傳感器智能數據確認與故障診斷方法研究
2019-08-26 01:30:27宋聰
山東工業技術 2019年24期
關鍵詞:故障診斷
宋聰
摘 要:故障檢測與診斷(Fault Detection and Diagnosis,FDD)技術廣泛應用于航空航天、能源、石油化工等生產領域中。FDD 應用于傳感器領域的基本術語有:傳感器故障診斷(Sensor Fault Diagnosis,SFD)、傳感器自確認(Sensor SelfValidation,SEVA)、傳感器數據確認(Sensor Data Validation,SDV)和傳感器性能監視(Sensor Performance Monitoring,SPM)等。本文主要對傳感器數據確認和故障診斷的研究成果進行了總結,希望可以拋磚引玉,對相關領域的研究有所貢獻。
關鍵詞:傳感器數據確認;故障診斷;支持向量機
DOI:10.16640/j.cnki.37-1222/t.2019.24.072
1 傳感器數據確認和故障診斷的研究方法分類
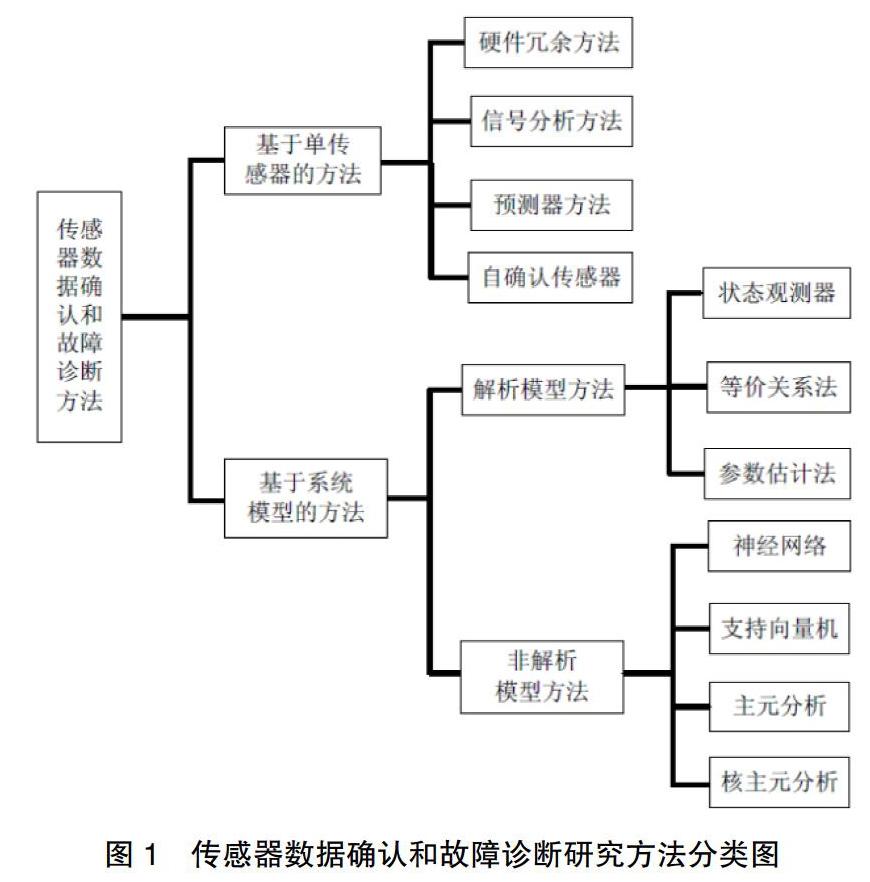
傳感器數據確認和故障診斷方法通常按照硬件冗余和解析冗余進行分類,這里根據傳感器數據確認和故障診斷基準點的不同,結合本文的研究思路,給出另一種分類方法。通過對近年來發展的方法進行分析,根據開展工作基準點的不同,傳感器數據確認和故障診斷可以分為基于單傳感器(變量)角的方法和基于系統模型的方法兩大類,圖1所示為研究方法分類圖。
2 基于單傳感器的數據確認和故障診斷方法概述
基于單傳感器(單變量)的方法從單個傳感器的角度考慮數據確認和故障診斷問題,主要包括硬件冗余法、信號分析法和傳感器預測器法等。由于自確認傳感器所采用的方法和目的都具有一定的特殊性.常見的方法有:硬件冗余方法;信號分析方法;傳感器預測器方法;自確認傳感器等方法。
3 基于系統模型的數據確認和故障診斷方法概述
3.1 解析模型方法
3.1.1 狀態觀測器法
作為狀態觀測器法,龍伯格觀測器(Luemberger observers)和卡爾曼濾波器(Kalman filters)被廣泛應用于系統的故障檢測與分離。狀態觀測器或濾波器利用測量值及相關可用信息重構系統的狀態,當系統沒有故障時,測量值與重構估計值之間的殘差為零均值且噪聲的統計特性(如方差)在容許范圍之內;當系統含有故障時,殘差信號的均值則不為零或/和噪聲將超出設定的閾值。
卡爾曼濾波器法的原理是:被測量與卡爾曼濾波器輸出所產生的殘差在系統傳感器工作正常情況下為零均值白噪聲序列,當傳感器出現故障后,殘差將多出一個增量從而不再具有零均白噪聲特性。汪聲遠根據上述原理,研究了發動機電控系統傳感器的故障檢測與分離問題。Dalle Molle 等人首先將EKF 應用于非線性化工生產過程的傳感器故障檢測與診斷中,取得了滿意的效果。
為了實現多傳感器故障診斷,基于狀態觀測器(估計器或濾波器)的方法需要為每個傳感器都設計一個專用的觀測器,以便生成殘差空間,將多個故障傳感器檢測和分離出來。基于狀態觀測器方法的優點在于:該方法對于傳感器故障比較靈敏;可以處理噪聲帶來的影響;可以處理非線性系統。但是同時也具有如下的一些缺點:設計觀測器需要建立系統或過程較為精確的數學模型;當傳感器數量比較大時,需要很大的計算量。
