基于異常單元刪除的改進CFAR檢測器
2019-09-09 10:38:14劉恒燕凱2梁曉軍3李啟超
雷達科學與技術 2019年4期
劉恒燕,熊 偉,宋 杰,周 凱2,梁曉軍3,李啟超
(1.海軍航空大學,山東煙臺 264001; 2.中國人民解放軍91917部隊,北京 102100;3.中國人民解放軍91951部隊,山東威海 264200)
0 引 言
與低分辨率、低入射余角下檢測不同,高分辨率大入射余角海雜波下目標檢測面臨一系列問題。隨著入射余角增大,海面等效后向散射截面積迅速增大,大部分海雜波能量投射到少數距離單元,造成了能量空間分布不均勻,從檢測角度看,檢測單元所處環(huán)境變得相對復雜多變。傳統(tǒng)CFAR檢測器的檢測性能大大下降。虛警概率與誤檢概率大大增加。文獻[1]提出了自動刪除單元平均(ACCA-ODV-)CFAR檢測器。ACCA-ODV-CFAR檢測器在多目標環(huán)境中的穩(wěn)定性同CA-CFAR在均勻環(huán)境中一樣,在雜波邊緣有著良好的虛警控制能力。文獻[2]提出了可以適應不同環(huán)境的復合探測器——變化指數(VI-)CFAR檢測器,它是基于單元平均(CA-)CFAR、最小選擇(SO-)CFAR、最大選擇(GO-)CFAR的一種綜合檢測方法。該算法能夠通過計算參考單元的二階統(tǒng)計量(即變化指數VI)以及前后滑窗均值之比,動態(tài)地調整雜波功率的估計水平,在均勻環(huán)境中具有較低的CFAR損失,在存在干擾和雜波邊緣的非均勻環(huán)境中表現出與CA-CFAR近乎相同的魯棒性[3],但在有4個及以上干擾目標時檢測性能下降嚴重。
此外,由于海雜波空間分布不均勻,出現了能量突然增大的異常單元,使得檢測器對參考單元所處環(huán)境的誤判概率增加,降低了檢測性能。為解決這個問題,在海雜波進入檢測器前進行雜波抑制,去除能量突然增大的海雜波異常單元的影響。文獻[4]提出了一個在多目標情況下基于正定矩陣空間和有限訓練樣本的新檢測結構PDLT,仿真說明了PDLT在多目標情況下檢測性能的穩(wěn)健性,證明了協(xié)方差矩陣在估計雜波功率具有可靠性。本文使用參考單元協(xié)方差矩陣構造正定矩陣來估計背景功率水平,根據背景功率設置動態(tài)門限,去除異常單元。同時用ACCA-CFAR代替VI-CFAR中的CA-CFAR與SO-CFAR檢測器,對去除異常單元后的數據進行檢測。該檢測器命名為基于異常單元刪除的改進可變指數(CVI-)CFAR檢測器。
1 算法描述
如圖1所示,從匹配濾波接收器接收的回波同相I路信號和正交Q路信號作為整個算法的輸入信號。對于均勻噪聲加雜波環(huán)境,I和Q信號為零均值獨立同分布(IID)高斯隨機過程[5]。因此,平方律檢波器輸出指數分布隨機變量,連續(xù)發(fā)送到長度為N的抽頭延遲線,對應偶數N個參考窗口。參考單元為xn(n=1,2,…,N),D為測試單元。
CVI-CFAR檢測器共包含雜波抑制模塊與CFAR模塊兩大部分。雜波抑制模塊的主要作用是設置動態(tài)門限,并對數據進行預處理,即去除異常單元。其中動態(tài)門限的設置是通過參考單元協(xié)方差矩陣進行功率估計,再設置合適調整因子得到的。CFAR模塊的主要任務是對預處理后的數據進行目標檢測,輸出檢測結果。該模塊由VI-CFAR檢測器改進得來,最大的改進在于環(huán)境判別方法與用ACCA-CFAR代替VI-CFAR中的CA-CFAR與SO-CFAR部分。
1.1 雜波抑制模塊
高分辨率大入射余角海雜波異常單元有如下特點:雜波功率突然增大,遠高于周圍距離單元;時間相關性及空間相關性突然成倍增加。異常單元的存在大大增加了虛警及誤檢概率。雜波抑制模塊的任務就是設置動態(tài)門限以刪除異常單元。

(1)

