基于物聯網的農機應急調度系統研究
2019-08-14 02:45:22張小花葉文超陳宗樂梁健權廖東東
廣東農業科學 2019年6期
張小花,葉文超,陳宗樂,梁健權,廖東東
(仲愷農業工程學院自動化學院,廣東 廣州 510225)
【研究意義】隨著農業機械化的深入發展,農機規模作業和跨區域作業已成為趨勢,農機現有作業模式面臨著嚴峻挑戰,農機作業呈現出信息發布滯后、作業效率低等問題,同時又缺乏有效的調度策略,造成農機資源配置不合理,制約了農機作業的健康發展。只有創建一個合適的調度平臺,才能讓各個相關部門與農機主對農田與農機的信息采集和干預,對農田與農業信息進行程序化管理。【前人研究進展】物聯網是新時代人們面臨的又一個發展機遇,然而如何將物聯網技術引入到智能農業中發揮其積極作用,對于推動農業生產方式的變革和服務于農業信息化顯得至關重要[1-4]。地理信息系統技術(GIS)、無線通信技術和全球定位系統(GPS)技術的發展為解決農機跨區作業和應急調度的決策支持提供了有效的支持[5-9]。李洪等[5]采用GPS、GSM技術以短信息的方式實現對農場農機合理調度并開發了基于GIS、GPRS(通用分組無線業務)和GPS的農機監控調度系統。也有學者以3S技術為基礎建立農機調度管理系統,以農機車輛監控系統的各項核心技術為主線,詳細論述GPS/GSM/GIS集成車輛監控系統所涉及的基本原理和實現方法,著重實現農機的物聯網化[8]。國外物聯網技術在精準農業上已經廣泛應用。AF?RDITA[10]使用 GIS和 GPS技術對農機作業實時記錄,能夠對農機作業進行調度導航和信息化管理,提高了作業效率和作業質量。【本研究切入點】前人研究雖然在農機作業過程起到了重要指導作用,實現了農機監控,提高了作業效率,但由于這些系統在實際作業中局限于操作者和管理人員的經驗,缺乏有效的輔助決策系統支撐,限制了農機科學監控調度的能力。