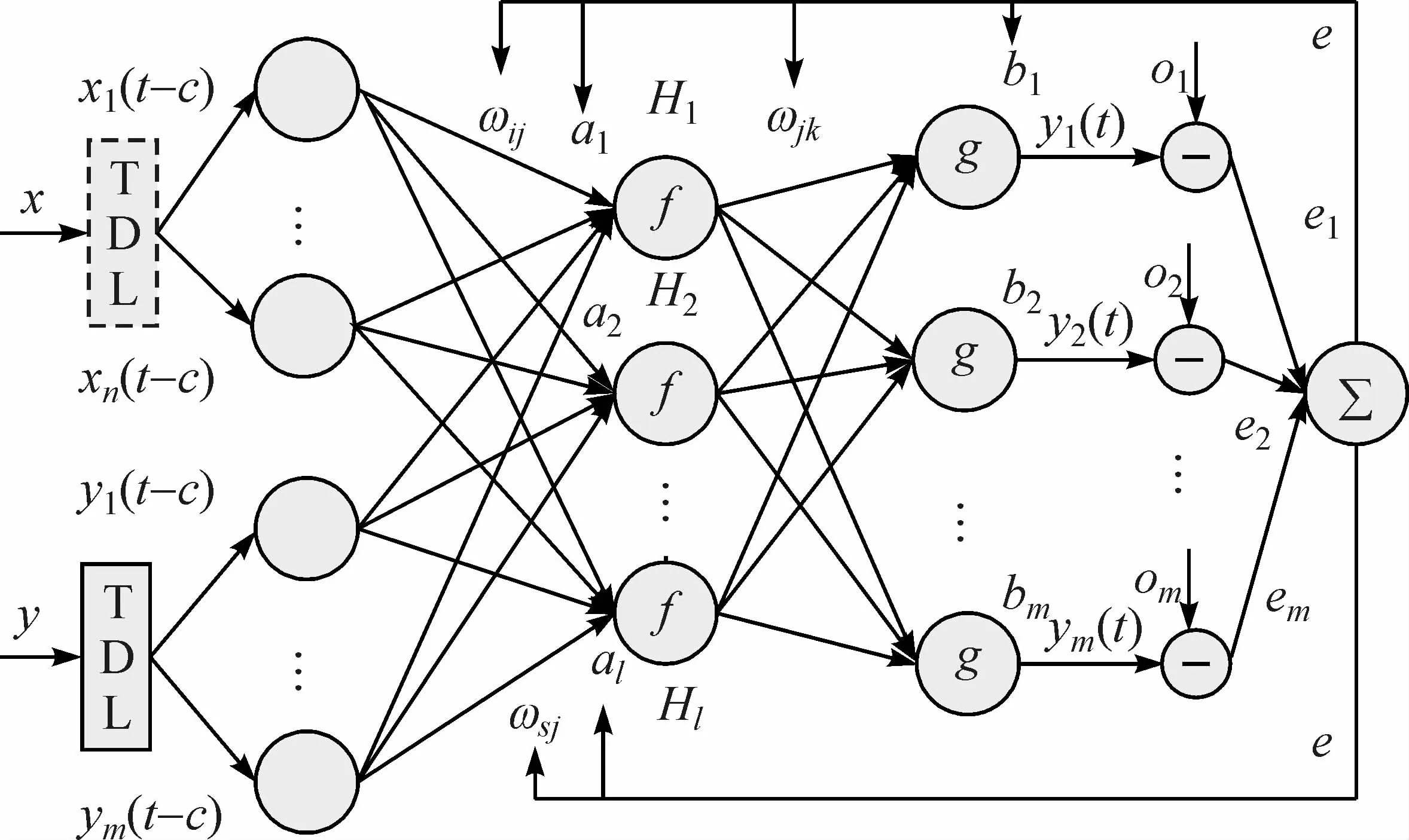
圖1 典型的NARX神經網絡結構
1.2 NARX神經網絡訓練過程
確定NARX神經網絡結構后,對神經網絡進行訓練,訓練過程如下。
第1步:網絡初始化
確定 n,m,l,ωij,ωjk,ωsj,aj,bk和 c等參數;設置訓練步數、學習率η、隱含層和輸出層的傳遞函數f和g。
第2步:隱含層輸出計算

第3步:輸出層輸出計算

第4步:誤差計算

第5步:權值更新
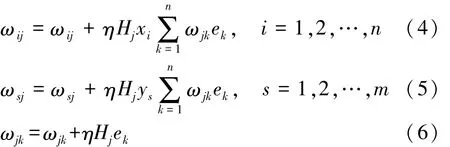
第6步:閾值更新

第7步:判斷迭代是否結束,如果沒有結束,返回第2步繼續迭代。
1.3 NARX神經網絡結構設計
NARX神經網絡TDL時延層、輸入層、輸出層的神經元個數由實際問題的輸入和輸出確定,一般對輸出只進行1次延遲處理,不進行多次延遲處理。
在實際應用中,隱含層一般取為1層,隱含層神經元節點數 l[10]為

式中a為0~10之間的常數。
通常,隱含層傳遞函數f取為logsig,輸出層傳遞函數g取為purelin,分別表示為

神經網絡的權值和閾值通過訓練算法調整,NARX神經網絡有14種訓練算法,其中默認訓練算法為 trainlm,訓練速度快,識別精度高[10]。
