基于Matlab的改進自適應算法性能分析
2019-08-12 01:27:59毛耀東
電腦知識與技術 2019年16期
毛耀東

摘要:變步長自適應濾波算法通過對誤差和步長因子建立函數關系,在誤差大的時候使用大步長來加快收斂速度,誤差小的時候使用小步長保證收斂穩定性。為了進一步提高算法性能,在原有函數模型的基礎上,提出一種基于Sigmoid函數的新的變步長LMS(Least Mean Square,最小均方誤差)算法,并通過仿真確定各參數的最佳取值。仿真結果表明,和現有的變步長濾波算法及傳統固定步長算法相比,在收斂速度和濾波效果上有了明顯的提高。
關鍵詞:自適應算法;變步長;最小均方;Sigmoid函數;收斂性能
中圖分類號:TP301? ?文獻標識碼:A
文章編號:1009-3044(2019)16-0266-05
開放科學(資源服務)標識碼(OSID):
Abstract: The variable step size adaptive filtering algorithm establishing a functional relationship between the error and the step size factor. When the error is small, the small step length is used to ensure the convergence stability.otherwise,large step size is used to accelerate the convergence speed by? In order to further improve the performance of the algorithm,On the basis of the original function model, a new variable step size LMS (Least Mean Square) algorithm based on Sigmoid function? is proposed, and the optimal values of each parameter are determined by simulation. The simulation results show that compared with the existing variable step size filtering algorithm and the traditional fixed step size algorithm, the convergence speed and filtering effect are obviously improved.
Key words: adaptive algorithm; variable step size; least mean square; Sigmoid function; Convergence performance
自適應濾波器是能夠自動調節參數的濾波器,其參數會隨著環境的變化而變化。主要應用場景為系統辨識,信道均衡,信號增強和預測。隨著微電子等硬件技術的高速發展,自適應濾波器技術也不斷完善。相比于經典濾波,自適應濾波不需要知道太多的先驗信息[1],因而其應用范圍更為廣泛。自適應濾波中最具代表性的是LMS算法和RLS算法。LMS算法計算量小,但是收斂速度慢。雖然RLS算法的濾波效果和收斂速度比LMS算法好,但是在濾波器階數較大時,RLS算法的計算量很大,為O[[n2]]。因此提出一種在算法收斂過程中自動調節步長因子的變步長LMS算法,該算法以Sigmoid函數為模型,與現有變步長LMS算法相比,誤差小的時候,步長具有更小的變化率,因而收斂穩定性進一步提高。
1 自適應濾波算法的原理分析
1.1 自適應濾波器的一般結構
