某地機場初步勘測階段控制測量方法探討
2019-08-13 08:47:53琚根社呂國娟
科技資訊 2019年16期
琚根社 呂國娟
摘 ?要:近年來隨著測繪技術(shù)的日新月異,從而可以采用多種方法進(jìn)行控制網(wǎng)的測量,如導(dǎo)線測量法、三角測量法。此次機場初步勘測階段平面控制測量采用靜態(tài)GPS(全球衛(wèi)星定位系統(tǒng)) 控制測量法,設(shè)計為D級、E級平面控制網(wǎng),采用美國天寶R8GNSS雙頻雙星GPS接收機,GPS控制測量法與導(dǎo)線測量法、三角測量法相比,具有相對平面定位精度高、作業(yè)的速度快、經(jīng)濟效益好、測量時無需通視等優(yōu)點。高程控制測量采用三等、四等水準(zhǔn)測量,采用天寶DiNi03電子水準(zhǔn)儀進(jìn)行測量。為此,該文將論述一下此項目所采用的測量方法的合理性。
關(guān)鍵詞:測量手段 機場 ?控制測量 ?GPS網(wǎng) ?水準(zhǔn)測量
中圖分類號:P221 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻(xiàn)標(biāo)識碼:A ? ? ? ? ? ? ? ? ? ? ? ? 文章編號:1672-3791(2019)06(a)-0052-02
建立機場周邊均勻分布、逐級控制的GPS控制網(wǎng),并與附近C級點進(jìn)行聯(lián)測,形成D級網(wǎng),在D級網(wǎng)的基礎(chǔ)上加密,形成覆蓋整個測區(qū)的E級控制網(wǎng),此次設(shè)計D級GPS控制點數(shù)量為10個,E級GPS控制點數(shù)量為50個。四等水準(zhǔn)測量設(shè)計工作量為80km,并對飛機跑道附近6個GPS控制點進(jìn)行三等水準(zhǔn)測量。三等水準(zhǔn)測量設(shè)計工作量為70km。
此次測量的平面坐標(biāo)系統(tǒng)采用的是1980西安坐標(biāo)系,3°帶橫軸墨卡托投影,中央子午線111°,高程系統(tǒng)采用的是1985年國家高程基準(zhǔn)。
此次測量,為了保證觀測質(zhì)量,我們將對D級網(wǎng)的觀測時間大于1.5h。對E級網(wǎng)的觀測時間大于1h。采樣間隔10s,采用的GPS接收機為美國天寶R8GNSS雙頻雙星接收機,水平精度:±5mm+0.5ppmRMS,垂直精度:±5mm+1ppm RMS。水準(zhǔn)測量采用天寶DiNi03電子水準(zhǔn)儀進(jìn)行測量,15′內(nèi)自動補嘗,安平精度±0.2″。
由完全的獨立基線構(gòu)成的獨立環(huán),各獨立環(huán)的坐標(biāo)分量閉合差和全長閉合差應(yīng)符合Wx=δ、Wy=δ、Wz=δ,式中δ為相應(yīng)級別的規(guī)定中誤差(按平均邊長計算),n為閉合環(huán)邊數(shù)。復(fù)測基線的長度較差,不宜超過:ds≤,式中δ為相應(yīng)級別的規(guī)定中誤差(按平均邊長計算)。對于水準(zhǔn)測量,每測完一條水準(zhǔn)路線的測量,應(yīng)進(jìn)行往返測高差不符值及每千米水準(zhǔn)測量中誤差的計算,公式如下。
每完成一套附和水準(zhǔn)路線或閉合環(huán)的測量,并在加了尺長改正和水準(zhǔn)面不平行性改正后計算附合路線或閉合環(huán)的閉合差W。當(dāng)水準(zhǔn)網(wǎng)的水準(zhǔn)環(huán)超過20個時,還應(yīng)按環(huán)閉合差W計算每千米水準(zhǔn)測量全中誤差,公式如下。
水準(zhǔn)測量的視線長度、前后視距差、視線高度及測站觀測限差要符合規(guī)定。
1 ?GPS測量
1.1 野外觀測
利用GPS接收機對工區(qū)10個D級GPS點、50個E級GPS點進(jìn)行靜態(tài)觀測,并與附近C級點進(jìn)行聯(lián)測,形成D級網(wǎng),在D級網(wǎng)的基礎(chǔ)上加密形成覆蓋整個測區(qū)的E級控制網(wǎng)。
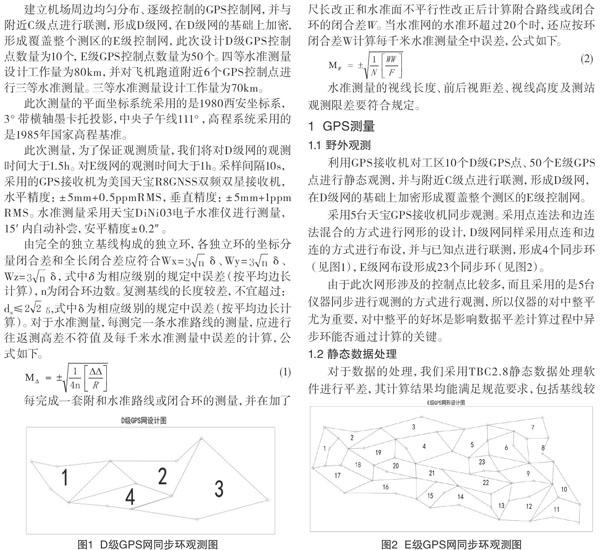
