基于MSRCR的水下圖像清晰化算法
2019-08-26 05:04:42孫杰
無線電工程 2019年9期
關(guān)鍵詞:色彩
孫 杰
(中國人民解放軍91550部隊,遼寧 大連116023)
0 引言
作為水下探測的重要手段[1-2],水下測量儀器可以直觀反映真實的水下場景。但是在海洋環(huán)境中,光波的傳輸特性沒有空氣中優(yōu)良,水體對光能量有著較強的吸收作用,同時水體、懸浮顆粒和浮游生物對光線有著極強的散射效應(yīng),極大限制了水下可見光成像的距離和質(zhì)量。由于成像大多位于較深的水下,自然光難以照射,人工光源照明時,光線受到水的吸收衰減,導致光照條件差,成像接收器接收到的目標信號不強,反映在圖像上會產(chǎn)生假細節(jié)。散射效應(yīng)帶來了圖像模糊、信噪比低、對比度差等問題。關(guān)于水下圖像清晰化處理算法的研究,是獲取水下信息的需要,對研究和開發(fā)海洋都具有重要意義。
現(xiàn)有算法主要集中在增強和復原2個方面,圖像增強技術(shù)面向具體問題,針對不同的特征需求采用不同方法來處理。直方圖均衡、直方圖規(guī)定化、限制對比度自適應(yīng)直方圖均衡等算法,能夠通過調(diào)整圖像灰度值范圍,在一定程度上增強水下圖像的對比度。Iqbal等[3]提出了一種基于對比度滑動拉伸算法的水下圖像增強方法。丁偉等[4]和藍國寧等[5]分別采用壓縮感知和小波的方法對水下圖像進行去噪,有還原圖像色彩的角度上分析。Chambah等人提出了一個基于無監(jiān)督式的色彩均衡算法的色彩校正方法[6]。顏色恒常性算法能消除由于場景光照變化產(chǎn)生的圖像偏色現(xiàn)象,基于Retinex理論的圖像增強算法經(jīng)歷了不斷改進和完善[7-9]。包括隨機步行算法、泊松方程算法、同態(tài)濾波算法、單尺度Retinex(SSR)算法[10]、多尺度Retinex(MSR)算法以及帶色彩恢復的多尺度Retinex算法(MSRCR)[11]等。
在圖像復原方面,張赫等[12]提出了基于大氣湍流模型獲取水下圖像退化函數(shù)的方法,完成圖像分割。李慶忠等[13]提出基于水下光照不均勻成像模型的去噪算法,通過去除小波變換后低頻部分的介質(zhì)散射光增強圖像的對比度。本文將He等[14]基于暗原色先驗知識的圖像處理方法進行改進,在圖像細節(jié)增強的基礎(chǔ)上,采用MSRCR算法進一步解決水下圖像色彩失真的問題。實驗證明,該方法能夠有效提高對比度,并且修正色彩失真,達到水下圖像清晰化的效果。
1 MSRCR算法
1.1 Retinex理論
