基于matlab標準差分析的登月軟著陸粗避障階段的設計
2019-08-12 01:27:59李昊哲
電腦知識與技術 2019年16期
李昊哲

摘要:粗避障階段,通過matlab實現對高程圖中某一部分數據計算得該區域的標準差,以實現對該區域平整度的表達,通過規定大小的矩陣掃描整個高程圖,得到高程圖各區域的標準差矩陣,根據地區情況設置閾值,篩選整個地區中較平坦部分,通過比較其與飛船投影點的距離決定最優著陸點。
關鍵詞:粗避障階段;matlab;標準差
中圖分類號:TP311? ? ? ? 文獻標識碼:A
文章編號:1009-3044(2019)16-0245-02
開放科學(資源服務)標識碼(OSID):
1 問題簡述
飛船在著陸準備軌道上的運行質量為2.4t,其安裝在下部的主減速發動機能夠產生1500N到7500N的可調節推力,其比沖(即單位質量的推進劑產生的推力)為2940m/s,可以滿足調整速度的控制要求。在四周安裝有姿態調整發動機,在給定主減速發動機的推力方向后,能夠自動通過多個發動機的脈沖組合實現各種姿態的調整控制。預定著陸點為19.51W,44.12N,海拔為-2641m。
2 問題分析
粗避障段,要考慮平坦度和燃料兩個方面,著陸區的選擇即要滿足平坦性的要求,又要考慮著陸過程所耗燃料的問題,通過使用matlab軟件對高程圖分析,通過區域內高度標準差來反映該區域的平坦度,在滿足平坦度條件的各個區域中選擇以實現燃料最優。
3 模型假設
(1)假設月球為一個均勻的球體;
(2)假設其他天體對飛船無影響;
(3)假設月球自轉對飛船無影響。
4 模型建立與求解
4.1 模型的建立
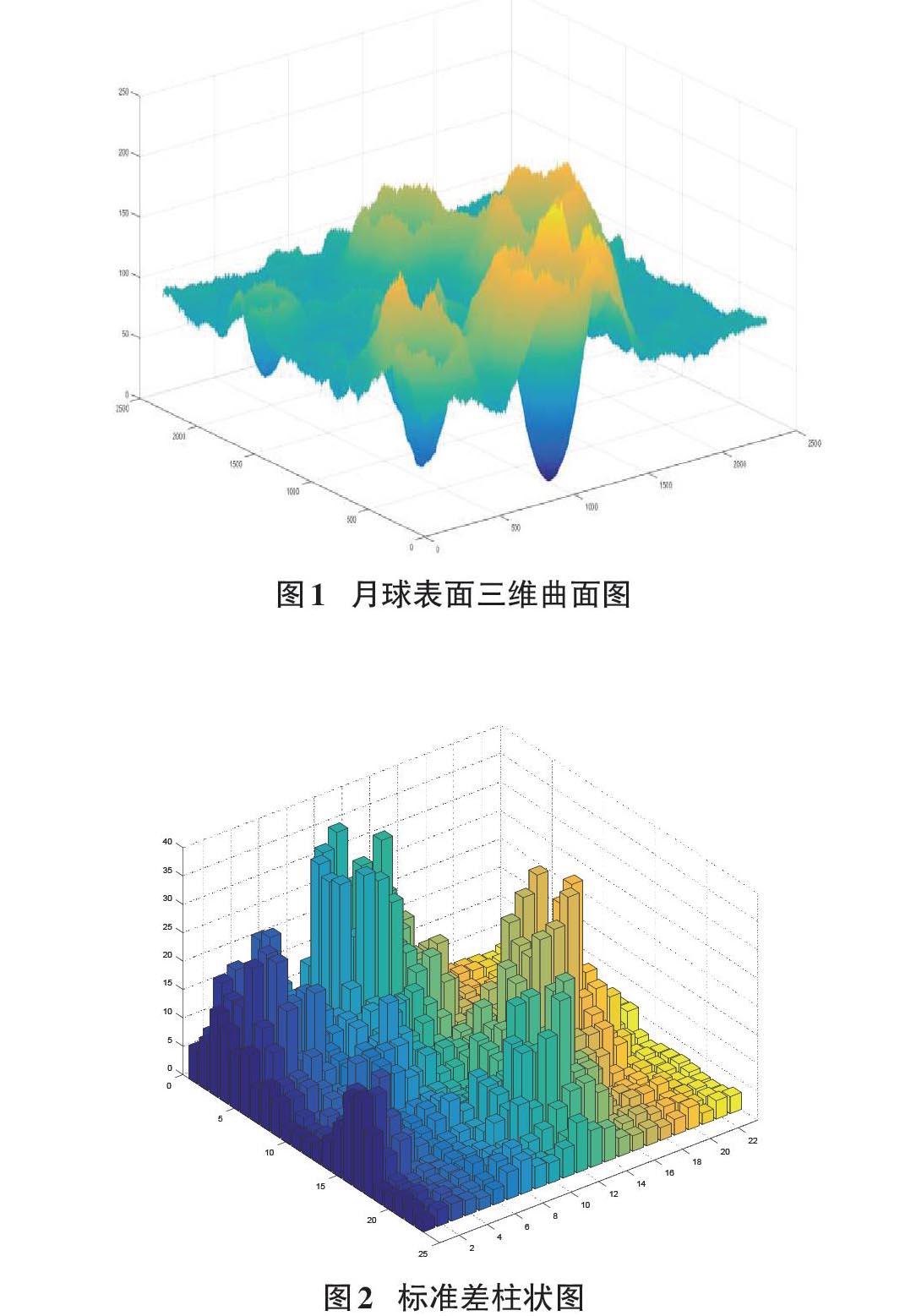
粗避障階段,取得月球表面光學成像敏感圖片,照片區域面積為[2300m×2300m],通過matlab對高程圖的數據讀入可得到該區域的三維曲面圖,以俯視圖的左下點為原點建立空間直角坐標系,如下圖1。