1.4 評價指標
為對NARX神經網絡識別結果進行評價,引入相關系數和均方根誤差兩個評價指標[11-12]。
相關系數R表示計算輸出與期望輸出變化趨勢一致的程度,均方根誤差RMSE表示識別結果的穩定性:
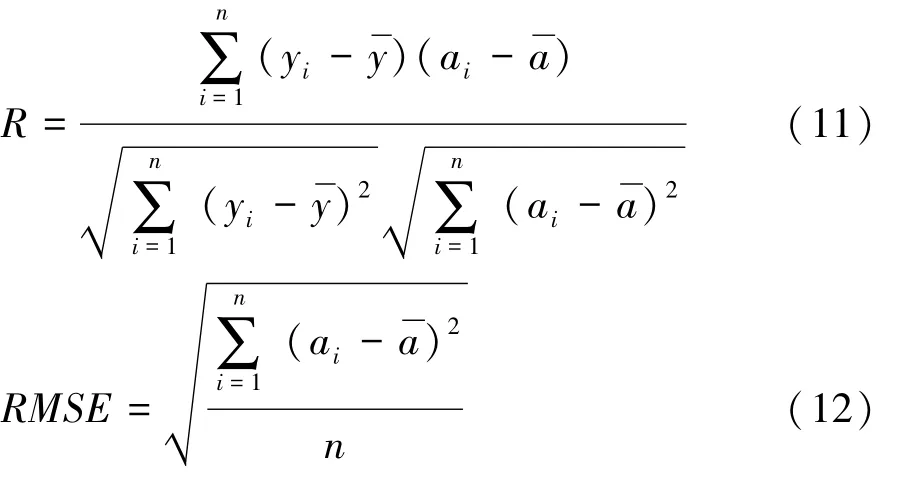
式中:yi和ai分別為計算輸出和期望輸出的第i個點;y和a分別為計算輸出和期望輸出的平均值;n為采樣點數。
相關系數越高,說明識別越好。均方根誤差越小,識別結果越好、越穩定可靠。兩者同時最好表示識別效果最佳。
2 平順性模型
2.1 前后輪路面不平度模型
采用濾波白噪聲模型描述前后輪路面不平度q1和 q3,表示為[13]
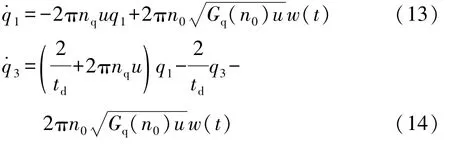
式中:w(t)為均值為0和方差為1的標準高斯白噪聲;u為車速;Gq(n0)為路面不平度系數;nq為空間下截止頻率,nq=0.0001;n0=0.1為參考空間頻率;td為前后輪滯后時間。
引入 q=[q1,q3]T,聯立式(13)和式(14),有

其中
2.2 汽車平順性4自由度平面模型
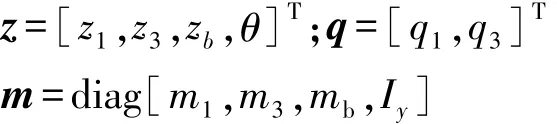