Retinex理論始于20世紀60年代,其基本內(nèi)容是:物體的顏色由其表面反射特性決定,而不是由反射光強度的絕對值決定。物體的色彩不受光照非均勻性的影響,具有一致性。Retinex算法進行圖像增強的關(guān)鍵是從原圖像中有效地計算出亮度圖像,然后通過降低亮度圖像對反射圖像的影響而達到圖像增強的目的。
1.2 單尺度Retinex(SSR)
單尺度Retinex算法是通過對中心/環(huán)繞Retinex(Center/SurroundRetinex)改進提出的。中心/環(huán)繞Retinex算法理論的基本思想:通過對其周圍環(huán)繞像素賦予不同的權(quán)值來估計每一個中心像素的亮度,這些權(quán)值的比例關(guān)系完全由環(huán)繞函數(shù)來確定。Jobson等根據(jù)這一理論提出了單尺度Retinex算法(SSR),該算法基本內(nèi)容如下:
設(shè)圖像為I(x,y),亮度圖像為L(x,y),反射圖像為R(x,y),則有:
I(x,y)=L(x,y)·R(x,y)。
(1)
該算法的目的是從I(x,y)中得到R(x,y),通常假設(shè)亮度圖像平滑,用圖像的低頻部分近似估計,對圖像進行對數(shù)域處理,使得圖像的值更接近人眼對亮度的感知能力,則單尺度Retinex可以表示為:
ln[I(x,y)*G(x,y)],
(2)
式中,G(x,y)為低通卷積函數(shù),用來估算亮度圖,然后通過從原圖像中去除亮度圖像,即光源亮度的影響,從而恢復物體的本來顏色。Jobson論證了使用高斯卷積函數(shù)可以對原圖像提供更局部的處理,從而更好的增強圖像,因此G(x,y)通常是高斯函數(shù),表達式為:
(3)
式中,λ是常量矩陣,它使得
?G(x,y)dxdy=1,
(4)
式中,c是尺度常量,其值越小,動態(tài)范圍壓縮得越大;c越大,圖像銳化程度越大。
1.3 多尺度Retinex算法(MSR)
由于SSR算法不能同時滿足細節(jié)增強和顏色保真2個特性,Jobson等又提出了多尺度Retinex算法(MSR)。
多尺度Retinex是單尺度Retinex的加權(quán)平均,用r(x,y)表示反射圖像的最終計算結(jié)果,則多尺度Retinex在對數(shù)域中可表示為:
ln[I(x,y)*Gi(x,y)]},
(5)
式中,n表示尺度的個數(shù),通常n=3,為彩色圖像;wi表示加權(quán)系數(shù),假定各個尺度對應(yīng)的權(quán)重相等,則wi=1/3;Gi(x,y)通常是高斯低通濾波器:
(6)
式中,ci表示尺度。
