鍋爐水循環(huán)系統(tǒng)的無模型自適應(yīng)控制研究
2019-08-17 07:40:02朱明山劉劍敏胡小虎徐順寵葉志暉
朱明山,劉劍敏,胡小虎,余 數(shù),徐順寵,葉志暉
(浙江中煙工業(yè)有限責(zé)任公司 寧波卷煙廠, 浙江 寧波 315504)
如何提高鍋爐熱效率是動(dòng)力供應(yīng)部門需要面對(duì)的重要問題。目前,鍋爐余熱回收控制系統(tǒng)在PID控制算法基礎(chǔ)上有所發(fā)展。李素真等[1]采用監(jiān)督預(yù)測(cè)控制算法對(duì)余熱鍋爐建立燃料量對(duì)主蒸汽壓力的控制模型,實(shí)現(xiàn)了階梯式控制策略,提高了控制速度。付一鳴等[2]采用線性擴(kuò)張觀測(cè)器對(duì)余熱鍋爐水位二階化系統(tǒng)總擾動(dòng)進(jìn)行實(shí)時(shí)估計(jì)與補(bǔ)償,設(shè)計(jì)了具有串級(jí)形式的自抗擾控制器,實(shí)現(xiàn)了水位誤差快速收斂。顧蓉等[3]在PID反饋控制的基礎(chǔ)上加入自適應(yīng)變參數(shù)的前饋控制,用于控制干熄焦余熱鍋爐的主蒸汽溫度,取得了較好的效果。王曉明等[4]提出了帶擾動(dòng)補(bǔ)償控制的無模型自適應(yīng)控制算法,將其應(yīng)用于鍋爐汽包水位控制系統(tǒng),克服了汽包水位系統(tǒng)中蒸汽流量的外在擾動(dòng),實(shí)現(xiàn)了無靜差控制。無模型自適應(yīng)控制(MFAC)算法[5]是一種典型的數(shù)據(jù)驅(qū)動(dòng)控制算法,利用被控系統(tǒng)的輸入輸出數(shù)據(jù)設(shè)計(jì)出性能穩(wěn)定的控制器。MFAC由于其高效的控制性能被應(yīng)用于許多領(lǐng)域。文獻(xiàn)[6]提出了一種新穎的無模型自適應(yīng)控制算法,用于多輸入多輸出非線性的離散系統(tǒng)控制。為提高高速無刷直流電機(jī)系統(tǒng)的可靠性、降低功耗,文獻(xiàn)[7]給出了一種基于無模型自適應(yīng)控制(MFAC)的無位置傳感器的驅(qū)動(dòng)器,能夠在整個(gè)運(yùn)行速度范圍內(nèi)獲得理想的整流效果。文獻(xiàn)[8]將滑模控制和無模型自適應(yīng)控制相結(jié)合用于離散非線性過程控制中,確保了跟蹤誤差的快速收斂性。文獻(xiàn)[9]引入非周期神經(jīng)網(wǎng)絡(luò)權(quán)值更新法估計(jì)無模型自適應(yīng)控制器參數(shù),應(yīng)用于非線性離散系統(tǒng)的事件觸發(fā)數(shù)據(jù)驅(qū)動(dòng)控制問題。