時間誤差對預(yù)警機協(xié)同制導(dǎo)導(dǎo)彈的影響
2019-08-13 01:22:04李美紅喬永杰
兵器裝備工程學(xué)報 2019年7期
關(guān)鍵詞:信息
李美紅,喬永杰,楊 喆
(中國電子科學(xué)研究院, 北京 100041)
在現(xiàn)代超視距空戰(zhàn)中,通常由預(yù)警機為作戰(zhàn)平臺提供遠距離目標(biāo)信息,并引導(dǎo)作戰(zhàn)平臺進行武器發(fā)射,以完成協(xié)同作戰(zhàn)任務(wù)。美國NIFC-CA系統(tǒng)將航母、艦船、艦載機等作戰(zhàn)單元進行無縫聯(lián)接,構(gòu)成一體化打擊體系,探測平臺對目標(biāo)進行火控級的跟蹤,并將高精度的目標(biāo)信息在各平臺之間共享,傳感器和武器系統(tǒng)直接交聯(lián)并進行協(xié)同作戰(zhàn)。然而網(wǎng)絡(luò)化作戰(zhàn)體系中,不同作戰(zhàn)平臺之間不可避免地存在時間同步誤差和信息傳輸時延,從而對多平臺協(xié)同作戰(zhàn)產(chǎn)生嚴(yán)重影響,需要進行深入研究。
文獻[1-3]研究了雙機協(xié)同攻擊時的指令瞄準(zhǔn)建模與精度、指令修正慣性中制導(dǎo)方法和預(yù)警機-戰(zhàn)斗機-導(dǎo)彈的打擊鏈模型;文獻[4]研究了硬件在回路仿真中不可避免的時間延遲效應(yīng),以及數(shù)字控制器和硬件在回路的仿真器之間的時間延遲量;文獻[5]研究了中遠程紅外末制導(dǎo)導(dǎo)彈的制導(dǎo)信息的周期指標(biāo),按照紅外導(dǎo)引頭探測性能給出了數(shù)據(jù)鏈周期的確定原則;文獻[6]研究了目標(biāo)指示信息延遲對反艦導(dǎo)彈末制導(dǎo)雷達參數(shù)裝訂的影響;文獻[7]分析了影響直升機載空空導(dǎo)彈中末交接時截獲概率的主要誤差源及其影響。