平順性4自由度平面力學模型由車身、前后懸架和前后車輪組成,如圖2所示,其參數說明見文獻[13]。
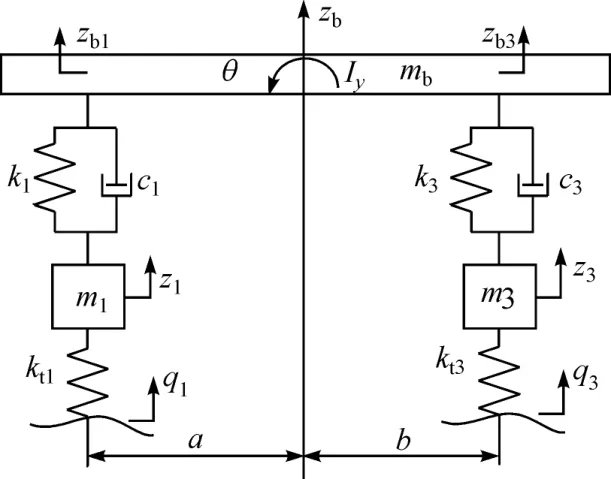
圖2 平順性4自由度平面模型
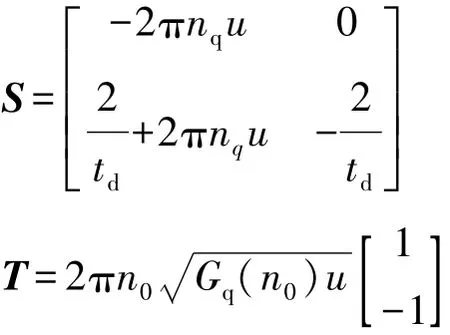
平順性4自由度平面模型[13]表示為

其中

2.3 平順性和路面不平度平面模型
引入x=[z,z·]T,將式(16)轉化為狀態空間方程,有

取新變量 y=[q,x]T,組合式(15)和式(17),得

對于平順性4自由度平面模型,前懸架動撓度fd1和后懸架動撓度fd3可表示為

3 路面不平度NARX神經網絡識別
3.1 輸入選擇
由于希望在實際車輛上應用NARX神經網絡識別路面不平度,因此,應當選擇可在實際車輛上測試的車輛響應作為NARX神經網絡的輸入。
3.2 輸入方案的正交試驗設計
根據輸入選擇,可以用于NARXBP神經網絡輸入的車輛響應為8個。如果每個車輛響應有作為輸入和不作為輸入兩種情況,全部車輛響應進行組合,就有28=256個輸入方案。因此,為了減少輸入方案的個數,引入正交試驗設計確定具有代表性車輛響應的組合作為輸入方案。