文獻(xiàn)[10]將神經(jīng)網(wǎng)絡(luò)模型辨識(shí)和無模型自適應(yīng)控制相結(jié)合應(yīng)用于碳捕獲過程控制中,有效地將排放源產(chǎn)生的二氧化碳收集起來。但是該控制算法有4個(gè)參數(shù)需要人工設(shè)定,這會(huì)影響控制算法的性能。針對(duì)以上情況,很多國內(nèi)學(xué)者對(duì)其參數(shù)進(jìn)行了優(yōu)化。黃偉[11]采用改進(jìn)的人工魚群算法對(duì)無模型自適應(yīng)控制算法進(jìn)行參數(shù)優(yōu)化。楊延西[12]利用量子粒子群優(yōu)化對(duì)無模型自適應(yīng)控制算法控制參數(shù)尋優(yōu),確定了控制參數(shù)。費(fèi)盛[13]通過遺傳算法對(duì)無模型自適應(yīng)控制算法進(jìn)行參數(shù)優(yōu)化。馮增喜[14]采用單純形法實(shí)現(xiàn)了MFAC參數(shù)尋優(yōu)設(shè)計(jì)。然而,這些優(yōu)化算法過于復(fù)雜,需要進(jìn)行大量的額外運(yùn)行,不適合在控制系統(tǒng)中應(yīng)用。模式搜索法優(yōu)化具有簡(jiǎn)單、快速收斂的優(yōu)點(diǎn),鑒于此,本文采用模式搜索法優(yōu)化無模型自適應(yīng)控制算法的4個(gè)參數(shù),使其控制性能達(dá)到最優(yōu),然后用于鍋爐余熱控制系統(tǒng)中,以求最大限度地利用燃料熱量提高鍋爐熱效率。
1 問題分析
吸收鍋爐尾部煙氣的熱量是提高鍋爐熱效率的有效措施,其主要過程是在鍋爐排煙線路上安裝煙氣熱交換器,采用低溫軟水去吸收煙氣換熱器的多余熱量后流入到保溫水箱,回收的熱水可再次用作鍋爐補(bǔ)水,既提高了鍋爐的補(bǔ)水溫度,又降低了排煙溫度,實(shí)現(xiàn)了提高鍋爐熱效率、降低產(chǎn)品生產(chǎn)成本和節(jié)能環(huán)保的目的。換熱器的軟水流動(dòng)性直接影響熱交換的效率,阻礙軟水流動(dòng)性的原因在于:軟水從鍋爐軟水箱進(jìn)入換熱器被加熱,再到保溫水箱,當(dāng)保溫水箱液位到達(dá)設(shè)定值時(shí),為避免保溫水箱中軟水溢出,軟水供應(yīng)會(huì)停止,從而導(dǎo)致?lián)Q熱器中無軟水流動(dòng),使部分軟水在換熱器中滯留,被過度加熱而引發(fā)安全隱患,且不能充分吸收尾部煙氣熱量。