而關(guān)于時間誤差對預(yù)警機協(xié)同制導(dǎo)空空導(dǎo)彈的中末制導(dǎo)交接影響研究較少,本文以預(yù)警機引導(dǎo)戰(zhàn)斗機發(fā)射遠程空空導(dǎo)彈為例,分析協(xié)同作戰(zhàn)過程中各階段的時間誤差特性,及其造成的導(dǎo)彈中制導(dǎo)段末端散布誤差、目標(biāo)信息誤差和導(dǎo)引頭指向誤差,通過仿真計算導(dǎo)引頭截獲概率隨時間誤差的變化情況,從而確定協(xié)同制導(dǎo)過程中時間誤差的允許范圍。
1 預(yù)警機協(xié)同制導(dǎo)過程
“預(yù)警機-戰(zhàn)斗機-導(dǎo)彈”形成打擊鏈,進行協(xié)同作戰(zhàn)的概念如圖1所示。
圖1 預(yù)警機協(xié)同制導(dǎo)遠程空空導(dǎo)彈打擊鏈
首先,預(yù)警機對遠距離目標(biāo)進行探測識別,確定為敵方目標(biāo)后,將計算得到的目標(biāo)位置、速度、方向等信息,通過機間數(shù)據(jù)鏈發(fā)送給戰(zhàn)斗機;然后,戰(zhàn)斗機根據(jù)目標(biāo)信息進行解算,滿足發(fā)射條件時將目標(biāo)參數(shù)裝訂到導(dǎo)彈,進入攻擊區(qū)后發(fā)射導(dǎo)彈,并將導(dǎo)彈的初始信息上傳到預(yù)警機。預(yù)警機繼續(xù)為戰(zhàn)斗機提供遠程目標(biāo)指示,或直接與導(dǎo)彈建立通信進行協(xié)同制導(dǎo)。導(dǎo)彈在發(fā)射后的初始段按程序控制飛行;中段根據(jù)接收到的目標(biāo)信息按預(yù)定的導(dǎo)引律飛行,到達中末段制導(dǎo)交接點附近,或滿足導(dǎo)引頭最大探測距離時,導(dǎo)引頭開機搜索,捕獲目標(biāo)后進入末制導(dǎo),導(dǎo)彈按設(shè)定的制導(dǎo)律飛行,直到命中目標(biāo)。
2 時間誤差模型
預(yù)警機引導(dǎo)戰(zhàn)斗機發(fā)射導(dǎo)彈的過程中,涉及的時間誤差如圖2所示。
2.1 時間同步誤差
預(yù)警機與戰(zhàn)斗機協(xié)同作戰(zhàn)之前必須先進行時間統(tǒng)一,將兩平臺及各自分系統(tǒng)的信息統(tǒng)一到同一時間基準(zhǔn),以確保后續(xù)準(zhǔn)確有效的導(dǎo)彈發(fā)射和協(xié)同制導(dǎo)。