在農機調度算法方面,目前研究集中在蟻群算法、大數據計算模型、緊急調配模型、時間窗模型等,這些模型都比較復雜,很難在實際系統中應用[11-15]。Android 平臺具有顯著的開放性及自由的開發環境而被廣泛應用,有相關學者開發了功能豐富、實用便捷的調度平臺[16-20]。這些平臺界面簡單,且車載端數據采集系統與手機終端動態交互能力差。【擬解決的關鍵問題】本文基于物聯網技術構建農機應急調度決策支持系統平臺,建立基于最短路徑調度模型,并應用Android平臺設計該調度系統的APP,實現該調度決策的實時化、遠程化、可視化及理論和實際相統一。
1 材料與方法
1.1 農機應急調度系統的總體架構
本研究構建基于物聯網的農機應急調度系統包括基于物聯網的監控平臺及基于最短路徑的應急調度模型。首先基于GPS/GPRS/GIS收集農機農田的信息并發送到監控平臺,建立監控中心的靜態和動態實時數據庫。利用應急調度模型建立相應的應急調度模型及調度規則,在此基礎上,應急調度系統的人機界面能夠得到動態調度指令及實時運行結果。其總體架構如圖1所示。
建立基于物聯網的監控平臺,需通過GIS、GPS、GPRS相結合實現農機的信息化。從而實時建立農田信息、農機的狀態信息、維修點信息、加油站信息等信息系統,以客觀、實時、準確地反映農機作業信息。在應急情況下,管理人員可以隨時掌握農業機具作業情況進行調度。根據GPS確定農機、農田的位置等信息,并通過GRPS網絡輸出數據到監控中心服務器,建立相應的數據庫。根據GIS地理信息系統,建立農田的地圖信息數據庫。基于物聯網的農機監控平臺的網絡拓撲圖如圖2所示。
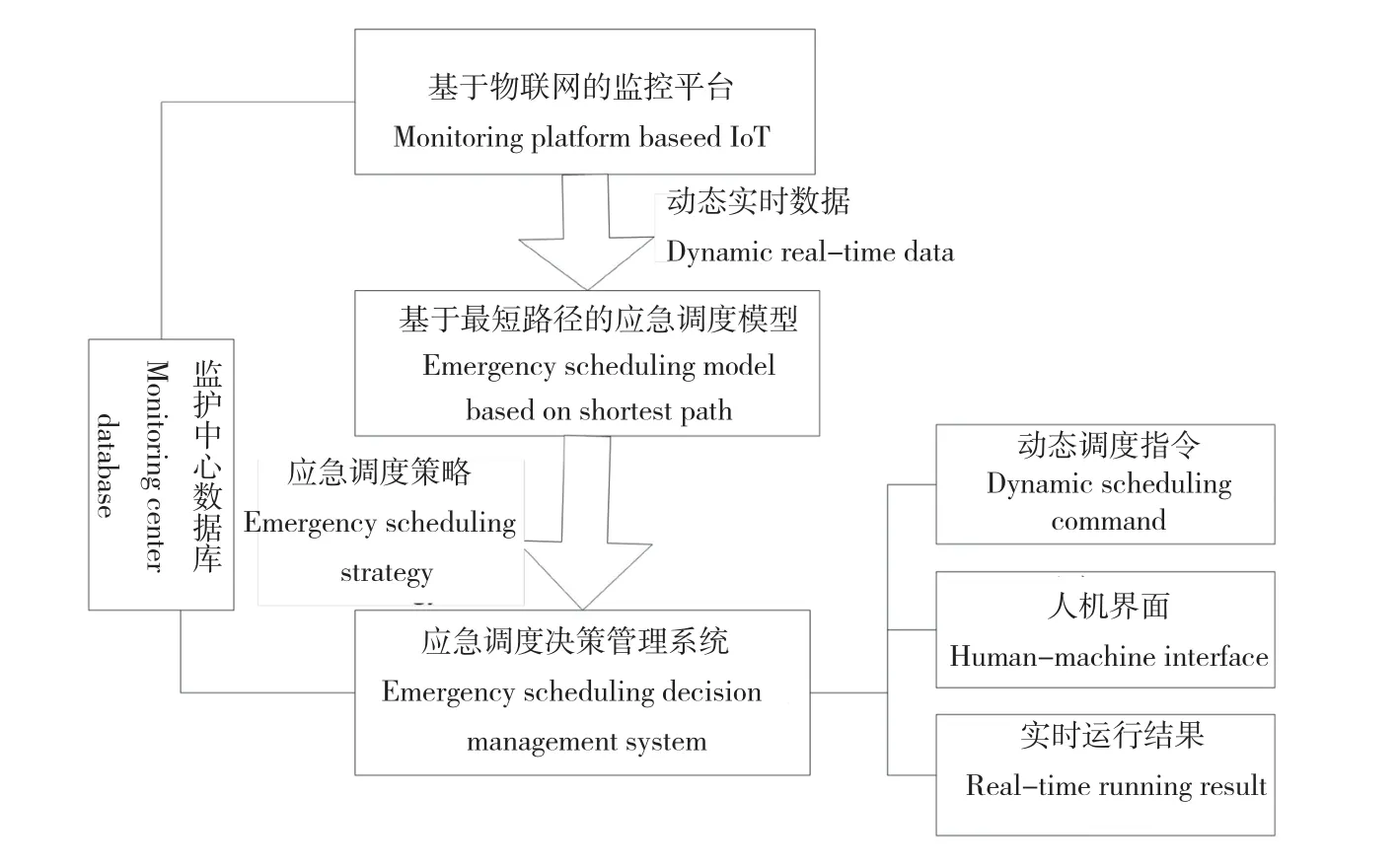