為進(jìn)一步提高鍋爐給水溫度,降低排煙溫度,提高鍋爐熱效率,節(jié)省企業(yè)生產(chǎn)成本,根據(jù)設(shè)定的目標(biāo)對(duì)鍋爐給水系統(tǒng)及尾部煙氣余熱回收系統(tǒng)進(jìn)行方案優(yōu)化,對(duì)可能的方案進(jìn)行研究論證,并最終對(duì)鍋爐水循環(huán)系統(tǒng)進(jìn)行改造安裝。
改造后的鍋爐水循環(huán)系統(tǒng)如圖1所示。為充分吸收鍋爐尾部煙氣的熱量,用鍋爐軟水箱到保溫水箱的低溫軟水去吸收這部分熱量。軟水從鍋爐軟水箱進(jìn)入換熱器被加熱,再到保溫水箱,當(dāng)保溫水箱液位到達(dá)設(shè)定值時(shí),為避免保溫水箱中軟水溢出,軟水供應(yīng)會(huì)停止,從而導(dǎo)致?lián)Q熱器中無軟水流動(dòng),使部分軟水在換熱器中滯留被過度加熱而引發(fā)安全隱患,也影響尾部煙氣熱量的充分吸收。因此,在保溫水箱進(jìn)口處設(shè)電動(dòng)三通閥,利用保溫水箱液位通過PID控制軟水送回軟水箱的流量,及時(shí)調(diào)整保溫水箱進(jìn)水調(diào)節(jié)閥開度,以保證軟水的流動(dòng)性和煙氣熱量的充分吸收。
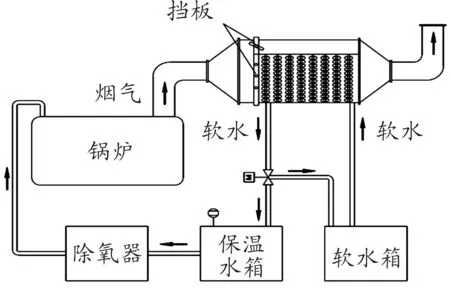
圖1 改造后的鍋爐水循環(huán)系統(tǒng)
目前,保溫水箱的進(jìn)水調(diào)節(jié)閥采用PID控制算法。受系統(tǒng)時(shí)滯和非線性等因素影響,常規(guī)PID控制器進(jìn)行保溫水箱進(jìn)水閥調(diào)節(jié)時(shí)容易出現(xiàn)初期流量超調(diào)和后期控制精度低等問題。為了進(jìn)一步實(shí)現(xiàn)精確控制,本文建立了一種基于模式搜索優(yōu)化的無模型自適應(yīng)控制方式,提高了保溫水箱進(jìn)水閥的控制能力,提升了鍋爐余熱利用率。
2 設(shè)計(jì)方法
2.1 系統(tǒng)辨識(shí)
本文的鍋爐水循環(huán)系統(tǒng)是一個(gè)單輸入單輸出非線性系統(tǒng),輸入量是保溫水箱的液位,輸出量是進(jìn)水調(diào)節(jié)閥開度,輸入量和輸出量之間有如下關(guān)系:
y(k)=f(y(k-1),…,y(k-ny),
u(k-1),…,u(k-nu))
(1)
在控制之前,需要對(duì)保溫水箱的液位和進(jìn)水閥開度數(shù)據(jù)進(jìn)行系統(tǒng)辨識(shí),以得到被控對(duì)象的模型。