1.2 CFAR模塊
(2)

前滑窗和測試單元的可變指數記為VIA,后滑窗和測試單元的可變指數記為VIB。均勻環(huán)境中,目標信號處于測試單元中,低功率噪聲在參考窗口中,此時認為VIA和VIB都是不變的。同樣地,如果一個或多個干擾目標存在于前滑窗或后滑窗中,VIA和VIB仍然為不變的環(huán)境,此時選擇ACCA-CFAR檢測器,自適應門限為ACCA-CFAR在均勻環(huán)境及多目標環(huán)境中的檢測門限。對于雜波邊緣環(huán)境,雜波首先進入參考窗口,一個或多個前滑窗單元將會出現較高的功率雜波。但測試單元和后滑窗只包含低功率噪聲。此時此刻,VIA可變,VIB不可變。隨著雜波的繼續(xù)進入后滑窗,VIA不變,VIB可變。最后,雜波同時占據了前滑窗和后滑窗,兩個指數均不變。此時,選擇GO-CFAR,自適應門限為GO-CFAR在雜波邊緣的檢測門限。可變指數、自適應檢測門限與環(huán)境的關系總結如表1所示。

表1 可變指數與環(huán)境的關系
2 性能分析
2.1 檢測性能分析
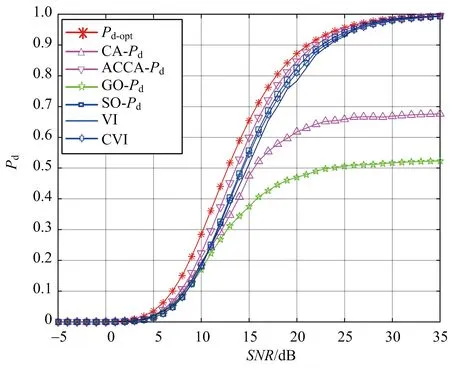
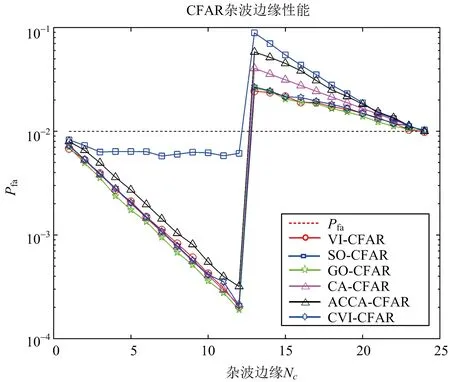
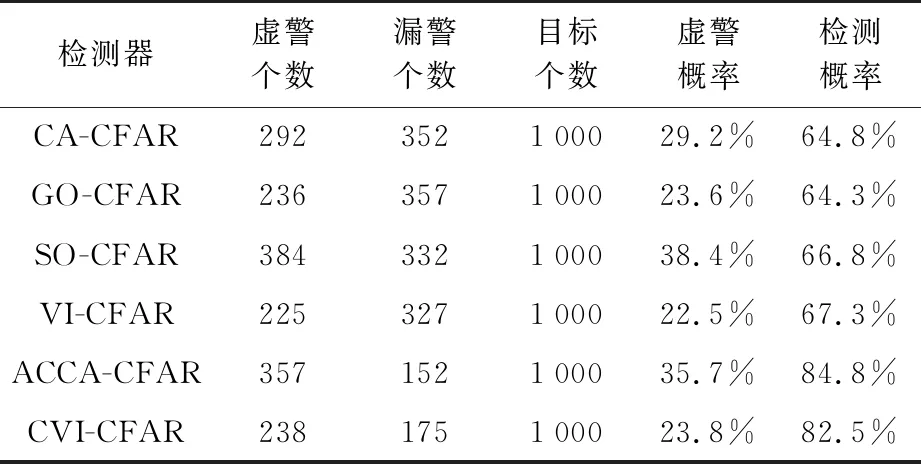
由于誤判現象的存在,在已選擇檢測器的基礎上會額外帶來檢測概率與虛警概率的變化,當實際情況為均勻雜波或者多目標背景下有目標時,輸出應為y=1且D>TACCA,如果因為誤判而輸出y=-1且D Pd,PSVM=Pd,ACCA-μ (3) 式中,μ=P[y=-1,D Pfa,PSVM=Pfa,GO+ν (4) 式中,ν=P[y=1,D>TACCA|y=-1,D 選取36個參考單元,分別畫出最優(yōu)檢測器,CA-CFAR,ACCA-CFAR,GO-CFAR,SO-CFAR,VI-CFAR以及CVI-CFAR檢測器分別在均勻環(huán)境、一個干擾目標、4個干擾目標的檢測概率曲線及雜波邊緣環(huán)境下的虛警概率曲線。圖2顯示的是各個檢測器在均勻環(huán)境不同信噪比下的檢測概率曲線。CA-CFAR檢測器、ACCA-CFAR檢測器與CVI-CFAR檢測器檢測性能幾乎相同,VI-CFAR檢測性能略次之,其次是SO-CFAR檢測器,最差的是SO-CFAR檢測器。 圖2 均勻環(huán)境下檢測概率曲線 圖3顯示的是各個檢測器在一個干擾目標環(huán)境不同信噪比下的檢測概率曲線。CA-CFAR檢測器、GO-CFAR檢測器檢測性能下降嚴重,ACCA-CFAR檢測性能最佳,其次是SO-CFAR/CVI-CFAR與VI-CFAR。 圖4顯示的是各個檢測器在4個干擾目標環(huán)境不同信噪比下的檢測概率曲線。CA-CFAR檢測器、GO-CFAR檢測器檢測性能進一步下降,SO-CFAR,VI-CFAR下降嚴重,CVI-CFAR檢測性能也大幅下降。ACCA-CFAR檢測性能最佳,在多目標環(huán)境中檢測性能穩(wěn)定。 圖3 一個干擾目標時檢測概率曲線 圖4 4個干擾目標時檢測概率曲線 圖5顯示的是各個檢測器在雜波邊緣環(huán)境不同信噪比下的虛警概率曲線。虛警控制能力由高到低依次為VI-CFAR,GO-CFAR,CVI-CFAR,CA-CFAR,ACCA-CFAR及SO-CFAR。 圖5 虛警概率曲線 本次使用高分辨大入射余角海雜波數據依舊由Ku波段雷達采集,極化方式為水平極化,距離分辨率為1.8 m,設置虛警概率為Pfa=10-6,采集時海面風平浪靜。保護窗口為1×100、背景窗口為1×200。用K分布擬合入射余角分別約為44°,59°,69°,74°四組數據的仿真結果如表2~表5所示,調整因子取經驗值0.9。 