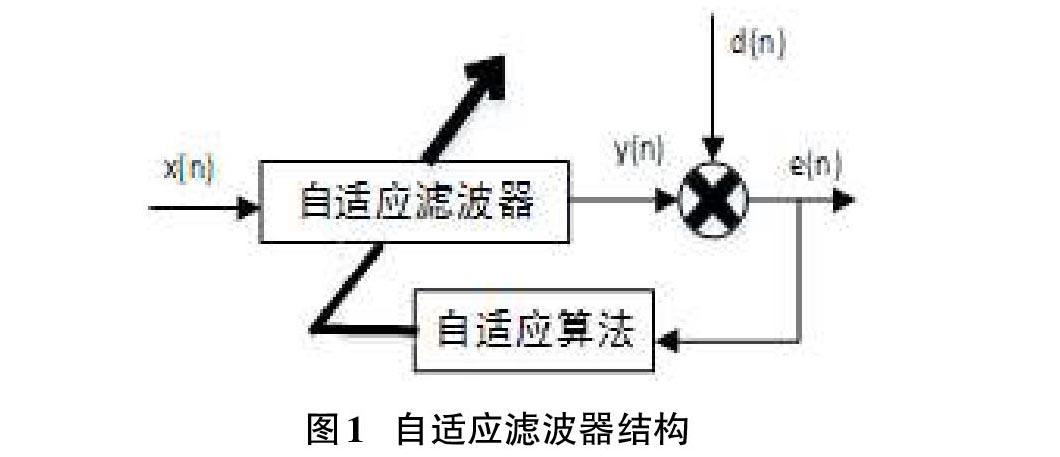
自適應濾波器一般是階數固定的橫向濾波,它包括四個端口:n時刻的輸入信號x(n),期望信號d(n),輸出信號y(n)和誤差信號e(n)。通過y(n)與d(n)的差e(n)來自動調節濾波器的參數,使得濾波器系數不斷優化。自適應濾波器的結構如圖1所示。
1.2 自適應濾波算法
自適應濾波算法有兩大基本類:LMS和RLS。LMS算法中除了固定步長算法外,還有變步長的LMS算法和變換域的LMS算法[2]。前者通過在誤差信號和步長之間建立函數關系來調節步長[3],后者將時域信號正交變換得到變換域信號,并在變換域中使用自適應算法。RLS算法充分利用之前的輸入矢量x(k)和d(k),通過設定一個遺忘因子來決定各時期數據的權重,來實現算法的快速收斂。
1.2.1 LMS自適應濾波算法
LMS自適應濾波器一般采用橫向FIR結構,如圖2所示。
各參數分別為:
X(n)為n時刻的輸入信號矢量,W(n)為n時刻的濾波器系數,N為濾波器階數。通過計算輸出信號和期望信號,可得估計誤差:
利用快速下降法[4]可得濾波器系數更新方程為:
U是步長因子,取正的常數。為了滿足算法的收斂性,u需要滿足:
1.2.2 RLS自適應濾波算法
LMS算法由于沒有利用過去的信息。導致梯度估計誤差大,算法收斂速度慢,如果自相關矩陣的逆矩陣不具有正定性還會導致算法發散。RLS算法在求均方誤差時觀測數據的長度是變化的,越久之前的數據,其權系數越小,因而RLS算法在非平穩環境下的濾波效果要由于LMS算法。RLS具體算法流程如下:
其中[SD(n)]表示X(n)自相關矩陣的逆,δ表示輸入信號功率估計的倒數,[λ]表示遺忘因子,它表示之前的數據在當前時刻的影響力,距離現在越久的數據,對濾波器系數的印象里越小。因而在非平穩信號濾波方面,該算法也能有效。
2 改進的LMS算法
為了解決傳統LMS算法的問題,很多變步長LMS算法被提出,文獻[9]提出了一種基于小波分解的變步長LMS濾波算法,根據小波分解的多分辨率分析特性,將信號與噪聲正交分解在不同的頻率范圍,然后對各個頻段的信號進行濾波,最后重構得到濾波信號,是一種頻率濾波波的算法。文獻[10]提出了一種濾波器階數可變的LMS算法,通過引入漏因子,將抽頭長度假設成一個假分數進行更新,再對更新后的數值極性處理,變成真實的抽頭長度,并將變步長的思想用到變抽頭長度算法中。文獻[11]針對可見光通信的多徑干擾問題,提出一種反正切函數的變步長自適應LMS算法,通過分析室內信道模型,建立最小均方算法步長因子的函數,然后對反正切函數進行平移變換,建立了步長與誤差的非線性關系。
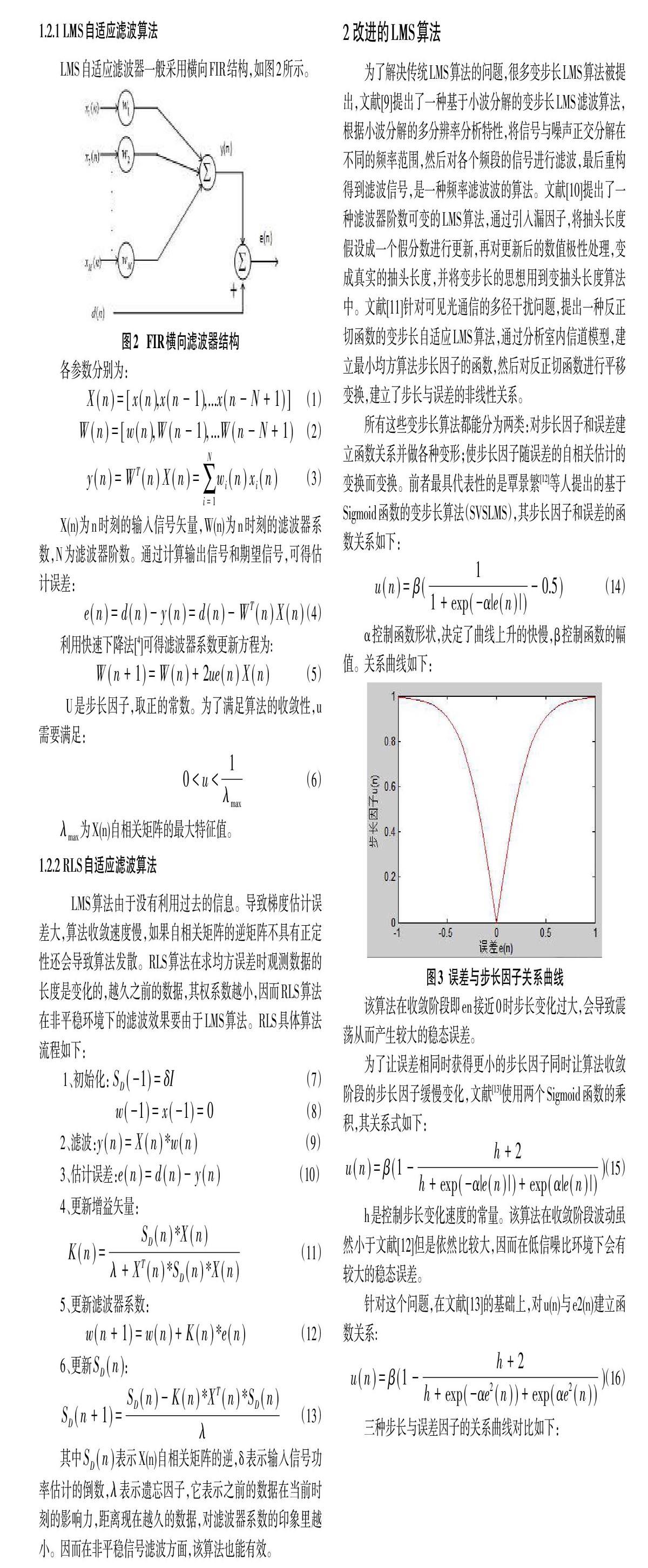
所有這些變步長算法都能分為兩類:對步長因子和誤差建立函數關系并做各種變形;使步長因子隨誤差的自相關估計的變換而變換。前者最具代表性的是覃景繁[12]等人提出的基于Sigmoid函數的變步長算法(SVSLMS),其步長因子和誤差的函數關系如下:
三種步長與誤差因子的關系曲線對比如下:
各參數設置如下表所示:
3 算法仿真及分析
設定有用信號為三個不同頻率的正弦信號之和,加入隨機序列噪聲之后得到含噪信號。
3.1 步長和參數α,β,h對收斂性能的影響
1)固定h和β,觀察α取不同值時的關系曲線,從圖6可以看到,α越大,收斂速度越快,但是收斂后的穩定性越差,這符合自適應LMS算法特性。繼續增大α,收斂速度沒有明顯變化。
2)固定α和h,觀察β取不同值時的關系曲線,如圖7所示。和α的作用相似,β越大,收斂速度越快但是收斂后穩定性越差,繼續增加β的值收斂速度并不會明顯加快。
3)固定α和β,觀察h取不同值時的關系曲線,從圖8可以看到,h對關系曲線的影響可以忽略不計。
3.2 濾波器階數對收斂性能的影響