由于保溫水箱的液位和進(jìn)水閥開度是工藝過程數(shù)據(jù),產(chǎn)生的數(shù)據(jù)量比較大,而且需要快速得到輸入輸出之間的關(guān)系,因此本文采用收斂較快的批量最小二乘法進(jìn)行系統(tǒng)參數(shù)辨識(shí)。
將式(1)寫成如下最小二乘形式:
y(k)=-a1y(k-1)-…-anay(k-na)+
b1u(k-1)+…+bnbu(k-nb)+ξ(k)=
φT(k)θ+ξ(k)
(2)
式中:φ(k)為數(shù)據(jù)矢量;θ為待估計(jì)參數(shù)矢量,即
φ(k)=[-y(k-1),…,-y(k-na),
u(k-1),…,u(k-nb)]T
θ=[a1,…,ana,b1,…,bnb]T

(3)
式中:Y=[y(1),y(2),…,y(M)]T∈RM×1;Φ=[φT(1),φT(2),…,φT(M)]T∈RM×(na+nb+1)。
2.2 無模型自適應(yīng)控制
對(duì)于保溫水箱的液位和進(jìn)水閥開度模型,本文采用無模型自適應(yīng)控制的緊格式動(dòng)態(tài)線性化方法(CFDL)進(jìn)行控制。該模型關(guān)于控制輸入u(k)的偏導(dǎo)數(shù)是連續(xù)的,因此式(2)可以等價(jià)表示為如下CFDL模型:
y(k+1)=y(k)+Δy(k+1)=
y(k)+φ(k)Δu(k)
(4)
式中:Δy(k+1)=y(k+1)-y(k);φ(k)為偽偏導(dǎo)數(shù)。
接著,定義一個(gè)控制性能指標(biāo)函數(shù):
J(u(k))=[yr(k+1)-y(k+1)]2+
λ[u(k)-u(k-1)]2
(5)
式中:yr(k+1)為期望輸出信號(hào);λ>0為權(quán)重因子。
將式(4)代入式(5),得到新的指標(biāo)函數(shù):
J(u(k))=[yr(k+1)-y(k)-
φ(k)(u(k)-u(k-1))]2+
λ[u(k)-u(k-1)]2
(6)
可見,u(k)影響了指標(biāo)函數(shù)J(u(k))的性能。為了得到最佳的u(k),用J(u(k))對(duì)u(k)求導(dǎo):
2(λ+φ(k)2)(u(k)-u(k-1))
(7)
為了得到最優(yōu)的控制律,即求取上式的極值,令式(7)值為零:
-2φ(k)(yr(k+1)-y(k))+
2(λ+φ(k)2)(u(k)-u(k-1))=0
得到如下控制律:
(8)
為了使控制律更具有泛化性,另外加入?yún)?shù)ρ>0來調(diào)節(jié)控制律,則新的控制律變?yōu)?/p>