1.4 帶色彩恢復的多尺度Retinex(MSRCR)
MSRCR是多尺度Retinex算法在色彩通道進行線性加權(quán)綜合來提高增強效果,在增強過程中,圖像可能會因為增加了噪聲而造成局部細節(jié)色彩失真,不能顯現(xiàn)出物體的真正顏色效果,使整體視覺效果變差。針對這一不足,引入彩色恢復因子C到MSR算法中,彌補由于圖像局部區(qū)域?qū)Ρ榷仍鰪姸鴮е骂伾д娴娜毕荨8倪M的MSRCR算法可表示為:
RMSRCRi(x,y)=Ci(x,y)·RMSRi(x,y),
(7)
(8)
(9)
式中,Ci表示第i個通道的彩色恢復因子,用來調(diào)節(jié)3個通道顏色的比例;f(.)表示顏色空間的映射函數(shù);β是增益常數(shù);α是受控制的非線性強度。MSRCR算法利用彩色恢復因子C來調(diào)節(jié)原始圖像中3個顏色通道之間的比例關(guān)系,從而把相對暗區(qū)域的信息突顯出來以達到消除圖像色彩失真的缺陷。處理后的圖像局部對比度提高,亮度與真實的場景相似,在人們視覺感知下圖像顯得更加逼真。利用MSRCR算法處理后的圖像像素值一般會出現(xiàn)負值。通過增益參數(shù)G、補償參數(shù)O對圖像修正,可表示為:
(10)
SSR,MSR,MSRCR算法的圖像處理結(jié)果如圖1所示。

圖1 3種Retinex算法處理結(jié)果
對比3種Retinex算法的增強效果,SSR和MSR仍然會引起圖像色彩的失真,而MSRCR增強后的水下圖像能更好地保持原有圖像的色彩。
2 水下圖像清晰化
2.1 物理成像模型
McCartney提出的光傳輸物理模型如下:
I(x)=J(x)t(x)+A[1-t(x)],
(11)
式中,I(x)是目標場景的采集圖像;J(x)是需要恢復的清晰圖像;A是全局背景光,這里先假設(shè)它是已知量;t(x)是光線透射率。圖像清晰化的目的就是從式(11)中求解出J(x)。
2.2 暗原色先驗
暗原色先驗理論的基礎(chǔ)是:無霧圖像的大部分區(qū)域存在暗通道,由于空氣中的霧是灰白色的,其在RGB三通道上的值通常相等。但針對水下環(huán)境特殊的光學特性所導致的水下圖像普遍存在顏色失真問題,直接應(yīng)用暗通道方法進行水下圖像處理并不合適。本文將空氣中的暗原色去霧進行了改進,并結(jié)合MSRCR算法進行顏色修正。
2.3 水下圖像清晰化算法
算法具體流程如圖2所示。
(1)在RGB三個通道上分別建立傳輸模型:
Iλ(x)=Jλ(x)tλ(x)+Aλ[1-tλ(x)]。
(12)
根據(jù)Lamber-Beer定律,光在水中傳輸時以指數(shù)形式衰減[15],