由圖可知,我們需要找到該區域中較平坦的區域,對此我們根據該地區的面積大小及接下來的精避障階段的區域面積決定將其分為[23×23]個模塊,每個模塊面積為[100m×100m]通過matlab實現對其中每個模塊的標準差求解,通過設置閾值,找出相對平坦的區域,在這些區域中尋找最近的區域,以達到在保證著陸安全的前提下,做到燃料最省。
我們可得[23×23]個區域標準差的矩陣,其平面圖及柱狀圖如圖2。
將標準差矩陣歸一化,可得該地區的平坦程度矩陣,可將分數大于99的區域視為相對平坦區域,并在這些區域中尋找距離飛船投影點最近的區域,即距離點[12,12]最近,以上過程由matlab實現。
4.2 模型的優化
通過以上模型我們可以尋得576個區域中最優區域,但是區域的固定劃分會限制我們尋找的范圍,所以我們將區域劃分變為區域的掃描,每次掃描面積與劃分的面積相同為[100m×100m],每次掃描過后將該區域的標準差記錄,由于軟件計算速度有限,我們將掃描區域平移距離定為[50m],待水平方向上的[100m×2300m]的區域掃描完畢后,豎直方向平移[50m],并重復上述過程,通過matlab實現上述過程并獲得一個新的標準差矩陣,一個容量為[45×45]的矩陣,并重復之前的模型的求解過程,得到區域最優解,標準差曲面圖及柱狀圖如圖3。
4.3 模型的求解
平坦區域坐標數據如下。
由于衛星的初始位置在俯視平面圖的幾何中心(坐標為[22,22]),為降低燃料消耗,故在這14個小方塊中尋找距離[22,22]最近的小方格,經計算可得最優著陸點的坐標為[1,33]。
參考文獻:
[1] 王大秩.月球引力轉彎軟著陸的制導控制研究[J].中國空間科學技術,2000,5(17).
[2] 張洪華.嫦娥三號自主避障軟著陸控制技術[J].中國科學,2014,44(6).
[3] 趙美中.“嫦娥三號”軟著陸最優降落位置及能量控制研究[J].襄陽職業技術學院學報,2015(2).
[4] 馬克茂.登月艙上升段最優軌跡設計[J].中國空間科學技術,2013,2(54).
【通聯編輯:代影】
