純電動汽車驅動系統選型及仿真研究
2019-08-15 02:00:46張志強翟克寧韋杰宏覃胤和
裝備制造技術 2019年6期
張志強,翟克寧,李 強,韋杰宏,黃 真,覃胤和
(東風柳州汽車有限公司,廣西 柳州545005)
1 概述
純電動汽車憑借著零排放和低使用成本等優勢,已經成為廣受市場青睞和高速發展的汽車產品。從2008年至今,我國純電動汽車年車型數量從不足10款,增長至超過1500款[1];我國純電動汽車年銷量從不足500輛,至今已經突破80萬輛。同時伴隨自動駕駛和共享移動出行服務等增值功能及產業發展,全球純電動汽車年銷量預計在2040年將超過3000 萬輛[2]。
驅動系統作為純電動汽車的核心“三大電”之一,驅動系統的效率等對純電動汽車動力性能及純電續航里程有著至關重要的影響,擴大驅動系統效率大于90%的工作區域等研發工作逐漸成為了純電動汽車技術攻關的重點[3]。
為此本文首先結合某款純電動汽車的關鍵性能指標要求,對驅動系統做初步選型計算;然后搭建純電動汽車仿真平臺,結合兩個驅動系統方案,開展純電動汽車動力性和純電續航里程等關鍵性能仿真計算;最后提出基于NEDC工況需求的驅動系統效率評價方法,對比分析該兩個方案的優劣勢,闡明驅動系統對純電續航里程性能的影響。
2 純電動汽車驅動系統選型計算
某款純電動汽車基礎參數和關鍵性能指標如表1所示。為了滿足該電動汽車的動力性能需求,驅動系統的選型必須綜合考慮以下三個動力性需求:最高車速需求的功率、最大爬坡度需求的功率和百公里加速時間需求的功率。

表1 某純電動汽車基礎參數和關鍵性能指標
(1)最高車速需求的功率
最高車速需求的功率計算如下[4]:

其中:m為汽車質量;g為重力加速度;f為汽車滾動阻力系數;vmax為最高車速;CD為風阻系數;A為迎風面積;ηT為傳動效率。
(2)最大爬坡度需求的功率
最大爬坡度需求的功率計算如下[5]:

其中:α為爬坡度;va為坡道車速。
(3)百公里加速時間需求的功率
百公里加速時間需求的功率計算如下:

其中:t為0~100 km/h加速時間;δ為汽車旋轉質量換算系數;va為最終加速后的車速。
為同時滿足最高車速、最大爬坡度和百公里加速時間等動力性需求,驅動系統功率需大于P1、P2和P3中的最大值,即驅動系統功率需大于69 kW。
3 純電動汽車仿真平臺
為進一步評估驅動系統對純電動汽車相關性能指標的達成情況,本文首先搭建了純電動汽車仿真平臺,如圖1所示,按照純電動汽車驅動結構方式,將純電動汽車基礎參數輸入到相應仿真模塊中。

圖1 純電動汽車仿真平臺
結合驅動系統功率大于69 kW需求,本文初選了兩個驅動系統方案,其外特性對比如圖2所示。

圖2 方案1和2驅動系統外特性曲線
方案1峰值扭矩達170 N·m,峰值功率為70 kW。該方案的萬有特性,即系統效率分布如圖3所示,該方案效率大于90%的工作區域為轉速區間3 000 r/min~11 000 r/min,扭矩區間為6 N·m ~160 N·m。

圖3 方案1驅動系統萬有特性
方案2峰值扭矩達270 N·m,峰值功率為120 kW。該方案的系統萬有特性,即系統效率分布如圖4所示,該方案效率大于90%的工作區域為轉速區間3 000 r/min~ 14 000 r/min,扭矩區間為9 N·m~ 207 N·m。

圖4 方案2驅動系統萬有特性
4 仿真結果分析
方案1和方案2對應的純電動汽車關鍵性能仿真結果如表2所示。方案1和方案2均達成純電動汽車動力性和純電續航里程目標。受限于方案1的功率和扭矩比方案2小,方案1的動力性比方案2略差。