tλ(x)=e-Cλd(x),
(13)
式中,λ為圖像中R,G,B三個顏色通道;Cλ為各通道的衰減系數(shù),d(x)為場景深度。
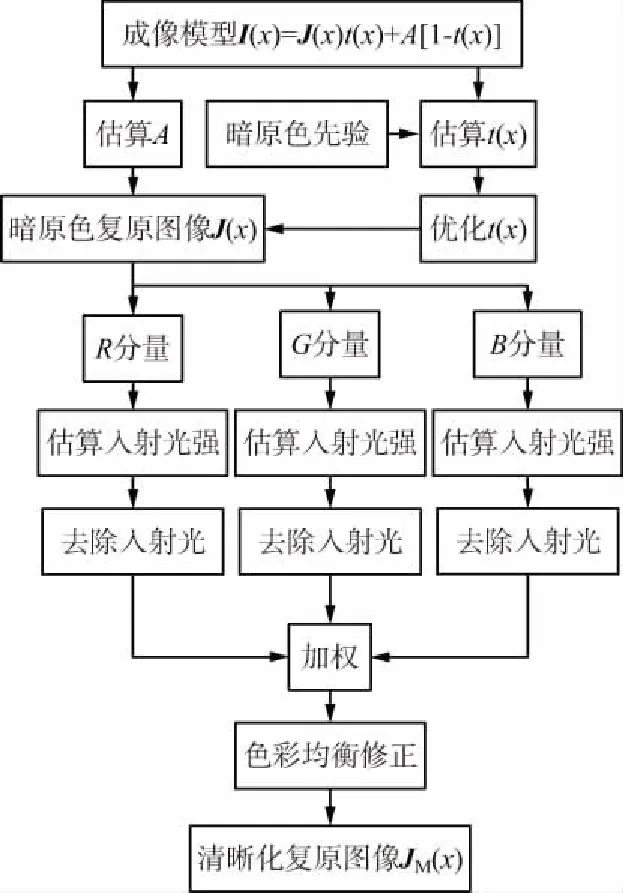
圖2 算法流程
(2)水下暗原色先驗
在RGB三個顏色通道上分別應(yīng)用暗通道先驗,得到:
(14)
式中,Jdark(x)為局部區(qū)域的暗通道值。
(3)計算透射率
假設(shè)局部區(qū)域的透射率不變,可以對圖像分區(qū)域估算透射率,根據(jù)暗原色先驗,每個小區(qū)域內(nèi)應(yīng)該存在某個通道值極低的像素點,可以表示為:
(15)
(16)
(17)
(4)估算背景光
全局背景光是場景中的光線強度,在水下圖像中一般用水體區(qū)域的值近似表示。現(xiàn)有水下暗原色算法,大多沿用空氣中尋找暗通道中值最大的那一部分像素作為背景光A。
在人工輔助照明條件下,這樣選取的背景光值過高。在沒有照明環(huán)境的水下圖像中,這些像素的亮度值又很低。為解決此類問題,結(jié)合水下光學特性與水下退化模型進行分析,將水下圖像背景光與水體光學參數(shù)、相機等參數(shù)建立關(guān)聯(lián)[17-18]。
依據(jù)對海水光學性質(zhì)的分析,得到水下圖像中的背景光Aλ表達式:
Aλ=κβ(θ)Is(x)/cλ,
(18)
式中,κ為一個關(guān)于焦距的常數(shù);cλ為水體的光衰減系數(shù);β(θ)為體積散射系數(shù);針對水下拍攝的圖片,用相應(yīng)的光衰減系數(shù)和體積散射系數(shù)代入式(18);Is(x)表示目標物平面上的光照強度,反映在圖片上可以由圖像最大灰度值代表。從而獲得較為準確的背景光估算值。
將參數(shù)和測量值代入式(11),可以得到暗原色復原后的圖像:
(19)
(5)水下彩色圖像顏色修正
將暗原色方法復原后的初步圖像,帶入式(10),取α=125,β=46,G=192,O=-30,進行MSRCR色彩修正,獲得水下清晰化圖像。
3 實驗結(jié)果與分析
將單一的暗原色先驗算法、MSRCR算法和本文的清晰化算法效果進行比較,分別處理了一副水下生物圖像、24色色卡和數(shù)字分辨率板圖像。
為衡量各算法處理后水下圖像的質(zhì)量,本文采用信息熵和平均梯度這2個客觀質(zhì)量評價指標來對比各種增強算法處理后的圖片。平均梯度越大,表示圖像邊界的灰度變化率越大,反映在圖像上,其細節(jié)分辨力更高。信息熵描述的是圖像的平均信息量。