表2 44°入射余角實測數據仿真結果 44°入射余角實測數據K分布仿真擬合,各檢測器表現如表2所示,檢測概率由高到低依次為ACCA-CFAR,CVI-CFAR,SO-CFAR,VI-CFAR,CA-CFAR,GO-CFAR,其中ACCA-CFAR的檢測概率為95.9%。虛警概率由低到高依次為VI-CFAR,GO-CFAR,CVI-CFAR,CA-CFAR,ACCA-CFAR,SO-CFAR,其中虛警概率最低的為18.4%。 表3 59°入射余角實測數據仿真結果 59°入射余角實測數據K分布仿真擬合,各檢測器表現如表3所示,檢測概率由高到低依次為ACCA-CFAR,CVI-CFAR,VI-CFAR,SO-CFAR,CA-CFAR,GO-CFAR,其中ACCA-CFAR的檢測概率為95.8%。虛警概率由低到高依次為VI-CFAR,GO-CFAR,CVI-CFAR,CA-CFAR,ACCA-CFAR,SO-CFAR,其中虛警概率最低的為19.3%。 表4 69°入射余角實測數據仿真結果 69°入射余角實測數據K分布仿真擬合,各檢測器表現如表4所示,檢測概率由高到低依次為ACCA-CFAR,CVI-CFAR,VI-CFAR,SO-CFAR,CA-CFAR,GO-CFAR,其中ACCA-CFAR的檢測概率為89.9%。虛警概率由低到高依次為VI-CFAR,GO-CFAR,CVI-CFAR,CA-CFAR,ACCA-CFAR,SO-CFAR,其中虛警概率最低的為20.2%。 表5 74°入射余角實測數據仿真結果 74°入射余角實測數據K分布仿真擬合,各檢測器表現如表5所示,檢測概率由高到低依次為ACCA-CFAR,CVI-CFAR,VI-CFAR,SO-CFAR,CA-CFAR,GO-CFAR,其中ACCA-CFAR的檢測概率為84.8%。虛警概率由低到高依次為VI-CFAR,GO-CFAR,CVI-CFAR,CA-CFAR,ACCA-CFAR,SO-CFAR,其中虛警概率最低的為22.5%。 本文首先簡單介紹包括CA-CFAR,SO-CFAR,GO-CFAR的傳統(tǒng)均值類CFAR與VI-CFAR,ACCA-ODV-CFAR兩個基于自適應閾值的CFAR,分析以上傳統(tǒng)檢測器在各個不同雜波環(huán)境下的性能。然后介紹高分辨大入射余角海雜波的特點,針對此環(huán)境下目標檢測時傳統(tǒng)CFAR面臨的困難,提出CVI-CFAR,具體介紹其設計思想、算法描述及算法性能分析。性能仿真結果表明,CVI-CFAR在均勻雜波環(huán)境中及在一個干擾目標環(huán)境中表現出性能穩(wěn)定,在存在4個干擾目標場景時檢測器性能略有下降。其雜波邊緣環(huán)境虛警控制能力幾乎與GO-CFAR相同。實測數據仿真結果與性能仿真結果基本相同,綜合考慮實測數據中各個檢測器的檢測結果,CVI-CFAR在高分辨大入射余角情況下具有良好的綜合檢測性能。2.2 仿真結果驗證


3 高分辨率大入射余角實測數據驗證



4 結束語
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58中老年保健(2021年12期)2021-08-24 03:30:40中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46中國生殖健康(2020年6期)2020-02-01 06:28:50新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18中國生殖健康(2019年11期)2019-01-07 01:28:02