正交試驗設計通過正交表實現代表性輸入方案的設計。正交表常用La(bc)表示,L為正交表,a為正交表的行數,b為因素的水平數,c為正交表的列數。
正交表選擇的基本原則[19]是:水平應與正交表水平數一致,正交表的列數應大于或等于因素個數,在容納因素的情況下選取小號正交表。
根據上述選取原則,將每個車輛響應視為一個因素,選取的正交表格式為L32(231)。每個因素對應一列,其余為空列。輸入方案中不包含某個響應,其水平為1;包含某個響應,其水平為2。
3.3 輸入和輸出的獲得
通過平順性模型仿真可獲得前后輪路面不平度和車輛響應。由于前后輪路面不平度僅差一個滯后時間td,因此,將前輪路面不平度作為識別對象,即NARX神經網絡的輸出。于是,輸入層神經元個數n為8,代表8個響應。輸出層神經元節點數m為1,代表前輪路面不平度。
采用某汽車參數,取常用路面等級B級,車速為常用車速60 km/h,仿真時間為21.6 s,采樣間隔為0.01 s。因此,仿真路段總長為360 m,采樣間隔為167 mm,介于150~200 mm之間,符合實際的采樣間隔,采樣點數為2 160。仿真結果如圖3所示。
將前240 m的1 440個點的前輪路面不平度作為訓練集輸出,將后120 m的720個點的前輪路面不平度作為測試集的輸出,確定神經網絡識別的效果。