圖1 基于物聯網的農機應急調度決策支持系統平臺Fig.1 Agricultural machinery emergency scheduling decision support system platform based on Internet of Things
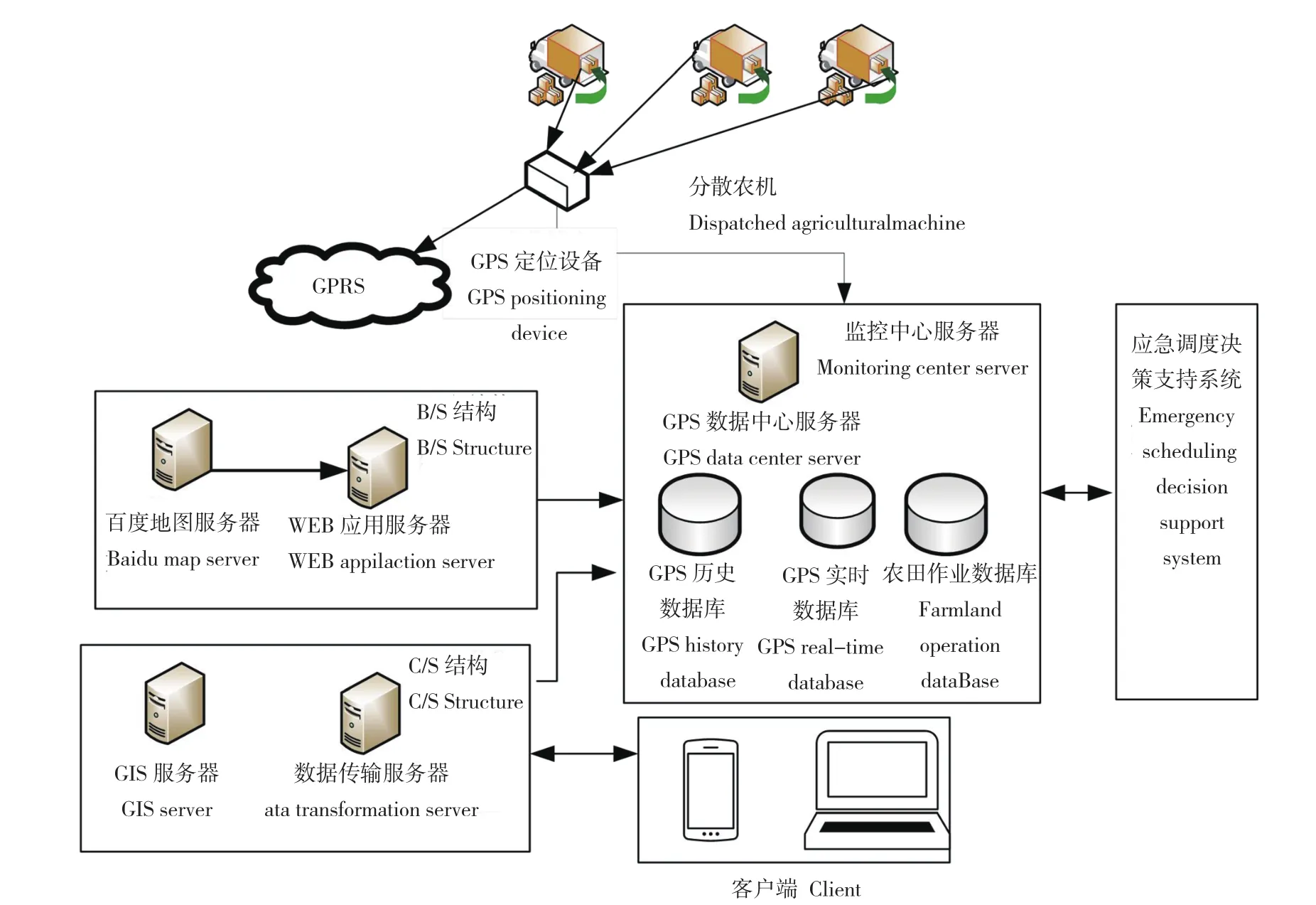
圖2 基于物聯網的農機監控平臺網絡拓撲圖Fig.2 Network topology diagram of agricultural machinery monitoring platform based on Internet of Things
1.2 基于最短路徑的應急調度算法
本研究選取農機調度的規則是路徑最短,所謂路徑最短是指從當前每臺可用農機到每塊待作業農田間的實際距離中最短的一個稱為最短路徑。實際距離是根據農機和農田經緯度信息調用高德地圖接口計算得到的距離。假定空閑農機的位置用Vm表示,農田作業點用Vf表示。假定在某個區域內,存在G=(V, D),V=(Vm, Vf)。其中,D表示農機點與農田作業點之間的連線,C表示單位時間農機的調度成本。其以最小化總成本為調度目標,建立調度模型如下:

該算法的核心是基于最短路徑原則搜索距離最短的一對農機和農田,進行調度分配直到所有農田均被完成,或所有農機被分配完為止,并按式(1)計算調度成本。其算法流程如圖3所示。
1.3 硬件實現
在前述基于物聯網監控平臺及應急調度算法基礎上,開發出一套基于Android的手機客戶端的農機應急調度系統平臺。其主要硬件模塊包括數據采集模塊及GPS定位模塊。
MZH001 GSM/GPRS 數據采集模塊是上海移遠科技公司用于調試應用 GSM/GPRS模塊MC20功能而專門設計一套開發系統。開發板以 STM32單片機微處理器(型號:STM32F103C8T6)為核心,以 MC20 GPRS 模塊為通訊渠道,并引出了STM32 單片機的大部分IO口資源[21]。其系統框圖見圖4。