3.1.2 等價關系法
等價關系法利用系統數學方程中的兩類冗余關系,即直接冗余( DirectRedundancy)和時間冗余(Temporal Redundancy),作為系統或傳感器故障檢測與診斷的基礎。根據這兩類關系,可建立系統的標稱模型,此模型可以對傳感器輸出進行一致性檢驗,利用適當的殘差函數產生殘差,從而實現系統故障或者傳感器故障的檢測與分離。Gertler 等學者對基于等價關系的故障檢測與分離方法進行了系統的研究,指出觀測器與等價關系之間具有密切的聯系,并詳細討論了等價關系的有關理論和實現方法。
3.1.3 參數估計法
參數估計法(也可稱為基于參數模型的方法)比狀態觀測器法更適合與非線性系統。參數估計的方法有強跟蹤濾波器法、最小二乘法、突變檢測法等。
劉志成研究了強跟蹤濾波器在過程控制系統傳感器故障診斷中的應用。Huang 等學者把突變檢測法引入到控制回路性能監視與評估中,目的在于通過對系統(回路)參數的微小變化進行檢測來監視回路的工作性能,并作出評估。局部漸進法能非常有效地檢測系統參數的小變化,因而有利于早期微小故障的檢測。Huang 還結合了總體最小二乘(Total LeastSquares,TLS)模型與突變檢測法。Ashish 等人將局部漸進法與輸入獨立卡爾曼濾波器(Input Independent Kalman Filter,IIKF)相結合,對一類輸入未知系統的性能監視進行研究,利用IIKF 輸出與實際系統輸出所產生的殘差作為充分統計量進行監視,從而到監視系統的目的。
3.2 非解析模型方法
3.2.1 人工神經網絡模型
人工神經網絡(Artificial Neural Network,ANN)是以計算機網絡系統模擬生物神經網絡的智能計算系統。網絡上的每個結點相當于一個神經元,經可以記憶(存儲)、處理一定的信息,并與其它結點并行工作。
ANN 由于強大的并行運算和聯想能力,因而非常適合于系統的故障診斷與狀態識別。由于ANN 具有優良的非線性映射功能,因此也被用作構造系統觀測器。基于ANN 觀測器的方法是一種借鑒傳統觀測器原理發展而來的故障診斷的方法。此方法根據借鑒傳統觀測器模型的思想,利用系統正常運行時獲取的數據樣本訓練神經網絡并構建ANN 觀測器,訓練所得到的ANN 絡觀測器可用于產生故障殘差。
Guo等學者利用神經網絡構建了航天飛機主引擎控制系統傳感器故障檢測與數據恢復系統。此系統利用主引擎中被測變量的數目遠高于系統階數,包含內在冗余關系的特性檢驗和恢復傳感器數據。系統包括兩級神經網絡,第一級用來識別與其它數據不符的傳感器輸出,第二級根據其他正常的數據對發生異常的傳感器輸出數據進行重構。李東輝針對空調系統的系統建模非常復雜,而且在運行過程中存在工況變化及參數漂移等情況,將小波神經網絡應用于空調機組傳感器故障診斷問題。
3.2.2 支持向量機模型