協(xié)同作戰(zhàn)的預(yù)警機和發(fā)射平臺,通過自同步和時延測量、實時校準(zhǔn)及高穩(wěn)度時鐘源等方法進行時間同步,或采用戰(zhàn)術(shù)數(shù)據(jù)鏈以往返計時報文的方法進行時間同步,精度可達μs級。
圖2 打擊鏈中的時間誤差模型
導(dǎo)彈發(fā)射前,載機與導(dǎo)彈進行傳遞對準(zhǔn),其中包含時間對準(zhǔn)項的內(nèi)容,該項信息存在誤差;又由于機載慣性導(dǎo)航系統(tǒng)的參數(shù)一般先傳給機載火控系統(tǒng)進行信息處理,再傳給彈載慣性導(dǎo)航系統(tǒng),使得傳遞對準(zhǔn)這一過程消耗一定的時間,進一步增大了載機與導(dǎo)彈的時間同步誤差。
如果預(yù)警機直接制導(dǎo)導(dǎo)彈,兩者需建立時空基準(zhǔn),但不可避免地存在一定的時間同步誤差。預(yù)警機向?qū)棸l(fā)送的目標(biāo)信息包含時間戳信息,但前提是兩者之間已進行時間對準(zhǔn),或已知兩者之間的時間同步誤差。
從預(yù)警機探測目標(biāo)一直到導(dǎo)彈離機,主要的時間延遲項如表1所示,總時延為∑τi。
3 截獲概率計算
3.1 導(dǎo)彈位置誤差
彈載慣性導(dǎo)航系統(tǒng)具有一定的測量誤差,其測量誤差隨時間積累而增大,導(dǎo)致導(dǎo)彈所測自身位置參數(shù)存在誤差,中制導(dǎo)段末端的導(dǎo)彈定位誤差ΔPm為:
ΔPm=(Δxm,Δym,Δzm)=Vf(ta+tIa)+tf·δm
(1)
式(1)中,Vf為飛機在傳遞對準(zhǔn)時的速度;δm為彈載慣性導(dǎo)航系統(tǒng)的定位精度;tIa為初始對準(zhǔn)中時間對準(zhǔn)項信息的誤差;ta為傳遞對準(zhǔn)過程消耗的時間;tf為導(dǎo)彈飛行時間。
導(dǎo)彈位置估計誤差的方差為:
(2)
3.2 目標(biāo)位置誤差
如果預(yù)警機為戰(zhàn)斗機提供目標(biāo)指示,可能的最大時延為表1中各時延項之和;如果預(yù)警機直接制導(dǎo)導(dǎo)彈,可能的最大時延為兩者之間的時間同步誤差,與信息傳輸周期、發(fā)送和接收時延之和。如果在信息延遲時間td內(nèi)目標(biāo)進行機動,將產(chǎn)生目標(biāo)位置誤差;對目標(biāo)的機動估計誤差,計算如下[8]:
(3)
式(2)中,nt為目標(biāo)過載;vt為目標(biāo)速度。目標(biāo)位置估計誤差的方差可表示為:
(4)

表1 時間延遲項
3.3 截獲概率模型
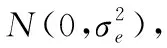
空空導(dǎo)彈在中末段制導(dǎo)交接時,導(dǎo)引頭截獲目標(biāo)包括角度截獲、距離截獲和速度截獲,距離截獲要求彈目距離小于導(dǎo)引頭最大探測距離,角度截獲要求目標(biāo)實際位置處在導(dǎo)引頭的視場角范圍。導(dǎo)彈在中、末制導(dǎo)交接時,目標(biāo)指示誤差如圖3所示,中制導(dǎo)結(jié)束時導(dǎo)彈彈體縱軸指向Ox方向,導(dǎo)引頭軸線指向Rs(圖中虛線表示導(dǎo)引頭視場),與彈體縱軸的夾角Φ為目標(biāo)指示角。目標(biāo)相對導(dǎo)彈的視線為Rm,則Rs與Rm的夾角Φa即為目標(biāo)指示角度誤差[9]。設(shè)導(dǎo)引頭波束寬度為±λ,如果Φa<λ,則認(rèn)為是導(dǎo)引頭角度截獲目標(biāo)。
將目標(biāo)指示誤差Φa在導(dǎo)引頭平臺系的Oxsyszs內(nèi)投影,得到在導(dǎo)引頭視線坐標(biāo)系上,導(dǎo)引頭目標(biāo)指示誤差在Oys、Ozs軸上的分量Φey、Φez,假設(shè)隨機變量Φey、Φez服從均值為零的正態(tài)分布,其概率密度函數(shù)分別為:
(5)

(6)
(7)

(8)

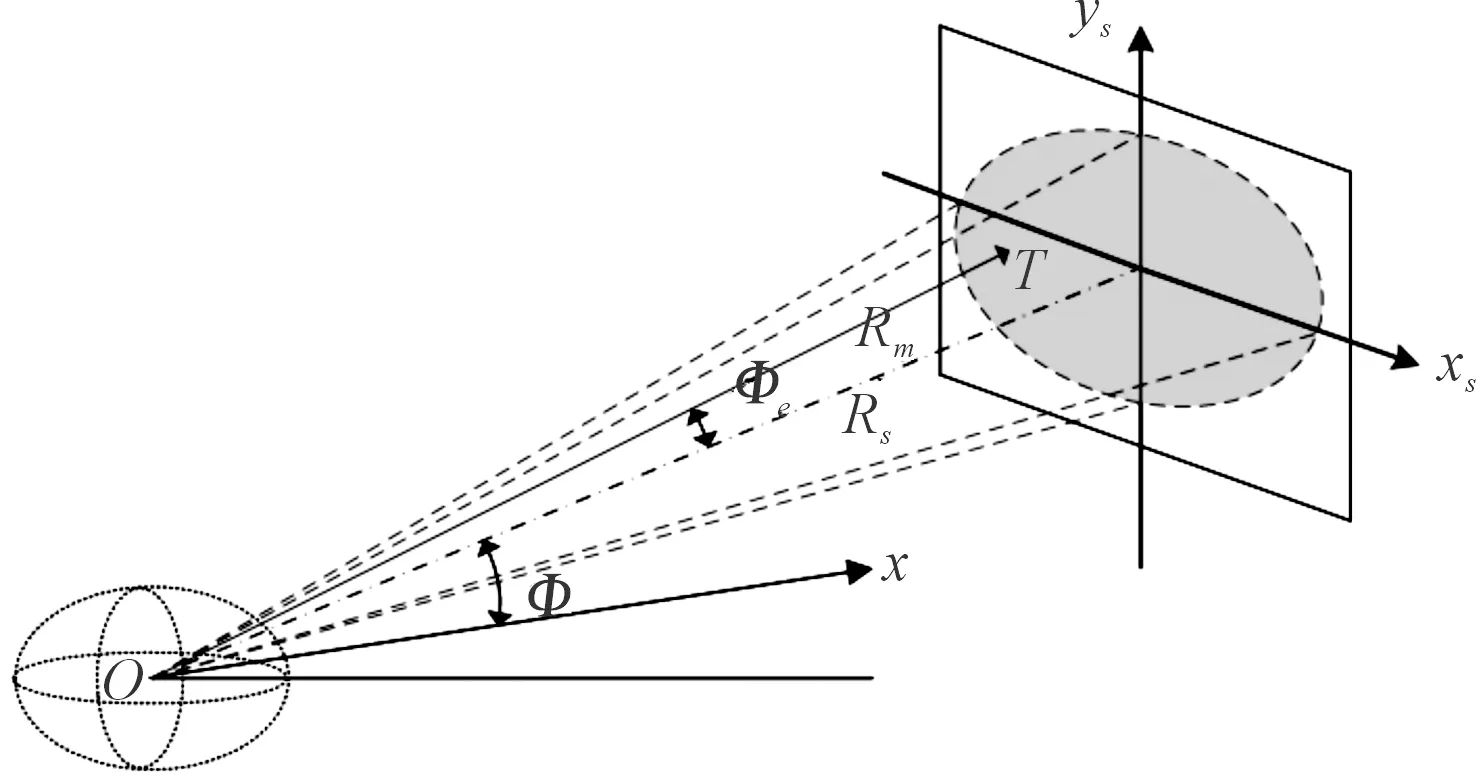
圖3 導(dǎo)引頭指示誤差示意
4 仿真分析
4.1 仿真條件