(9)
由于偽偏導(dǎo)數(shù)φ(k)一般是時(shí)變的,因此需要重新估計(jì)φ(k)的值。設(shè)計(jì)一個(gè)關(guān)于φ(k)的估計(jì)準(zhǔn)則函數(shù):
(10)


(11)

(12)
(13)
2.3 模式搜索優(yōu)化算法
模式搜索算法是一種不依賴于導(dǎo)數(shù)的直接搜索算法,可求解不可微分或不連續(xù)的最優(yōu)化問題,且計(jì)算速度較快,符合控制速度的要求。模式搜索算法主要由探測(cè)移動(dòng)和模式移動(dòng)兩種移動(dòng)過程組成。探測(cè)移動(dòng)主要探測(cè)使得目標(biāo)函數(shù)下降的坐標(biāo)位置,因此沿著坐標(biāo)軸移動(dòng);模式移動(dòng)用于找到兩個(gè)相鄰探測(cè)點(diǎn)之間的最優(yōu)值,因此沿著兩個(gè)相鄰的探測(cè)點(diǎn)連線的方向移動(dòng),兩種移動(dòng)方式交替進(jìn)行。模式搜索算法原本用于多維無約束優(yōu)化問題,由于需要優(yōu)化的4個(gè)參數(shù)都是正數(shù),因此只需要修改搜索算法,使其在正數(shù)范圍內(nèi)搜索。下面是改進(jìn)的優(yōu)化模式搜索算法計(jì)算步驟:

步驟2令y=xk。
步驟3從y出發(fā),依次作平行于單位矢量ej(j=1,2,3,4)的軸向探測(cè)移動(dòng)。
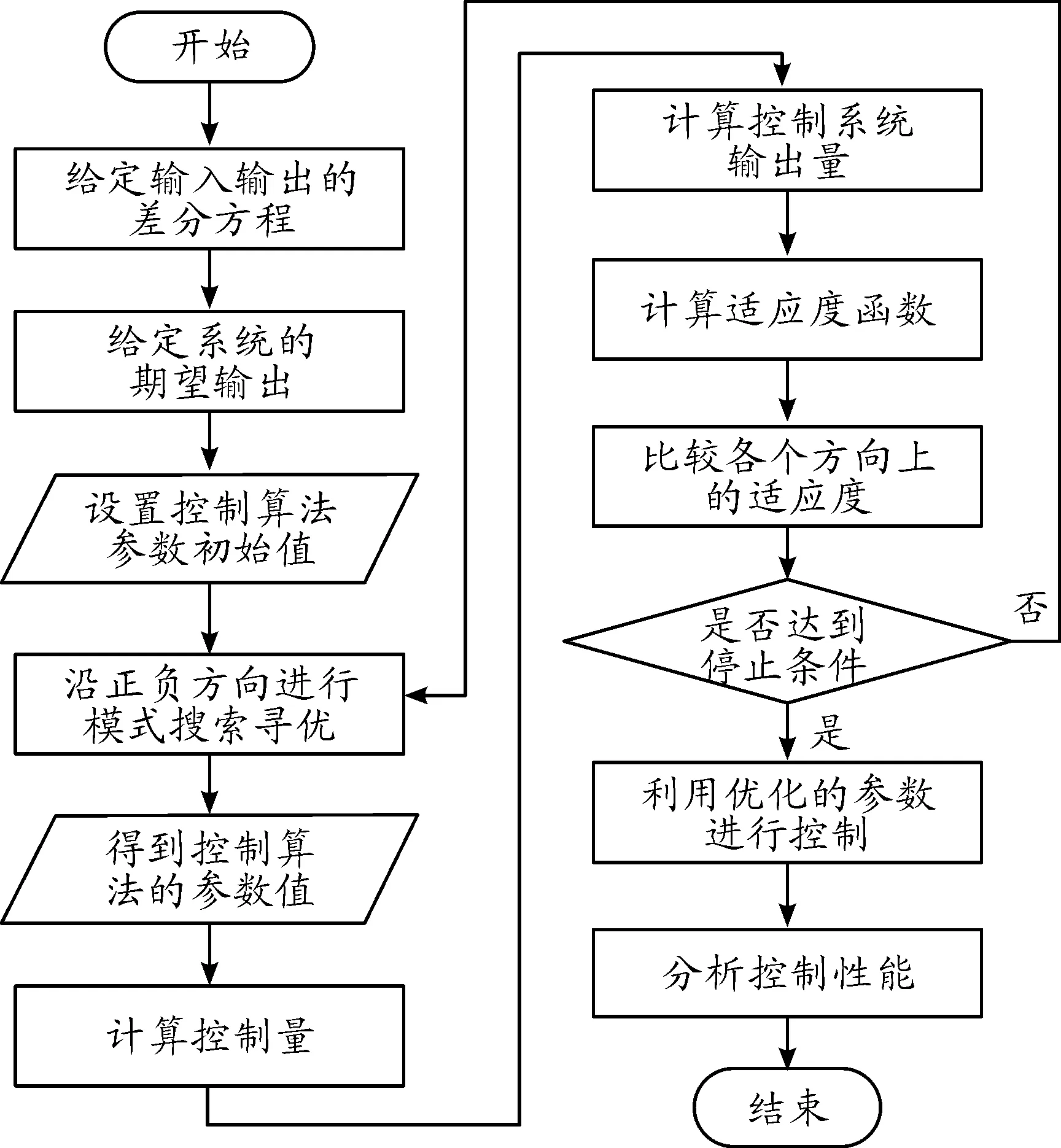
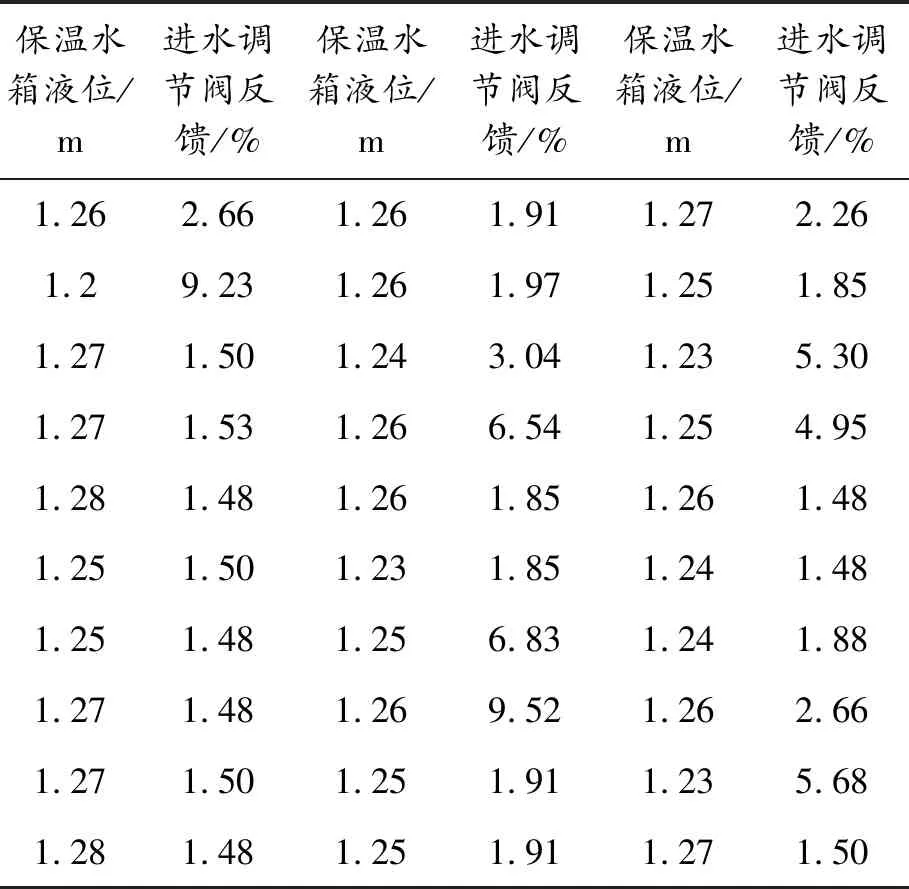
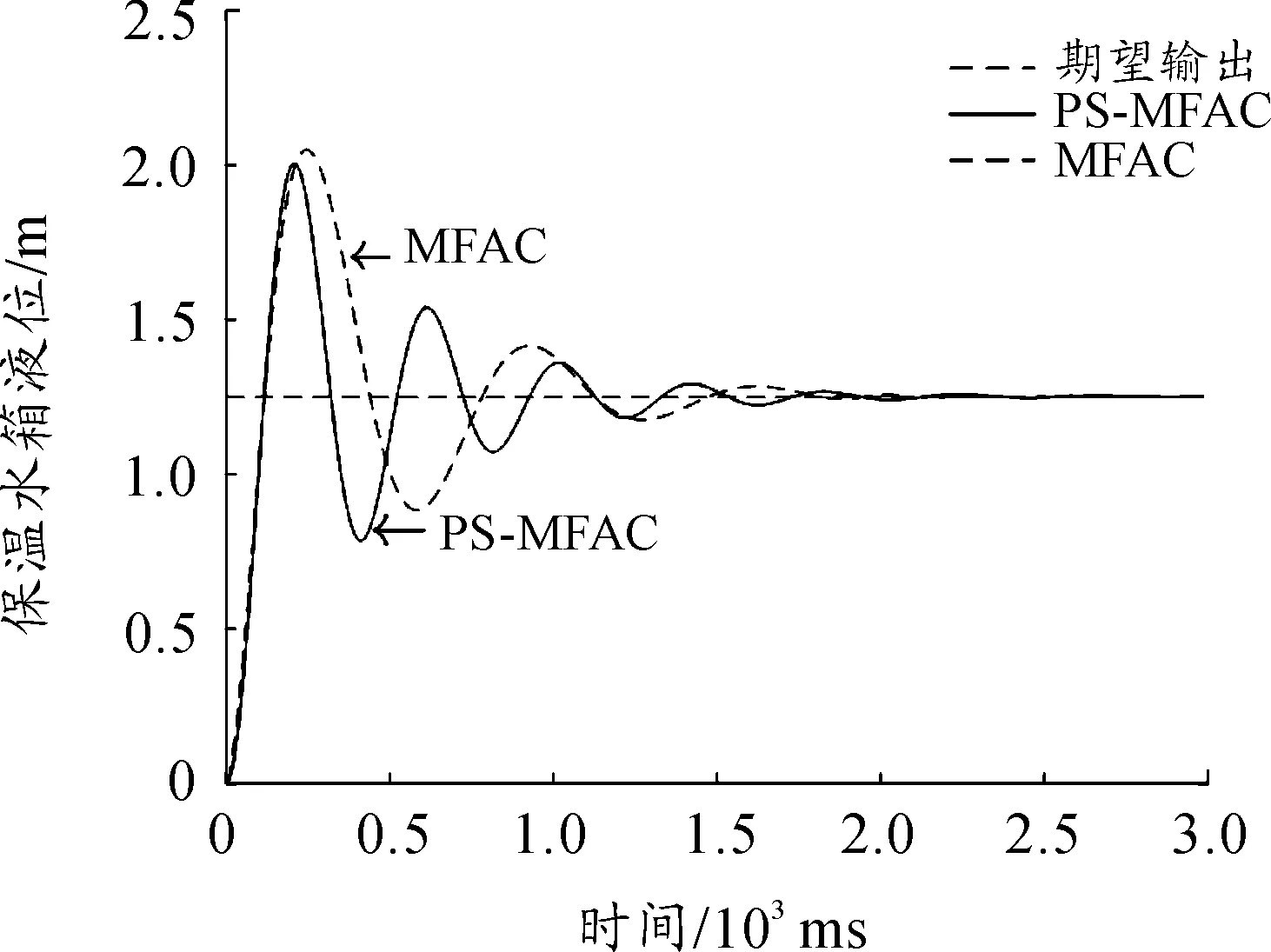
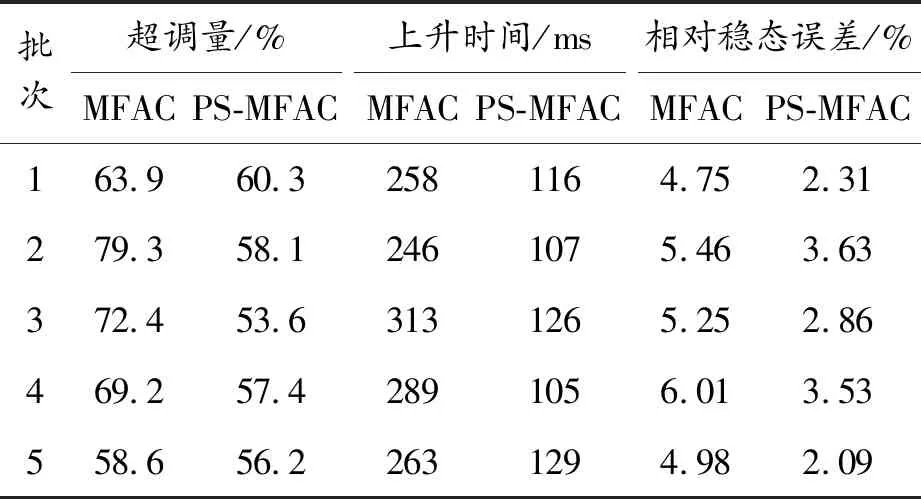
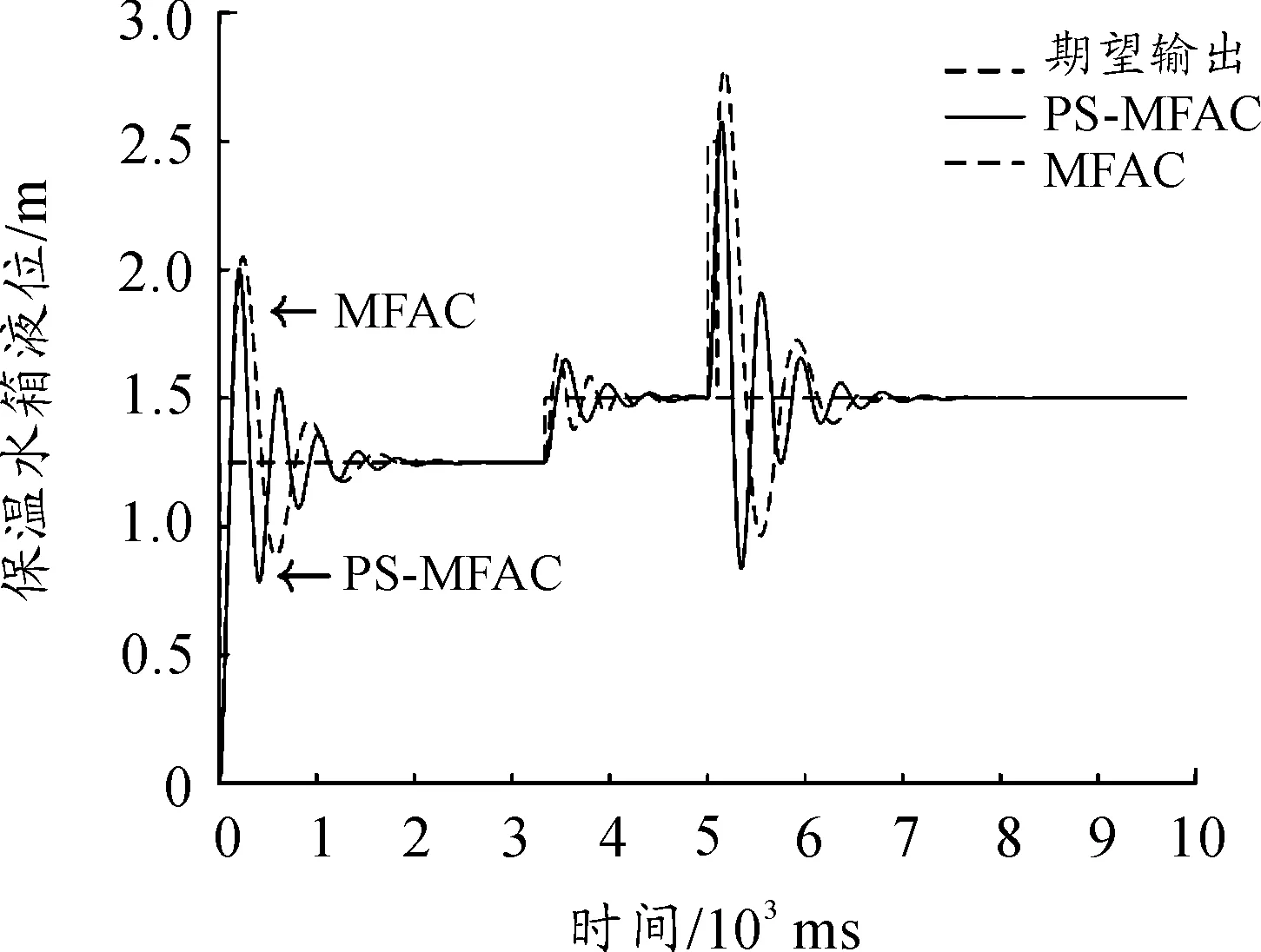
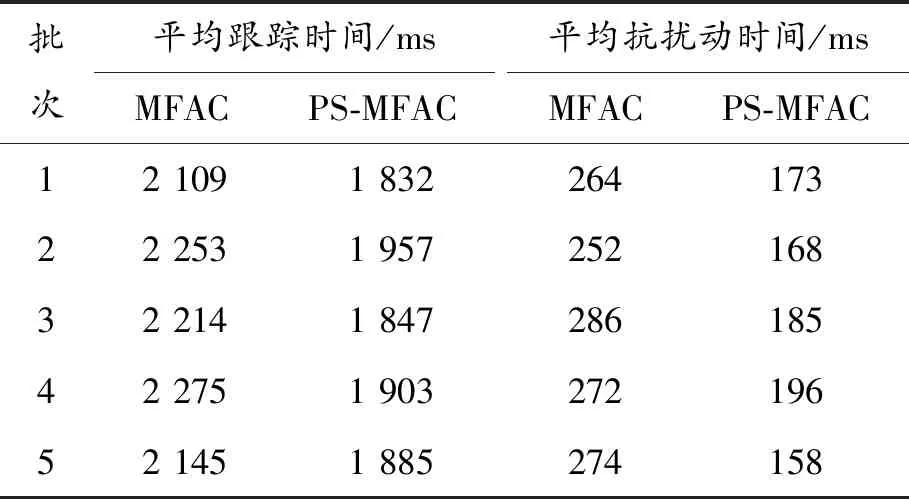
步驟4令xk+1=y,若f(xk+1) 步驟5若|δk|<ε或者k=iter,則停止迭代,輸出xk;否則當(dāng)xk+1≠xk時(shí),令y=xk+1,δk+1=δk,k=k+1,轉(zhuǎn)至步驟3,當(dāng)xk+1=xk時(shí),令y=xk+1δk+1=θδk,k=k+1,轉(zhuǎn)至步驟3。 為了尋找MFAC算法的最優(yōu)參數(shù),需設(shè)計(jì)一個(gè)適應(yīng)度函數(shù)。