支持向量機(Support Vector Machines,SVM)是一種新興的基于統計學習理論的機器學習方法,能夠較好的解決小樣本學習問題,已成為國際上機器學習領域新的研究熱點。近些年來被引入到動態系統故障檢測與診斷領域當中,并進行了初步的應用研究。
3.2.3 核主元分析模型
核主元分析方法(Kernel Principal Component Analysis,KPCA)是Scholkopf 等學者提出的一種非線性PCA 方法。KPCA 通過“核技巧”將輸入空間映射到高維的特征空間中,從而將原輸入空間中的非線性問題轉化為特征空間中的線性問題。KPCA 方法的優點在于結構簡潔,易于實現,近年來引起了許多學者的關注,并被成功應用于非線性系統的故障檢測與診斷。
4 總結
基于單傳感器輸出序列預測器的方法獲得了充分的研究,目前的趨勢集中在如何建立精確地預測器模型方面,SVM 的出現為這一問題提供了新的思路解決方法;基于信號處理的方法無需對象數學模型,而且可明顯地抑制噪聲,在傳感器故障診斷領域也獲得廣泛研究,由于小波包在信號處理方面體現出的良好的時頻特性,使之成為近年的研究熱點。
基于系統解析模型的方法診斷機理清楚,非解析系統模型,是以觀測數據為依據,建立一種診斷模型是通過一定的學習方式,使之區別于系統物理(機理)模型和解析模型。這一類模型主要包括人工神經網絡模型、支持向量機模型、主元分析模型以及核主元分析模型等。已經成為一個重要的研究內容。
參考文獻:
[1]王冰,刁鳴,宋凱.基于小波奇異熵和相關向量機的氫氣傳感器故障診斷[J].電機與控制學報,2015(01):96-101.
[2]馬天兵,杜菲,熊能,錢星光.柔性機械臂振動控制中的壓電傳感器故障診斷[J].電子測量與儀器學報,2014(12):1408-1413.
[3]賽吉爾呼,戴盛芳,董愛華,苗清影.基于SVM和RBFN的汽車主動降噪系統傳感器故障診斷[J].傳感技術學報,2014(04):512-517.
[4]丁碩,常曉恒,巫慶輝,楊友林,胡慶功.基于Elman神經網絡的傳感器故障診斷研究[J].國外電子測量技術,2014(04):72-75.
[5]王通,高憲文,藺雪,劉春芳.SWE-IPCA方法在傳感器故障診斷中的應用[J].儀器儀表學報,2013(08):1841-1846.
猜你喜歡
一重技術(2021年5期)2022-01-18 05:42:10
水泵技術(2021年3期)2021-08-14 02:09:20
裝備制造技術(2020年3期)2020-12-25 05:22:30
制造技術與機床(2018年11期)2018-11-23 01:07:42
電子制作(2018年10期)2018-08-04 03:24:46
制造技術與機床(2017年10期)2017-11-28 05:20:43
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
振動工程學報(2014年2期)2014-03-01 01:15:22
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
振動、測試與診斷(2014年4期)2014-03-01 01:14:00