GPS模塊選用的MC20是一款超小尺寸GSM/GPRS0+GNSS 模塊。本設計采用GPS有源天線的設計方法,更加適合客戶進行使用。模塊在有GPRS 網絡情況下,支持AGPS 輔助功能,加速GPS 定位。MZH001內嵌TCP/UDP/HTTP/FTP/PPP協議,支持數據透明傳輸,使無線終端與服務器之間的數據傳輸變得極其簡單。
2 結果與分析
2.1 基于JAVA的軟件界面
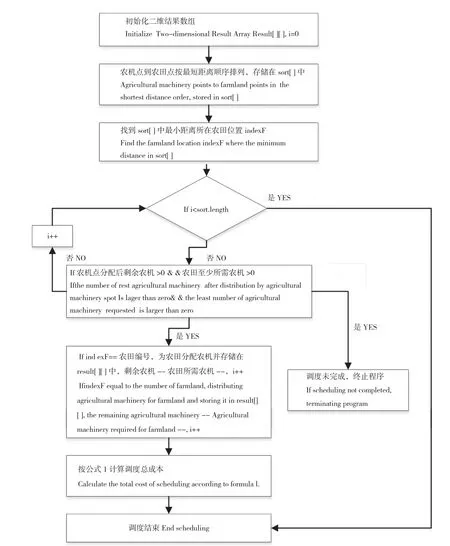
圖3 基于最短路徑的農機應急調度算法流程Fig.3 Flowchart for agricultural machinery emergency scheduling algorithm based on shortest path
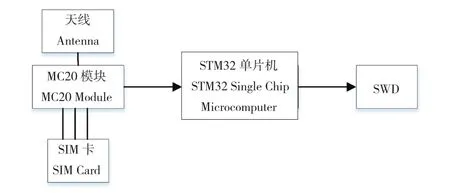
圖4 數據采集模塊系統框Fig.4 Data acquisition module system block diagram
根據農機上安裝的基于stm32單片機GPS模塊定位系統進行定位功能,應用JAVA語言調用百度地圖開源的Android 版地圖API,開發了基于Andriod的農機主及農田主客戶端程序。需要查詢農機位置時,首先打開監控開關,然后點擊右上方的汽車按鈕選擇農機,農機的位置就會顯示在地圖中(圖5)。該定位系統將位置信息通過GPRS傳送到服務器寫入數據庫,地圖界面將根據農機數據庫信息顯示農機的位置。圖中帶箭頭小圓點為當前位置,小雨滴形狀標記為附近農機位置,該功能能提供實時連續的車輛位置信息。