該適應(yīng)度函數(shù)應(yīng)主要考慮控制誤差,其次應(yīng)限制系統(tǒng)輸入和輸出的波動(dòng)幅度,以避免在控制過程中出現(xiàn)過度震蕩。因此,本文設(shè)計(jì)了如式(14)的適應(yīng)度函數(shù)。 F(ρ,λ,η,μ)=(yr(k+1)-y(k+1))2+ (u(k)-u(k-1))2+(y(k)-y(k-1))2 (14) 把模式搜索優(yōu)化和無模型自適應(yīng)控制相結(jié)合,整體尋優(yōu)流程如圖2所示。由于模式搜索優(yōu)化算法從初始值出發(fā)自動(dòng)搜索尋優(yōu),因此一旦設(shè)置了MFAC的初始參數(shù),在迭代過程中就不需要再設(shè)置初始值,這也是模式搜索算法的優(yōu)點(diǎn)之一。 圖2 模式搜索尋優(yōu)流程 采用OPC客戶端軟件對(duì)工藝數(shù)據(jù)進(jìn)行實(shí)時(shí)采集,每1 s采集1次鍋爐保溫水箱的液位和進(jìn)水調(diào)節(jié)閥反饋量,共收集5個(gè)批次數(shù)據(jù),部分?jǐn)?shù)據(jù)如表1所示。 表1 保溫水箱部分時(shí)段的工藝參數(shù) 首先,利用上述數(shù)據(jù)進(jìn)行系統(tǒng)辨識(shí),辨識(shí)算法即最小二乘法。取滯后時(shí)間為2 s,即na=2,nb=2,得到如式(15)所示的保溫水箱的液位和進(jìn)水閥開度輸入輸出模型: y(k)=-0.603 2y(k-1)-0.390 5y(k-2)+ 0.002 2u(k-1)+0.000 8u(k-2) (15) 為便于比較控制算法性能,考慮到PID算法受參數(shù)整定的影響性能不穩(wěn)定,采用兩種控制算法進(jìn)行比較。兩種控制算法分別是標(biāo)準(zhǔn)的無模型自適應(yīng)控制算法和本文提出的基于模式搜索優(yōu)化的無模型自適應(yīng)控制算法。 模式搜索優(yōu)化的初始化值為:初始點(diǎn)x0={0.14,0.15,0.12,0.13},初始步長δ0={0.1,0.1,0.1,0.1},加速系數(shù)γ=1.4,收縮系數(shù)θ=0.2,精度ε=0.01,最大迭代次數(shù)iter=100。 標(biāo)準(zhǔn)的無模型自適應(yīng)控制算法的4個(gè)參數(shù){η,μ,ρ,λ}值為{0.34,0.65,0.82,0.53}。 