表2 方案1和2仿真性能匯總
從圖3和圖4對比可知方案1和方案2的效率特性是不相同的,方案1中效率大于90%的區域更為寬廣。但是單憑該區域的大小并無法量化評估哪個方案下的純電續航里程的性能更優。為此本文提出基于工況需求的驅動系統效率評價方法,具體如下:1、首先針對續航里程工況(NEDC),對仿真過程中驅動系統工作的轉速和扭矩進行歸類統計,將高頻出現的工況進行匯總;2、將高頻工況對應驅動系統效率進行統計,如驅動系統效率大于90%的工況占比越多,則說明該驅動系統在NEDC工況下工作表現越優,純電續航里程越長。
表3和表4分別給出了方案1和方案2在NEDC工況下,驅動系統的高頻工況點匯總。這10個高頻工況點出現的時間總和占整個NEDC工況時間的92%以上,這說明該10個高頻工況下驅動系統的效率表現是能夠反映其在NEDC工況下的性能表現。

表3 方案1高頻工況匯總
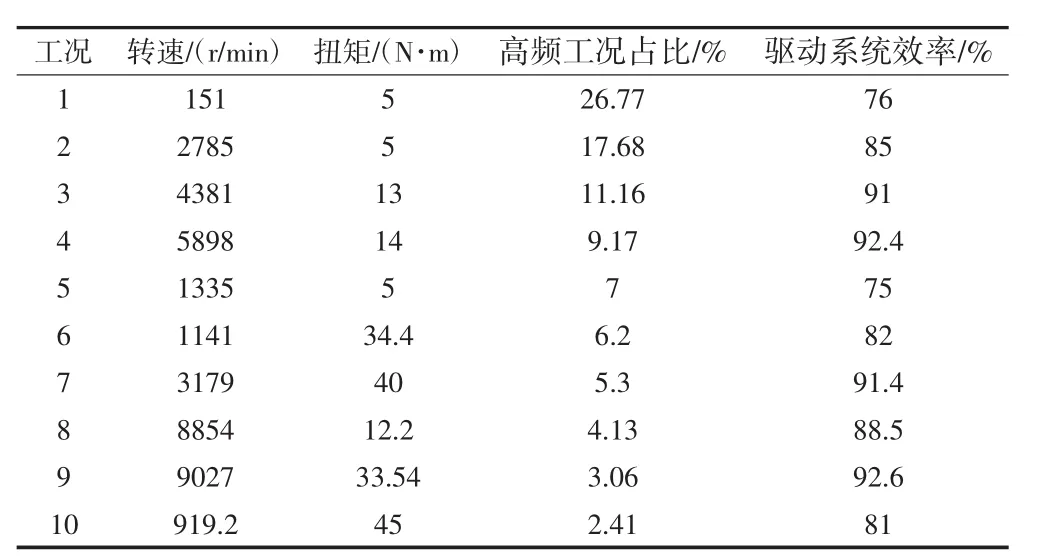
表4 方案2高頻工況匯總
將方案1和方案2的高頻工況點繪制到萬有特性圖中,分別如圖5和圖6所示。圖中圈的大小表征對應工況占比,圈的中心表征對應工況轉速和扭矩。從高頻工況點的分布可知,方案1的高頻工況比方案2更多的分布在驅動系統效率較高的區域。

圖5 方案1驅動系統高頻工況點

圖6 方案2驅動系統高頻工況點
為進一步量化這兩個方案的效率表現,將驅動系統效率大于80%、90%和93%的工況占比進行匯總統計,如表5所示。方案1的效率大于80%、90%和93%的工況占比方案2要更大,這也能夠量化說明在NEDC工況下,方案1的驅動系統工作效率比方案更優,這也是方案1的純電續航里程性能比方案2更優的原因。

表5 不同效率下的高頻工況占比匯總
5 結論
(1)純電動汽車驅動系統選型必需同時滿足最高車速、最大爬坡度和百公里加速時間等動力性能及功率要求。
(2)基于工況需求的驅動系統效率評價方法,可以有效地評估驅動系統對純電續航里程性能的影響。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
甘肅教育(2020年14期)2020-09-11 07:57:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
商周刊(2017年9期)2017-08-22 02:57:49
時代英語·高二(2015年1期)2015-03-16 00:08:11