采用5臺天寶GPS接收機同步觀測。采用點連法和邊連法混合的方式進(jìn)行網(wǎng)形的設(shè)計,D級網(wǎng)同樣采用點連和邊連的方式進(jìn)行布設(shè),并與已知點進(jìn)行聯(lián)測,形成4個同步環(huán)(見圖1),E級網(wǎng)布設(shè)形成23個同步環(huán)(見圖2)。
由于此次網(wǎng)形涉及的控制點比較多,而且采用的是5臺儀器同步進(jìn)行觀測的方式進(jìn)行觀測,所以儀器的對中整平尤為重要,對中整平的好壞是影響數(shù)據(jù)平差計算過程中異步環(huán)能否通過計算的關(guān)鍵。
1.2 靜態(tài)數(shù)據(jù)處理
對于數(shù)據(jù)的處理,我們采用TBC2.8靜態(tài)數(shù)據(jù)處理軟件進(jìn)行平差,其計算結(jié)果均能滿足規(guī)范要求,包括基線較差、同步環(huán)閉合差、異步環(huán)閉合差。GPS靜態(tài)觀測網(wǎng)的質(zhì)量項目人員從野外選點、埋石、布網(wǎng)、實測以及最后的室內(nèi)解算,做到質(zhì)量層層把關(guān),確保靜態(tài)觀測數(shù)據(jù)的準(zhǔn)確性。外業(yè)天線量高采用3個方向天線高平均值。D級網(wǎng)觀測時間超過1.5h,E級網(wǎng)觀測時間超過1h。高度截止角15°,采樣間隔10s。并且,對GPS成果質(zhì)量,我們采用已知點進(jìn)行坐標(biāo)檢查的方法進(jìn)行質(zhì)量檢查。對于D級控制網(wǎng),我們采用3個已知點參與計算,其中2個進(jìn)行約束平差,1個作為檢核點,其檢核結(jié)果相差為5mm。對于E級控制網(wǎng),采用10個已知D級點參與平差計算。利用6個D級點進(jìn)行約束平差,4個點進(jìn)行進(jìn)行坐標(biāo)檢核,其檢核結(jié)果相差分別為9mm、7mm、11mm、6mm。
2 ?水準(zhǔn)測量
四等水準(zhǔn)測量完成工作量為81.66km,并對飛機跑道附近6個GPS控制點進(jìn)行三等水準(zhǔn)測量。三等水準(zhǔn)測量完成工作量為70.07km。
分別對三等水準(zhǔn)網(wǎng)和四等水準(zhǔn)網(wǎng)進(jìn)行獨立觀測,形成獨立的水準(zhǔn)觀測網(wǎng),并分別與已知二等水準(zhǔn)點聯(lián)測。整個施測過程嚴(yán)格按照規(guī)范設(shè)置儀器參數(shù),保證測量結(jié)果的準(zhǔn)確性。
對于水準(zhǔn)測量的精度檢驗,我們采用閉合差計算法、每千米水準(zhǔn)測量中誤差、全中誤差等精度指標(biāo)控制的同時,對三等和四等水準(zhǔn)網(wǎng)選取部分點進(jìn)行聯(lián)測來檢驗測量結(jié)果的準(zhǔn)確性,我們選取了機場跑道周邊的6個三等點和附近四等水準(zhǔn)點進(jìn)行聯(lián)測,其結(jié)果最大差值為1mm,完全能夠滿足機場測量規(guī)范。
3 ?結(jié)語
在項目的實施階段,我們較好地建立了機場建設(shè)擴建項目GPS控制網(wǎng),埋設(shè)50個E級GPS觀測點,10個D級GPS觀測點。用GPS靜態(tài)測量模式,成功解算D級、E級控制點成果,并對機場跑道兩頭6個GPS點進(jìn)行額外布網(wǎng)和解算。三等水準(zhǔn)測量完成工作量70.07km,四等水準(zhǔn)完成工作量81.66km。為此,在實施控制測量過程中,把握好每個工序是數(shù)據(jù)成功通過計算的基礎(chǔ),包括點位的選取、網(wǎng)形的布設(shè)、儀器高度的量取、嚴(yán)格的對中整平、接受時間長短的把握等是整個項目后期數(shù)據(jù)處理能否達(dá)到要求的基礎(chǔ)。
參考文獻(xiàn)
[1] 陶誠.工程測量中GPS控制測量平面與高程精度研究[J].華東科技:學(xué)術(shù)版,2017(8):22,24.
[2] 琚興華.GPS非差相位精密單點定位算法研究[J].全球定位系統(tǒng),2012,37(1):44-49.
[3] 劉平利,喬天榮,趙珂,等.GPS技術(shù)在鄭汴新區(qū)地面沉降觀測中的應(yīng)用[J].科技資訊,2017(21):81-82.