3.3.1超調(diào)量 超調(diào)量σ是刻畫響應(yīng)峰值和穩(wěn)態(tài)值之間相對(duì)偏差程度的指標(biāo),σ越小表示系統(tǒng)震蕩越小。 (16) 式中:y(tp)為響應(yīng)峰值;y(∞)響應(yīng)穩(wěn)態(tài)值。 3.3.2上升時(shí)間 上升時(shí)間τ是指響應(yīng)曲線從穩(wěn)態(tài)值的10%上升到90%所用的時(shí)間,τ越小表示響應(yīng)速度越快。 3.3.3相對(duì)穩(wěn)態(tài)誤差 相對(duì)穩(wěn)態(tài)誤差e是響應(yīng)曲線最終趨于穩(wěn)定時(shí)系統(tǒng)響應(yīng)和系統(tǒng)期望之間的相對(duì)偏差,e越小說明系統(tǒng)越穩(wěn)定。 (17) 式中:yr為期望輸出;y(∞)為響應(yīng)穩(wěn)態(tài)值。 3.3.4平均跟蹤時(shí)間 平均跟蹤時(shí)間T(t1→t2)是系統(tǒng)從一個(gè)穩(wěn)態(tài)過渡到新的穩(wěn)態(tài)所需的時(shí)間總和的平均值。T(t1→t2)越小說明系統(tǒng)切換到新目標(biāo)所需的時(shí)間越少。 3.3.5平均抗擾動(dòng)時(shí)間 平均抗擾動(dòng)時(shí)間T(v)是系統(tǒng)受擾動(dòng)作用重新恢復(fù)平衡所用的時(shí)間總和的平均值。T(v)越小說明系統(tǒng)抗干擾性能越強(qiáng)。 首先分析對(duì)比2種控制算法的靜態(tài)性能指標(biāo):超調(diào)量、上升時(shí)間和相對(duì)穩(wěn)態(tài)誤差。保溫水箱水位設(shè)定為1.25 m,比較2種控制算法的靜態(tài)性能。 圖3 兩種控制算法的響應(yīng)曲線 批次超調(diào)量/%MFACPS-MFAC上升時(shí)間/msMFACPS-MFAC相對(duì)穩(wěn)態(tài)誤差/%MFACPS-MFAC163.960.32581164.752.31279.358.12461075.463.63372.453.63131265.252.86469.257.42891056.013.53558.656.22631294.982.09 從圖3和表2可以看出:采用模式搜索優(yōu)化的無模型自適應(yīng)控制系統(tǒng)的靜態(tài)性能較高,有效地降低了超調(diào)量,縮短了上升時(shí)間,減少了相對(duì)穩(wěn)態(tài)誤差。 