3.4 路面不平度識別
隱含層為單層,隱含層神經元個數由公式確定為14,輸入不設置延時,輸出延時為1∶2[9]。依據正交表L32(231)確定32個輸入方案的水平。
采用NARX神經網絡,基于車輛響應對前輪路面不平度進行識別,取5次平均值。限于篇幅限制,僅給出32個方案的評價指標,如表1所示。對于相關系數和均方根誤差,8個因素的各水平均值的結果如表2所示。
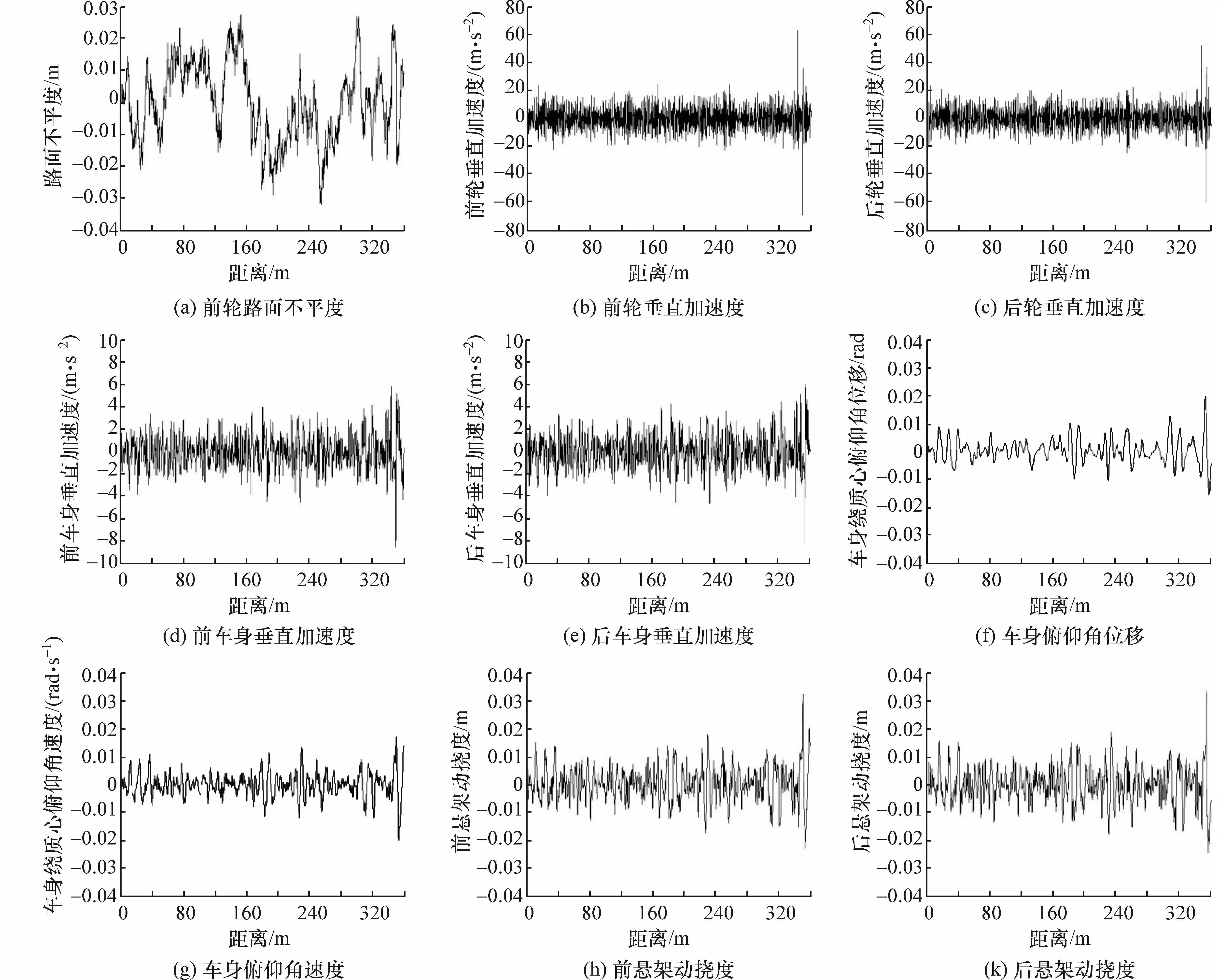
圖3 前輪路面不平度和車輛響應
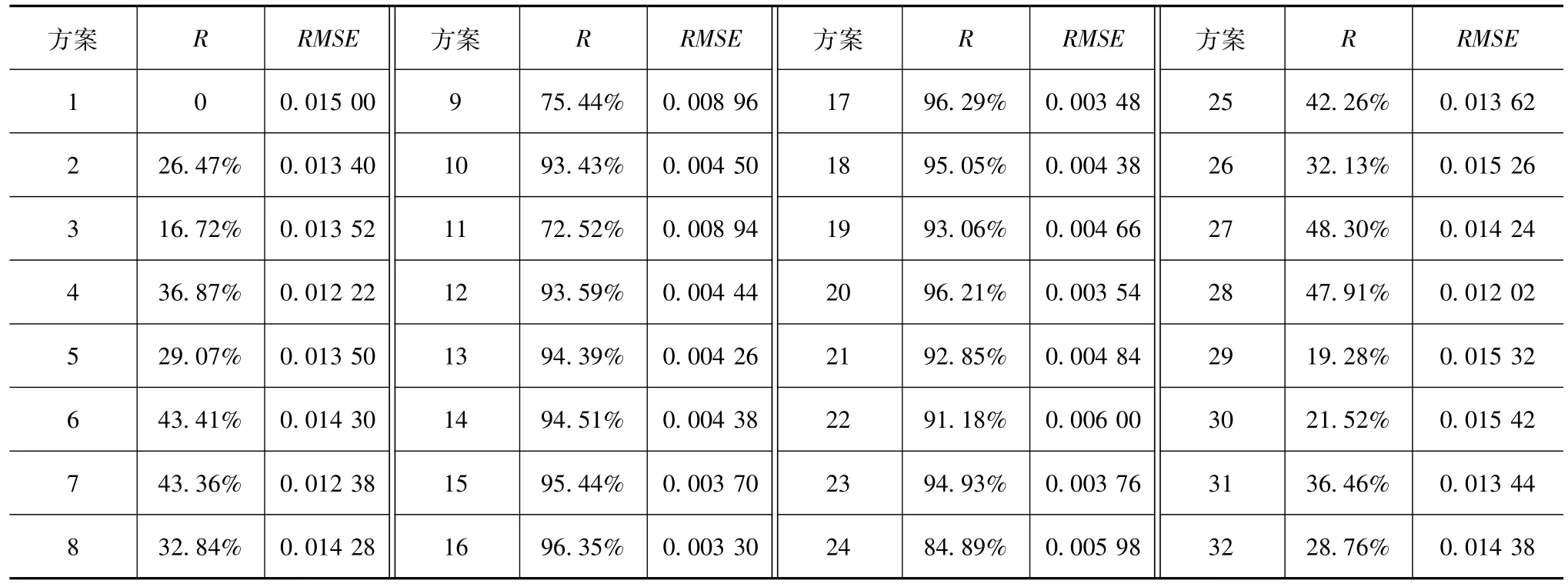
表1 NARX神經網絡正交試驗設計的評價指標
由表1可以看出,方案9至方案24,相關系數比較高,超過了60%,大部分超過90%,達到了極強相關的程度,與其余16個方案相比,均方根誤差也比較小,方案16相關系數最高,同時均方根誤差最小。
為了解決上述問題,由正交試驗設計對相關系數和均方根誤差進行方差分析[19],結果如表3所示。
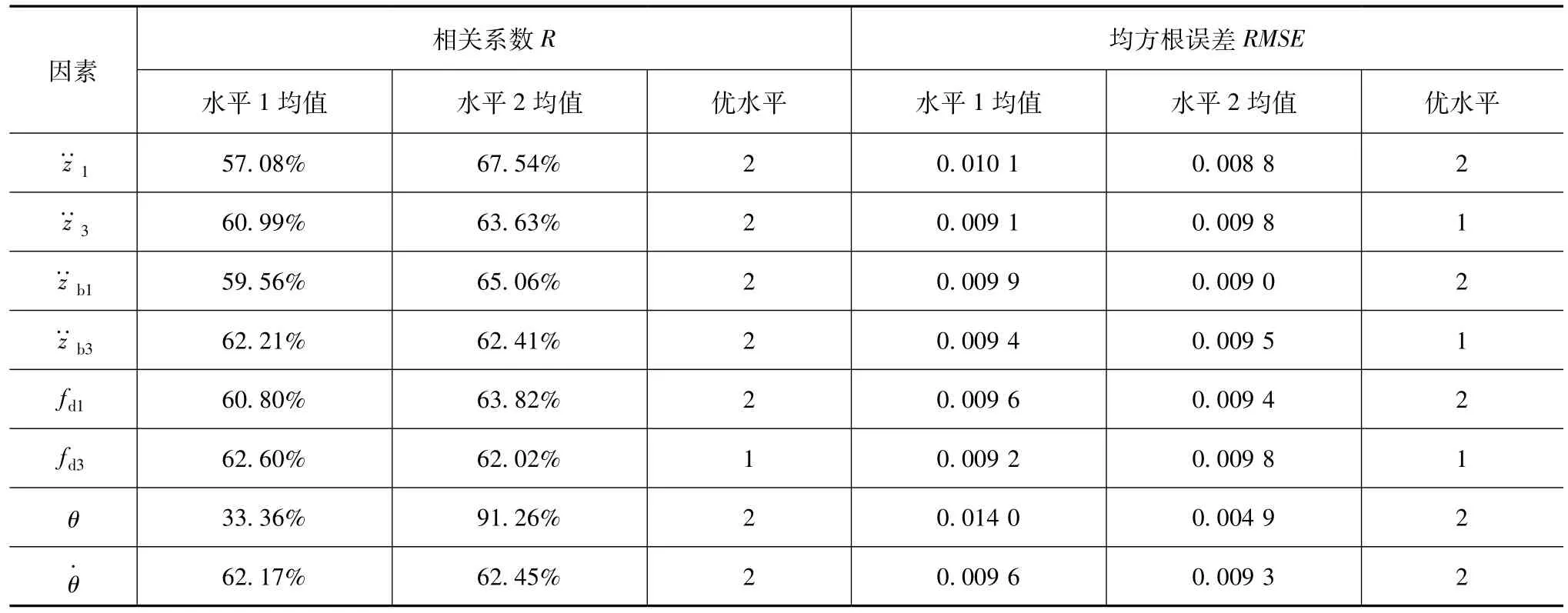
表2 NARX神經網絡正交試驗設計水平均值