根據(jù)表1幾種圖像增強算法的客觀評價和圖3~圖5幾種算法處理的生物、色卡、數(shù)字板圖像結(jié)果所示,本文算法結(jié)合了水下成像環(huán)境特征,暗原色方法和MSRCR的特點,克服了單一算法的弊端,得到的清晰化圖像有更好的視覺效果,對比度更強,細節(jié)更突出,色彩恢復更加真實。
表1 幾種圖像增強算法的客觀評價
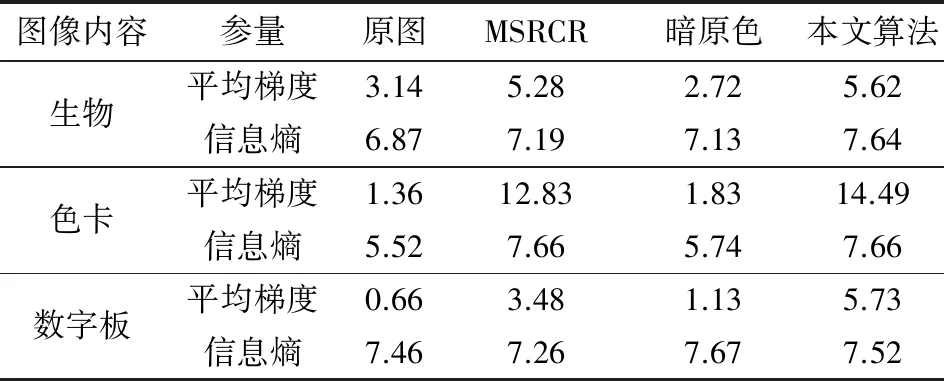
圖像內(nèi)容參量原圖MSRCR暗原色本文算法生物平均梯度3.145.282.725.62信息熵6.877.197.137.64色卡平均梯度1.3612.831.8314.49信息熵5.527.665.747.66數(shù)字板平均梯度0.663.481.135.73信息熵7.467.267.677.52
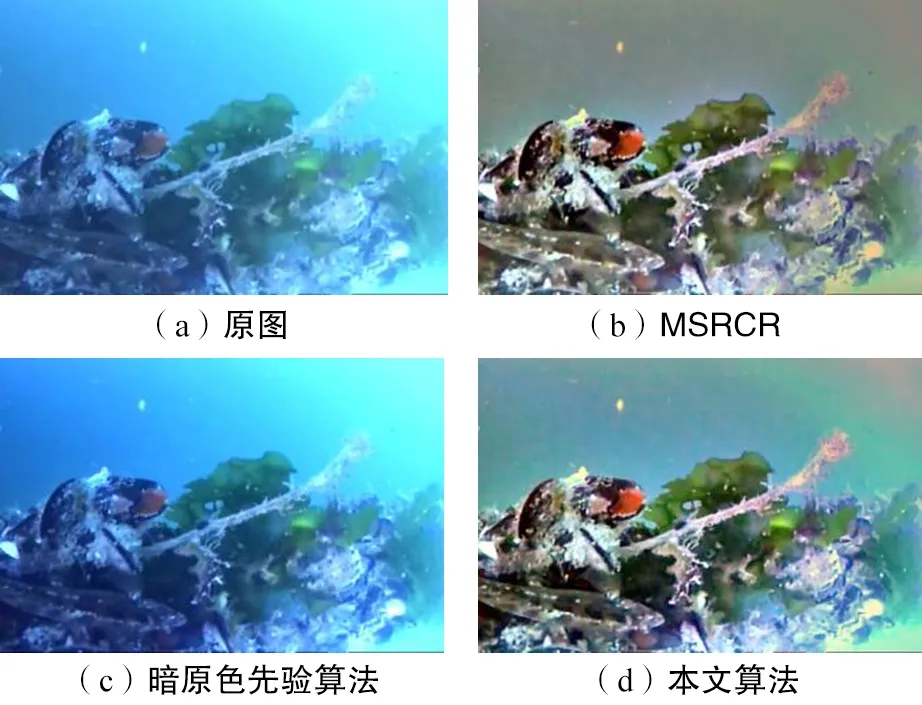
圖3 幾種算法處理的生物圖像結(jié)果
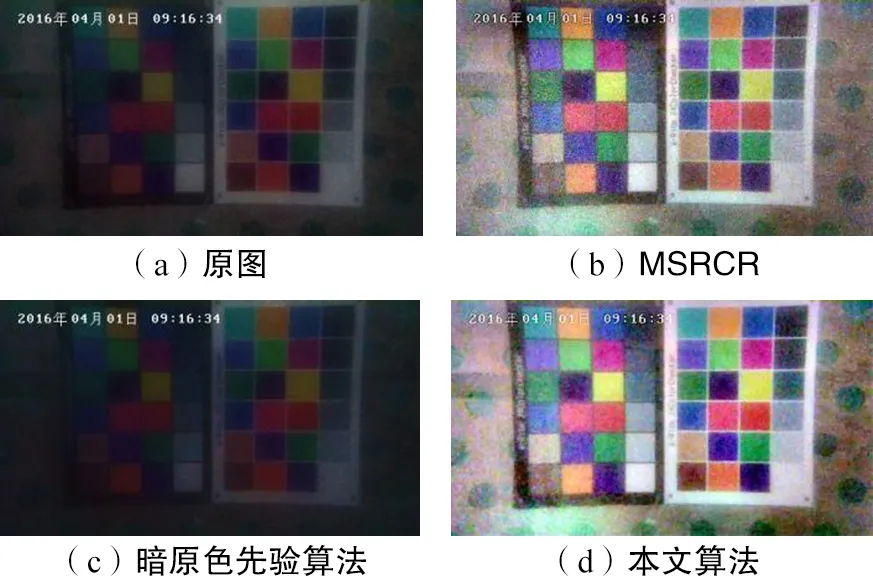
圖4 幾種算法處理的色卡圖像結(jié)果
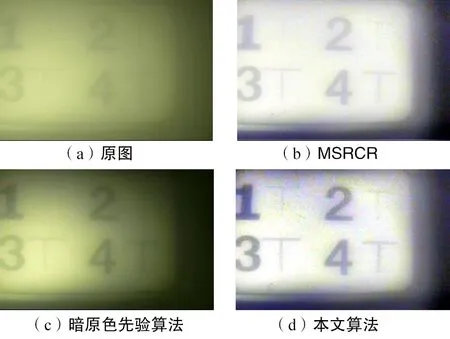
圖5 幾種算法處理的數(shù)字板圖像結(jié)果
4 結(jié)束語
本文在暗原色先驗和Retinex理論基礎(chǔ)上,提出了一種暗原色和MSRCR算法相結(jié)合的水下彩色圖像清晰化算法。實驗結(jié)果表明,該算法在各方面要優(yōu)于暗原色和MSRCR算法單獨處理的效果,能提高圖像對比度,突出細節(jié),并修正圖像的色彩偏差,使處理后的圖像更加清晰,更有利于后續(xù)對水下目標的檢測和特征提取。
猜你喜歡
百科知識(2022年5期)2022-04-04 13:23:39
百科知識(2022年4期)2022-02-19 18:50:47
科普童話·學霸日記(2021年3期)2021-09-05 16:56:51
少兒美術(shù)(2021年1期)2021-04-26 14:22:08
活力(2019年17期)2019-11-26 00:42:34
小天使·一年級語數(shù)英綜合(2018年11期)2018-11-23 09:47:26
小資CHIC!ELEGANCE(2018年24期)2018-08-13 03:31:56
小學生學習指導(低年級)(2018年4期)2018-03-12 06:14:38
軍事文摘·科學少年(2017年1期)2017-04-26 18:30:13
環(huán)球人物(2016年9期)2016-04-20 03:03:30