多傳感器數據關聯方法
2019-09-07 07:13:18呂奇辰中國人民解放軍93117部隊
數碼世界 2019年9期
呂奇辰 中國人民解放軍93117 部隊
引言
多目標實時跟蹤過程中,多個傳感器對同一目標的測量數據,具有相似特征,但雜波干擾和傳感器的測量誤差,使得測量數據的特征不完全相同,利用相似特征來判定量測數據的來源就是數據關聯方法。
數據關聯通常分為幾種方式,其中觀測/點跡與觀測/點跡關聯、觀測/點跡與航跡關聯,一般用于集中式結構;而在分布式信息處理系統中多采用航跡與航跡關聯。三種方式都存在于多傳感器系統中,按照給定的準則,對數據進行處理,去除干擾數據,實現對航跡的初始化,即為數據關聯的任務。
1 集中式數據關聯方法
1.1 最近鄰域數據關聯(NNDA)
最近鄰域數據關聯算法屬于數據挖掘技術,是最簡單、最有效、最早提出的數據關聯方法之一。如圖1 所示,NNDA 中的N 表示統計距離達到最小或是殘差概率密度為最大。
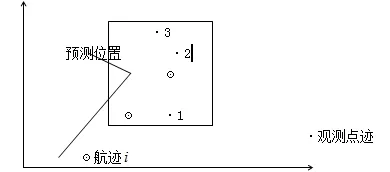
圖1 最近鄰域數據關聯
該方法適用于跟蹤目標稀疏的情況,是一種局部最優的“貪心算法”,NNDA 算法的運算量小,易于實現,但在雜波干擾或者目標密集的情況下,錯誤關聯較多。
1.2 聯合概率數據關聯(JPDA)
JPDA 是Bar Shalom 等人提出的一種數據關聯算法,當觀測數據落入跟蹤門相交區域時,表示這些觀測數據可能來源于多個目標。JPDA 計算觀測數據與每一個目標之間的關聯概率,認為所有的有效回波都源于每個特定目標的概率不同。在雜波環境中JPDA 方法對多目標跟蹤的結果較為理想,不需要任何關于目標和雜波的先驗信息,但目標和量測數目增多時,與其他算法相比,計算比較復雜,算法詳見文獻。
2 分布式航跡關聯方法
考慮到系統中分布于不同位置的傳感器,其信息處理系統的航跡是否具有唯一目標指向性,傳感器覆蓋范圍內是否存在重復跟蹤目標的問題,航跡關聯算法可以分為基于統計和基于模糊數學的算法。
2.1 基于統計的算法
航跡關聯問題可以通過不同的檢驗統計轉化成假設檢驗問題,如加權修正法、最近鄰域法、序貫法和雙門限法等。加權修正法在密集目標環境下關聯性能下降,在交叉和分岔航跡較多的場合會出現較多錯漏關聯航跡,最近鄰域法也存在錯漏關聯航跡的情況,序貫算法和雙門限算法能較好的修正這個問題。
(1)加權修正

當航跡估計誤差間不獨立時,可以修正檢驗統計量為:

(2)最近鄰域法

(3)序貫法和雙門限法
序貫法考慮歷史航跡,改善了加權修正法的問題。該算法來源于雷達信號中的序貫檢測。
雙門限法,需要設定計數器T,流程如圖2 所示,對R 個估計誤差樣本(系統中兩個任意節點),逐個基于X2分布門限進行假設檢驗,若判定為同一目標的航跡,則T=T+1,否則T 不變。將T 與指定的數 L 進行比較,經過R 次檢驗后,如果T ≥L,航跡關聯判決結束,否則判定為不關聯航跡。

圖2 雙門限法流程圖
2.2 基于模糊數學的航跡關聯方法
在某些場合中,例如目標密集、隨機目標較多、存在較多分岔航跡或者系統中存在較大導航誤差、傳感器校準誤差、傳感器轉換和延遲誤差,用統計學方法來判斷航跡關聯性是很困難的,不能滿足實際要求。
考慮到在航跡關聯判決中的模糊性,可以用隸屬度函數來界定兩個航跡的相似程度,這種方法可以稱之為模糊航跡關聯法。可細分為模糊函數法和模糊邏輯法,其特點見表1。

表1 基于模糊數學的航跡關聯法
3 結論
航跡關聯問題在傳感器的間距遠或沒有干擾時,比較簡單。對于多目標、噪聲、多交叉及分岔航跡的情況,就會比較困難。再考慮更實際的狀況,比如傳感器組合失配、傳感器位置誤差、監測目標的誤差,航跡關聯問題就更為復雜。
文中提到的加權修正法等統計方法均是在某時刻就做出最終判決,準確度不可控。概率數據關聯算法或者將各種算法進行組合優化,會相對完善,但是目標增多時,計算量會劇增,應進一步探討簡單實用的關聯方法。
猜你喜歡
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:30
當代陜西(2021年17期)2021-11-06 03:21:36
當代陜西(2019年15期)2019-09-02 01:52:00
兒童故事畫報(2019年5期)2019-05-26 14:26:14
學苑創造·A版(2018年11期)2018-02-01 06:29:20
讀者(2017年5期)2017-02-15 18:04:18
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