可以看到,階數越高,系數會越低,濾波器階數不會影響收斂速度在收斂速度上也和上一節的結論相同。
3.3 各算法的濾波效果對比
從濾波效果圖上,四種算法都能得到和原信號差不多的波形。表2直觀反映了濾波性能,可以看到,文獻[12]的變步長算法相比于原LMS算法,在信噪比上有明顯所提高,同時RMSE也下降了下降了18%左右。基于Sigmoid函數的文獻[13]在信噪比上比起文獻[12]有輕微提高,同時RMSE有所下降。針對文獻[13]的改進算法,和文獻[13]相比,信噪比有明顯提高,而RMSE也有明顯下降,證明了改進算法在濾波效果上的可行性。
4 結束語
在原有變步長LMS算法的基礎上,通過調整步長因子和誤差的函數關系,提出一種以Sigmoid函數為模型的改進LMS算法,該算法能夠保證較快的收斂速度和較強的收斂穩定性,解決了原有LMS算法在收斂后的震蕩過大問題。仿真結果表明,改進的算法和已有的變步長LMS算法相比,信噪比有明顯提升,而且均方誤差也明顯下降,因此對時變信道中的低信噪比信號能取得不錯的濾波效果。
參考文獻:
[1] 高建輝. LMS自適應濾波器的設計理論研究[J]. 信息技術, 2011,(8):112-115.
[2] 耿妍,張端金. 自適應濾波算法綜述[J]. 信息與電子工程,2008(4):315-320.
[3] Raymond H K, Edward W J.? A variable step size LMS algorithm[J].IEEE Trans. on Signal Processing, 1992,40:1633-1642.
[4] 張紅梅,韓萬剛. 一種新的變步長LMS自適應濾波算法研究及其應用[J].儀器儀表學報,2015,36 (8):1822-1830.
[5] Park d J. Jun B E. Self perturbing recursive least squares algorithm with fast tracking capability[J].Electronics Letter. 1992,28(6):558-559.
[6] 常鐵原,王月娟. 一種具有快速跟蹤能力的改進RLS算法研究[J]. 計算機工程與應用. 2011,47(23):147-150.
[7] Elnashar Ayman.Elnoubi Said. EI-Mikati Hamdi.Performance analysis of blind adaptive MOE multiuser receivers inverse QRD-RLS algorithm[J]. IEEE.Transactions on Circuits and Systems, 2008,55(1):398-411.
[8] Kwang Seop Eom,Byung Eul Jun,DonG Jo Park. Fast Tracking and noise immunised RLS algorithm based on Kalman filter[J].? Electronics Letter, 1996,32 (25):2311-2312.
[9] 段帥軍.基于小波分解的變步長LMS降噪算法研究[J].軟件,2018,39(12):155-158.
[10] 雷翼龍,余濤.一種基于變抽頭長度的變步長LMS算法[J].電子測試,2018(10):55-57.
[11] 張進玉,王翀,楊宏,李國輝,趙瑤,王姣.基于反正切函數的可見光通信LMS均衡算法[J].光通信技術,2018,42(5):59-62.
[12] 覃景繁,歐陽景正.一種新的變步長LMS自適應濾波算法[J].數據采集與處理 ,1997(3):171-194.
[13] 陳泳,田金鵬,劉燕平.一種新的變步長LMS自適應濾波算法[J].電子測量技術,2015,38(04):27-31
【通聯編輯:梁書】