接著對(duì)比2種控制算法的動(dòng)態(tài)性能指標(biāo):平均跟蹤時(shí)間和平均抗擾動(dòng)時(shí)間。為了進(jìn)行跟蹤性實(shí)驗(yàn),在3 300 ms時(shí)增加鍋爐燃燒量,提高煙氣溫度,提高保溫水箱的水位設(shè)定值。為了進(jìn)行抗擾動(dòng)性實(shí)驗(yàn),在5 000 ms時(shí),再次加大鍋爐燃燒量,由于煙氣溫度陡然升高,造成保溫水箱水位突然上升,控制系統(tǒng)對(duì)其做出恢復(fù)水位高度的控制處理,使其迅速回到設(shè)定的水位。 圖4 兩種控制算法的響應(yīng)曲線 批次平均跟蹤時(shí)間/msMFACPS-MFAC平均抗擾動(dòng)時(shí)間/msMFACPS-MFAC12 1091 83226417322 2531 95725216832 2141 84728618542 2751 90327219652 1451 885274158 從圖4和表3可以看出,采用模式搜索優(yōu)化的無模型自適應(yīng)控制系統(tǒng)動(dòng)態(tài)性能更優(yōu),有效地降低了平均跟蹤時(shí)間和平均抗擾動(dòng)時(shí)間。 無模型自適應(yīng)控制是一種簡(jiǎn)便而有效的控制策略,但由于其關(guān)鍵參數(shù)多憑經(jīng)驗(yàn)設(shè)定,在某些控制領(lǐng)域性能受到影響。在眾多的優(yōu)化算法中,本文采用模式搜索算法進(jìn)行參數(shù)優(yōu)化,既搜索到了最優(yōu)的參數(shù)值,又滿足了控制系統(tǒng)對(duì)速度的要求。這種優(yōu)化控制策略被應(yīng)用到鍋爐水循環(huán)控制回路中,首先采用批量最小二乘法辨識(shí)出鍋爐水循環(huán)系統(tǒng)中的保溫水箱部分的輸入輸出關(guān)系,然后采用基于模式搜索的無模型自適應(yīng)控制算法通過保溫水箱進(jìn)水閥調(diào)節(jié)保溫水箱的液位,提升了控制系統(tǒng)的靜態(tài)性能和動(dòng)態(tài)性能,保證了鍋爐水循環(huán)系統(tǒng)的高效運(yùn)行,提高了鍋爐余熱的回收效率。2.4 基于模式搜索優(yōu)化的無模型自適應(yīng)控制
3 仿真實(shí)驗(yàn)
3.1 數(shù)據(jù)采集
3.2 控制算法參數(shù)選擇
3.3 控制指標(biāo)選擇
3.4 數(shù)據(jù)分析
4 結(jié)束語
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03