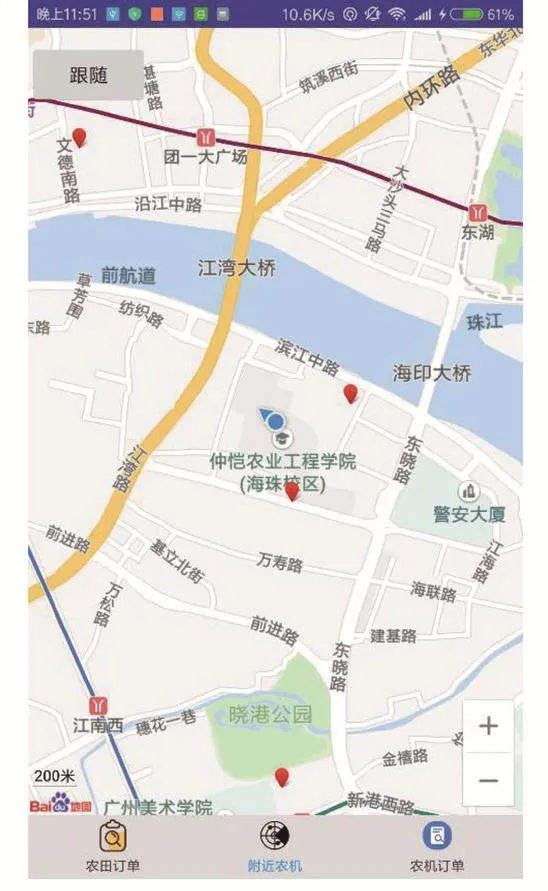
圖5 實時顯示的農機位置Fig.5 Real-time display of agricultural machinery location
在定位功能基礎上,調度決策系統做出最佳決策,在地圖上提供路徑引導是幫助用戶沿預定路線行駛,從而順利到達目的地的過程,其根據地圖數據庫中的道路信息和由定位模塊及地圖匹配模塊提供的當前農機位置產生最佳導航路線(圖6)。
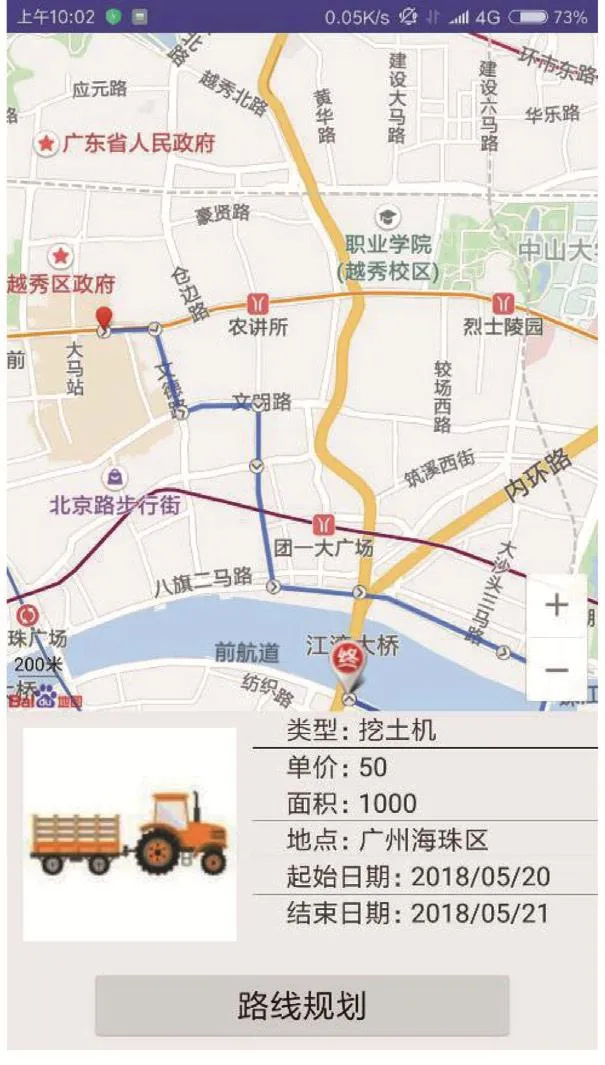
圖6 調度結果及路徑Fig.6 Scheduling results and path planning
2.2 系統測試應用分析
本研究選取10個分布在廣州市不同區域的農田地塊及11臺不同類型分布在廣州市內外的不同農機來進行模擬實驗。通過GPS能夠實時檢查農機的位置,同時通過農田主導入的農田信息獲取農田位置。其運行時間實驗數據及調度成本數據分別為圖7、圖8所示。根據圖7和圖8的數據,分別計算其平均運行時間與平均調度成本,得出最短路徑應急調度法的平均調度時間為0.946 s,平均調度成本為1 238.9元。文獻[22]中基于啟發式搜索的調度算法,其平均運行時間為0.946 s,平均調度成本為1 562.1元。
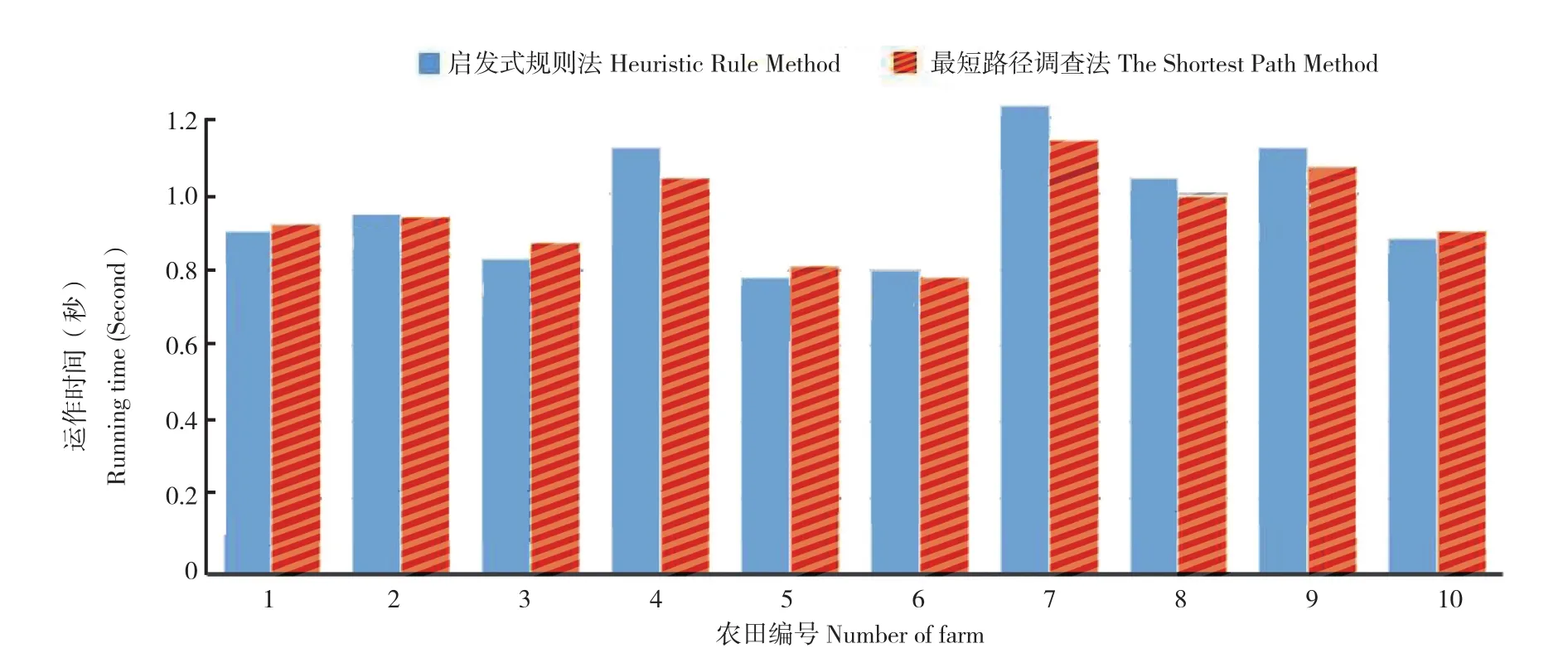
圖7 兩種方法運行時間數據Fig.7 Running time data of two methods
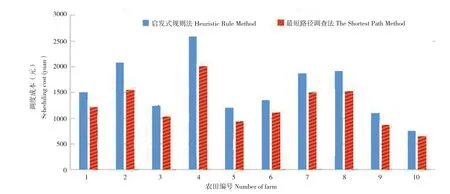
圖8 兩種方法調度成本數據Fig.8 Scheduling cost data of two methods
3 討論