設(shè)目標(biāo)的初始位置為(300 km,50 km,10 km),初始速度為(-270 m/s,0 m/s,0 m/s),在發(fā)現(xiàn)威脅前作勻速直線運動;發(fā)現(xiàn)威脅后立即進行機動規(guī)避,目標(biāo)加速度可達20 m/s2,目標(biāo)飛機的最大過載為8。導(dǎo)彈平均速度設(shè)為400 m/s,彈道傾角為θ=0.38°,偏航角為ψ=9.5°,導(dǎo)彈發(fā)射離機后1~2 s后進入程序控制階段,中段采用比例導(dǎo)引,比例導(dǎo)引系數(shù)選為3,末段采用主動雷達尋的制導(dǎo),導(dǎo)引頭波束寬度5°,探測距離為30 km。
4.2 結(jié)果分析
4.2.1 目標(biāo)未發(fā)現(xiàn)威脅
理想情況下,假設(shè)敵機未發(fā)現(xiàn)威脅,保持勻速飛行。如圖4所示,導(dǎo)彈飛行約163 km后,到達攻擊區(qū)附近,敵機進入導(dǎo)引頭最大探測范圍時,導(dǎo)引頭開機,可見目標(biāo)散布范圍基本落在導(dǎo)引頭搜索區(qū)域內(nèi),滿足導(dǎo)彈順利轉(zhuǎn)入末制導(dǎo)的條件。
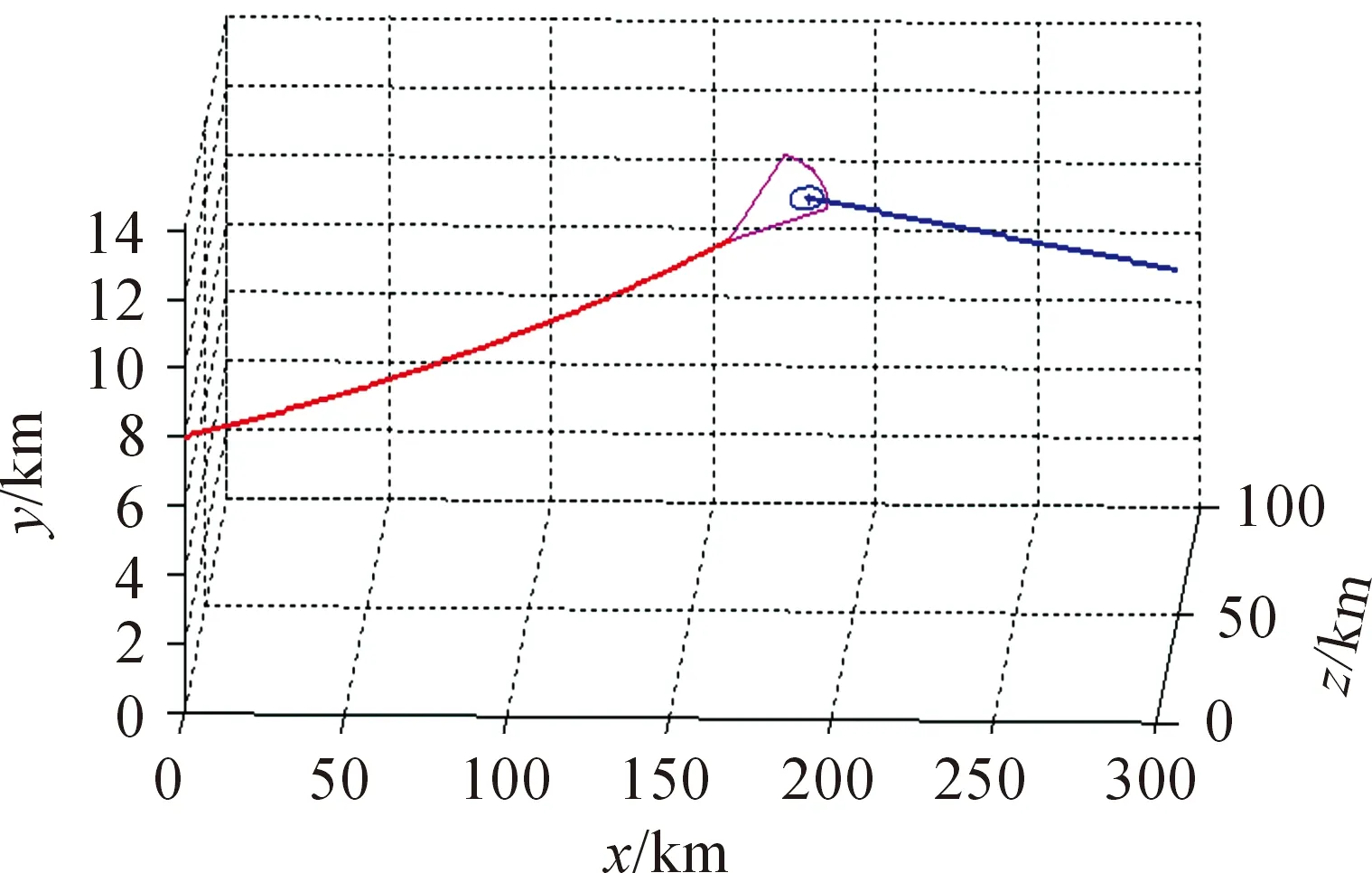
圖4 目標(biāo)未發(fā)現(xiàn)威脅時的彈道
4.2.2 目標(biāo)發(fā)現(xiàn)威脅
假設(shè)目標(biāo)在導(dǎo)彈距其50 km時發(fā)現(xiàn)威脅,立即采用橫向轉(zhuǎn)彎進行規(guī)避,如圖5所示,可見目標(biāo)位于導(dǎo)引頭搜索區(qū)域邊緣,截獲概率降低,不能保證導(dǎo)彈順利轉(zhuǎn)入末制導(dǎo)。
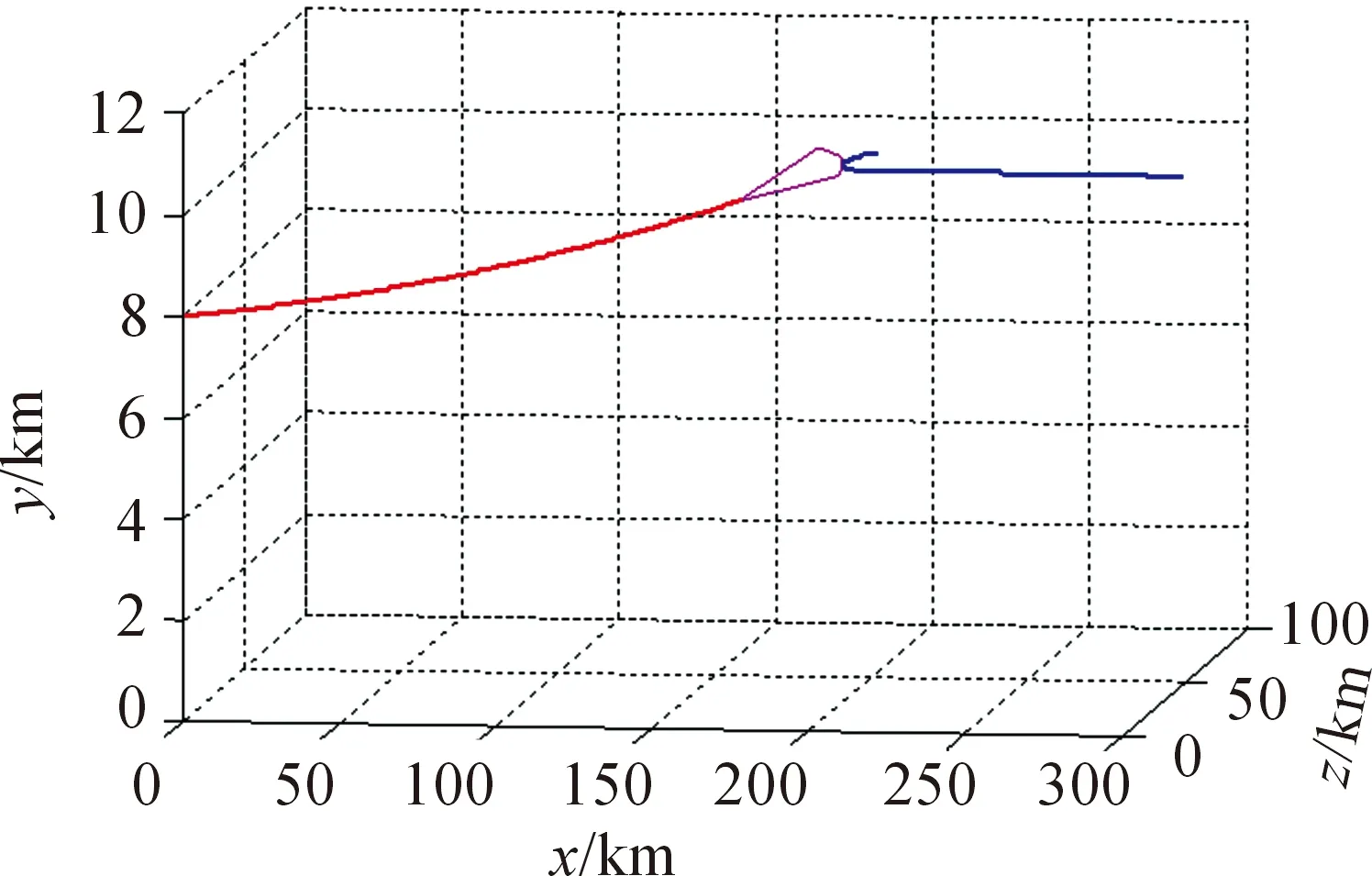
圖5 目標(biāo)加速轉(zhuǎn)彎機動時的彈道
將初始設(shè)置參數(shù)代入公式,可得時間誤差和導(dǎo)引頭截獲概率的關(guān)系,如圖6所示。

圖6 時間誤差對導(dǎo)引頭截獲概率的影響
由圖6可見,若目標(biāo)未發(fā)現(xiàn)來襲導(dǎo)彈并一直做勻速運動,無時延時導(dǎo)引頭對目標(biāo)的截獲概率為99.9%;時延為3.7 s時導(dǎo)引頭截獲概率為95.4%,截獲概率隨時間誤差增大到而降低,時延為4 s時降低到89.4%;若目標(biāo)發(fā)現(xiàn)威脅后以8 