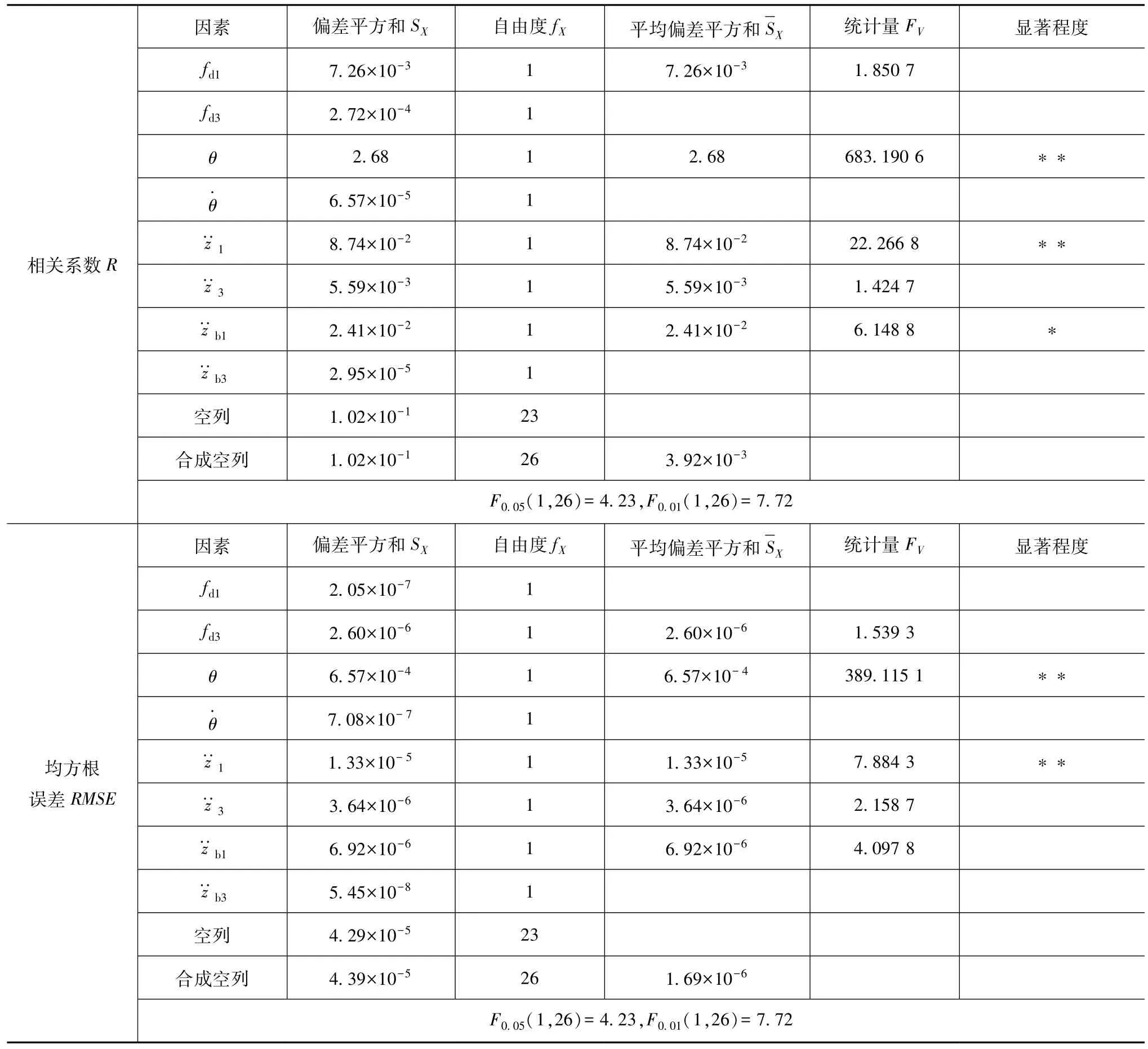
表3 NARX神經網絡識別結果方差分析
由圖4可以看出,優水平方案的計算輸出和期望輸出吻合程度都很高,功率譜密度在整個頻率區間內吻合較好。
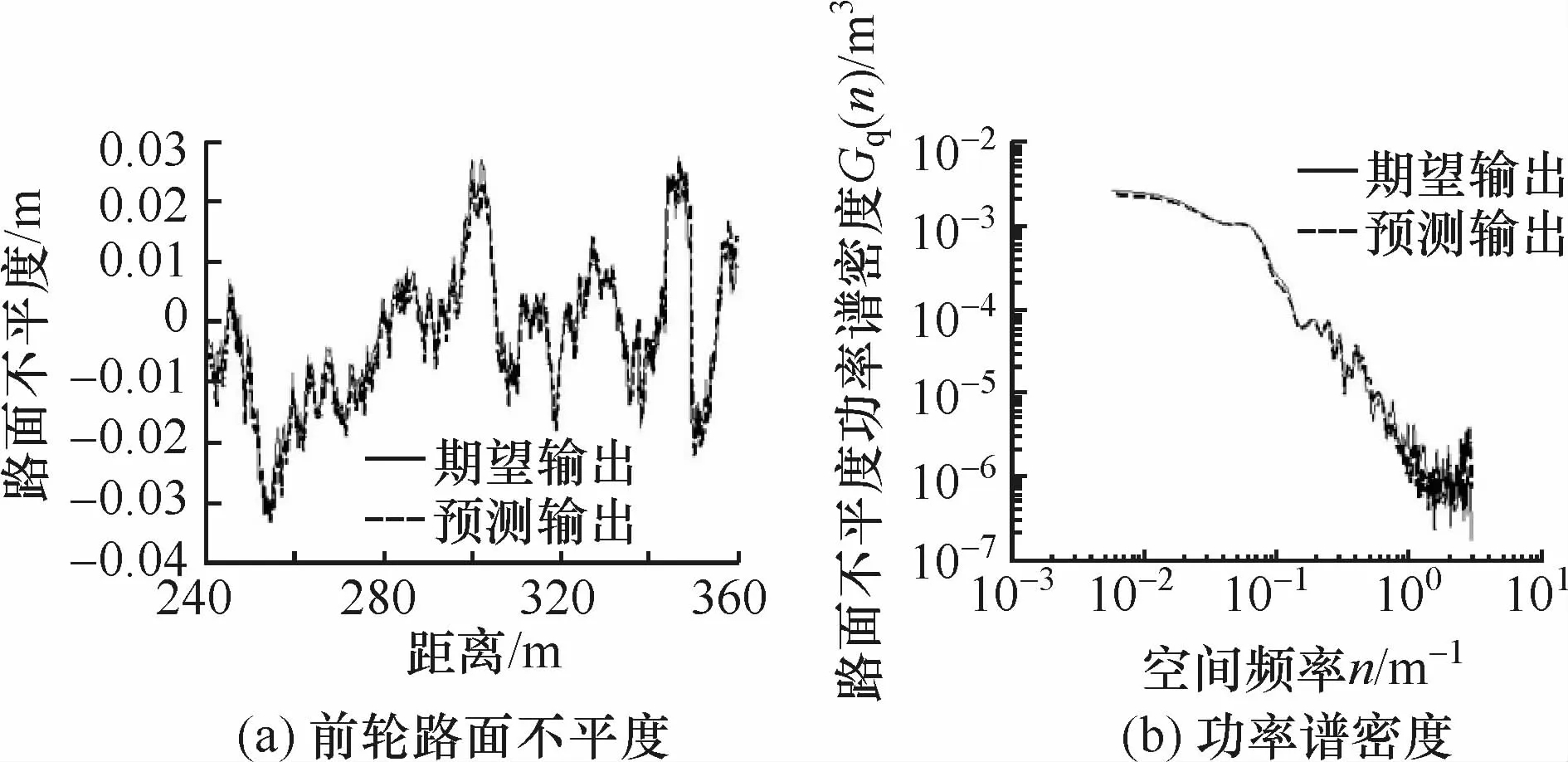
圖4 NARX神經網絡優水平方案的識別結果
比較原方案16和優水平方案可以看出,優水平方案依然是最好的輸入方案,而且需要的車輛響應也最少。因此,確定優水平方案為最優輸入方案。
4 討論
4.1 NARX神經網絡的離線訓練和在線應用
實際應用神經網絡,需要離線訓練和在線應用兩個過程。離線訓練過程,是確定合適輸入和輸出,選擇適當的神經網絡進行訓練和測試,最后確定出輸入和輸出的神經網絡非線性關系。在線應用過程,是實際測試輸入,再代入神經網絡非線性關系確定出輸出。這樣,就有效解決了神經網絡訓練和測試耗時較長的問題。
針對路面不平度識別,測試z··1,z··b1,θ·,θ和fd1,再將其代入訓練NARX神經網絡,就可通過計算獲得路面不平度,相對而言在線應用的耗時不長。
4.2 NARX神經網絡識別結果的適應性分析