從以上分析可以看出,基于最短路徑法與基于啟發式規則的應急調度方法兩者在平均運行時間上幾乎相同,平均運行時間減少率僅為1.624%。在平均調度成本上,基于最短路徑法的平均調度成本減少26.08%,可以有效降低調度成本。該方法考慮的是點到點之間的最短路徑,并沒有考慮其時間窗的問題。
本研究僅考慮一次分配情況。按照該方法,農機在分配完成后,可能導致由于農機數少于所需的農田數,有的農田第一次并沒有分配到農機,而實際上參與分配的農田地塊較小,農機在完成作業后還可以繼續在未分配完成的農田工作。
4 結論
(1)基于物聯網構建了農機應急調度決策支持系統,通過GPS對農機進行定位,通過GPRS對農機的位置及其他傳感器信息進行信息傳輸。
(2)建立基于最短路徑的調度模型,并選取10個樣本進行實驗分析, 經過與基于啟發式模型方法進行性能比較,得出其在平均調度成本上比其減少26%,但是兩者的平均調度時間幾乎相同,接近1 s。
(3)應用JAVA技術開發了基于Android系統的手機客戶端APP,實現農機的跨區調度、農機農田相關數據庫的建立、使農業的機械化和產業化將成為必然。其建立對引導農機作業向自動化、智能化、信息化發展具有非常重要的現實意義。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中華手工(2017年2期)2017-06-06 23:00:31
故事大王(2016年7期)2016-09-22 17:30:08
中外會展(2014年4期)2014-11-27 07:46:46
兒童故事畫報(2013年3期)2013-06-24 05:40:30
小哥白尼·軍事科學畫報(2009年9期)2009-09-14 03:18:56
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