g過載進行轉(zhuǎn)彎,時延為1.4 s時導(dǎo)引頭截獲概率為90.8%,小于要求的截獲概率95%;若目標(biāo)通過加速并轉(zhuǎn)彎進行規(guī)避,時延為0.1 s時截獲概率就降低到80%以下,與圖5中的彈道仿真結(jié)果吻合,可見目標(biāo)做大機動時,時間誤差將直接影響導(dǎo)彈轉(zhuǎn)入末制導(dǎo),降低命中概率。
5 結(jié)論
1) 如果敵機探測能力較弱,同時我方提高隱身性能,使敵機難以發(fā)現(xiàn)威脅,時間誤差小于4 s可基本滿足轉(zhuǎn)入末制導(dǎo)的條件。2) 如果敵機的探測能力較強,發(fā)現(xiàn)威脅后進行轉(zhuǎn)彎機動,時間誤差需限制在2~3 s;目標(biāo)具有很高的機動性時要求時間精度達到秒級,由于較難命中,需考慮多彈多次攔截等其他戰(zhàn)術(shù)。3) 通過給定的初始條件,可計算時間誤差對導(dǎo)引頭截獲概率的影響;同時可根據(jù)截獲概率的要求,確定系統(tǒng)的時間精度指標(biāo)。實際作戰(zhàn)中還存在坐標(biāo)轉(zhuǎn)換誤差,考慮時空一致性的影響以及對協(xié)同制導(dǎo)過程中的時間誤差進行分配,將是下一步研究重點。
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創(chuàng)業(yè)(2009年10期)2009-10-08 04:52:00
數(shù)字社區(qū)&智能家居(2009年7期)2009-09-29 08:16:48
數(shù)字社區(qū)&智能家居(2009年11期)2009-06-25 04:30:34
數(shù)字社區(qū)&智能家居(2009年3期)2009-04-21 03:09:04
數(shù)字社區(qū)&智能家居(2009年2期)2009-03-27 04:33:44
數(shù)字社區(qū)&智能家居(2009年12期)2009-02-03 07:50:48
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32