為了說明NARX神經網絡識別結果的適應性,應用60 km/h和B級路面訓練完成的NARX神經網絡,改變車速后對路面不平度進行識別,得到的評價指標如表4所示。
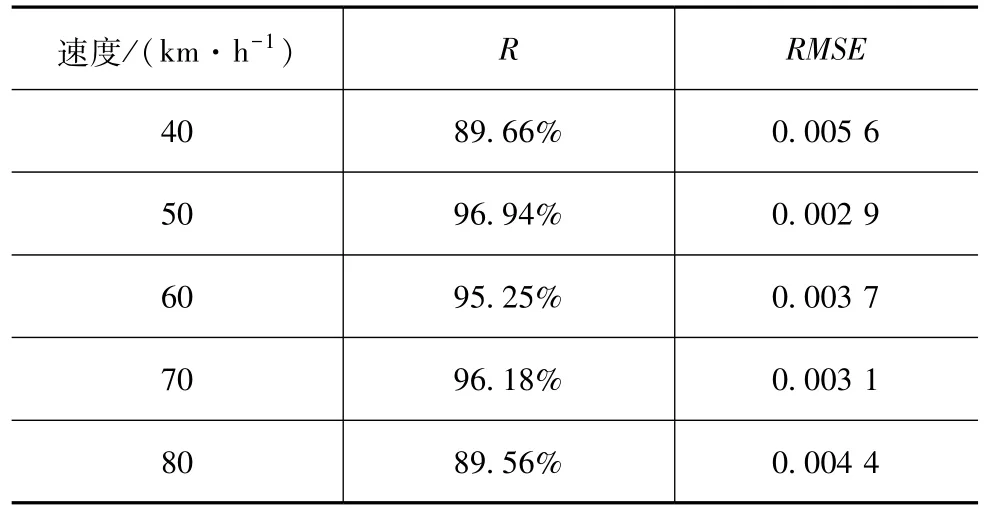
表4 不同速度路面不平度識別的結果
由表4可以看出,50~70 km/h時,相關系數在95%以上,均方根誤差在0.004以下,識別結果較好;40和80 km/h時,相關系數有所下降,均方根誤差有所上升,但識別結果仍較好,因此說明NARX神經網絡識別結果對車速變化具有較好的適用性。
應用60 km/h和B級路面訓練完成的NARX神經網絡,改變路面等級后對路面不平度進行識別,得到的評價指標如表5所示。
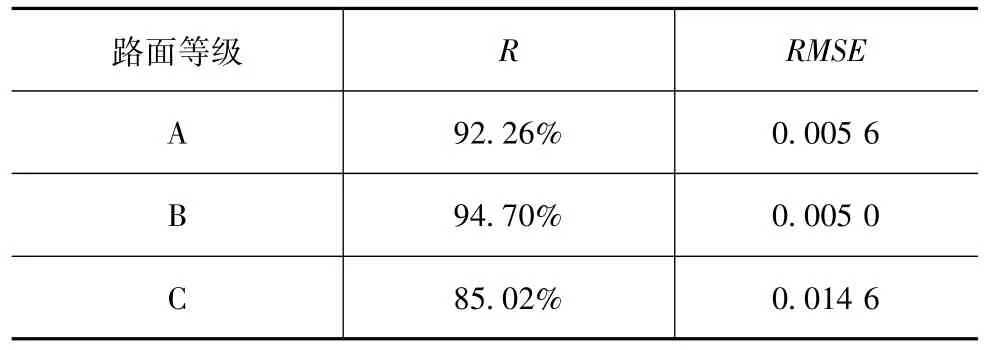
表5 不同路面等級路面不平度識別結果
由表5可以看出,A級路面和B級路面的識別結果較好,C級路面識別結果達到良好。由于我國建設的發展,城市路面等級一般為B級,C級路面屬于少數狀況。因此,說明NARX神經網絡識別結果對路面等級變化具有較好的適用性。
本文中的研究目前只限于道路整體水平的情況,沒有考慮道路的坡度影響。事實上,道路坡度識別也是車輛動力學研究的一個非常重要和正在推進的方面,將道路坡度識別和坡道路面不平度識別相結合,將成為今后研究的一個方向,此外,如何通過道路試驗驗證本文的研究結果,也是今后研究的另一方向。這兩個方向的推進,都需要在理論和方法上對基于神經網絡的路面不平度識別方法開展更為全面的研究和分析。
5 結論
對NARX神經網絡及其訓練過程和結構設計進行了研究和總結,采用相關系數和均方根誤差作為NARX神經網絡識別效果的評價指標。建立了前后輪路面不平度濾波白噪聲模型和汽車平順性4自由度平面模型,通過仿真可得NARX神經網絡的輸入和輸出。
為解決基于NARX神經網絡路面不平度識別存在如何考慮哪些車輛響應適合作為輸入和如何合理組合車輛響應作為輸入方案的問題,以車輛可以測試的車輛響應作為NARX神經網絡輸入的準則,引入正交試驗設計解決了NARX神經網絡車輛響應組合輸入方案和最優輸入方案確定的問題,采用方差分析解決了優水平矛盾車輛響應水平確定問題。
某汽車在常用路面等級和常用車速行駛下前輪路面不平度識別的研究結果表明,引入相關系數和均方根誤差可以解決NARX神經網絡識別效果評價問題,而將NARX神經網絡與正交試驗設計相結合,可以解決車輛響應組合輸入方案和最優方案問題。這些結果為后續實際應用NARX神經網絡或其他神經網絡識別路面不平度奠定了一定理論和方法的基礎。
