基于改進ViBe的穿墻雷達動目標檢測算法
2019-09-09 03:41:22
雷達科學與技術 2019年4期
關鍵詞:檢測
(桂林電子科技大學信息與通信學院,廣西桂林 541004)
0 引 言
穿墻雷達(Through-Wall Radar,TWR)是通過發射超寬帶(UWR)電磁波,穿透墻壁、樹叢、隔板等障礙物,并分析接收到的目標回波信號,對隱藏在障礙物后的目標進行探測的新型雷達[1-2]。
穿墻雷達動目標檢測方法分為兩種:一種是利用一維回波信號定位確定目標狀態方法[3-4];另一種是通過回波信息成像后的目標檢測方法[5]。后者較前者具有目標定位精度高,能以圖像直觀地展示目標信息。該方法包括對回波數據預處理、回波成像、目標檢測、目標位置提取等方面[6]。本文基于圖像域的檢測原理,針對實時性較差,不能完全消除虛警現象等問題,提出了基于ViBe的穿墻雷達信號動目標檢測改進方法,該方法不需要預處理步驟,簡化了動目標檢測方法步驟。
目前,在穿墻雷達基于圖像域的目標檢測方法中,Buonanno 等提取圖像中像素最大值的20%作為全局閾值[7],Chalabi 等通過平均值和標準差設計閾值[8]。上述方法僅對單個移動目標的情況有效。且由于接收天線采集的穿墻雷達回波信號強度不均勻,將導致嚴重的漏檢問題。為此,文獻[9]采用恒虛警(Constant False Alarm Rate, CFAR)檢測方法,通過局部信息自適應地計算閾值,較好地解決了漏檢問題。但實驗發現CFAR中有兩個不足:一是封閉環境內存在強雜波,CFAR無法消除虛警像素點,干擾用戶對目標信息的判斷;二是CFAR需要對回波數據進行預處理,實時性較差。針對上述問題,本文提出基于ViBe動目標檢測改進方法,該方法能夠適應室內環境中強雜波干擾,實時地檢測目標動態變化,準確地提供目標的位置信息。
ViBe(Visual Background Extractor)[10]算法常用于計算機視頻處理中,它采用隨機聚類技術從視頻序列每一個像素的8鄰域內隨機采集樣本用于初始化背景模型。背景模型不需要經過多幀的訓練,從第2幀開始就可以檢測出運動目標。但在穿墻雷達回波成像的多幀序列中,隨著目標移動到不同位置,成像后的動目標像素值是不相等的,這與普通視頻圖像目標像素值相等有差異。因此,ViBe算法并不能直接用于穿墻雷達生成圖像中動目標的識別。同時,由于初始的穿墻雷達圖像背景樣本中存在目標像素,導致結果中會出現“鬼影”像素點和孤立噪點等現象。
為了解決上述問題,本文改進傳統ViBe算法,在算法中加入動態閾值,使其能適應穿墻雷達圖像像素值變化問題。在此基礎上,為避免“鬼影”像素點和孤立噪點等現象,利用三幀差[11]消除了“鬼影”現象,再利用連通域消除圖像中的孤立噪點,彌補了ViBe算法的不足。通過仿真和實測實驗,驗證了本文方法可以準確提供目標的位置信息,消除虛警,具有實時性和穩定性,適合對穿墻雷達動目標進行檢測。
1 信號模型與成像
超寬帶穿墻雷達探測近似模型[12]如圖1所示。
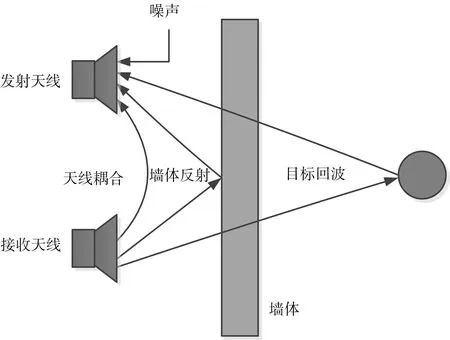
圖1 超寬帶穿墻雷達探測示意圖
發射信號和回波信號間的關系用線性模型近似描述為
d(t)=starget(t)+swall(t)+scoupling(t)+snoise(t)
(1)
式中,d(t)代表穿墻雷達獲取的回波信號,starget(t)代表墻體后真實目標的反射回波,swall(t)代表墻體直接反射信號產生的回波,scoupling(t)代表收發天線之間的直接耦合波,snoise(t)代表測量和系統引發的隨機噪聲,包括空間噪聲和射頻干擾信號。目標成像算法從回波信號d(t)檢測出starget(t)。采用BP(Back Projection)[13]法成像。由于墻體等障礙物和天線耦合的存在,動目標電磁回波能量非常微弱,圖像中出現大量的虛假像素點,影響檢測算法準確地提取目標信息。本文的動目標檢測改進方法可以解決上述問題。
2 ViBe算法原理
ViBe算法為每個背景像素點存儲一個樣本集合,將當前每一個新的像素值和樣本集合比較,判斷新的像素點是否為背景點。算法分為3個步驟:背景初始化、像素分類和背景更新策略。
2.1 背景模型初始化
算法采用第1幀圖像構造初始背景模型。第1幀中的每一個像素v(x)的背景模型為N個樣本組成的一個集合M(x),其中x為當前像素值。N個樣本由v(x)自身鄰域(通常為8鄰域)隨機抽樣獲得,重復抽取得到M(x),如式(2):
M(x)=(v(x1),v(x2),…,v(xj),…,v(xN))
(2)
式中,j∈(1,2,…,N)。
2.2 像素分類
ViBe算法從第2幀圖像開始進行像素分類。假設當前待測像素點的像素值為P(x),歐式空間為SR(P(x)),P(x)為SR(P(x))的圓心,R為SR(P(x))的半徑。將M(x)與SR(P(x))取交集,輸出結果為C(x),如式(3):

(3)
式中,Tmin為M(x)與SR(P(x))交集個數的閾值。當M(x)與SR(P(x))交集個數大于Tmin,P(x)為背景像素,C(x)=0;當M(x)與SR(P(x))交集數小于Tmin,P(x)為目標像素,C(x)=1。
2.3 背景更新策略
采用無記憶策略來更新背景。當某個像素點被判定為背景像素點,則使用該背景像素點代替從M(x)隨機選取的一個樣本值,形成新的背景樣本。這種無記憶更新策略避免了像素長期保留在背景模型中,使算法對環境有較強的適應性能。
3 自適應動態閾值ViBe算法
在不同時刻,隨著目標移動,雷達接收的目標回波能量大小是變化的,這導致成像后不同時刻的動目標像素的像素值大小也是不相等的。如果直接采用傳統的ViBe的固定閾值進行像素分類,處理后的圖像中會出現大量虛警像素。同時,由于墻體、天線耦合等強雜波的干擾,圖像中會出現“鬼影”和孤立噪聲。為解決上述問題,本文提出采用自適應動態閾值,結合三幀差和連通域判定的方法。
3.1 動態閾值
R(x)由圖像的最大值和M(x)的均方差σ(x)決定,如下式所示:
R(x)=0.5×max(M(x))×σ(x)
(4)
(5)
將R(x)用于動目標像素的判別,代替傳統ViBe像素分類。其步驟為:首先計算待測像素與樣本值的差(v′1,v′2,…,v′N)。假設#min定義為交點個數閾值。當R(x)與(v′1,v′2,…,v′N)的交點個數小于#min時,該像素可視為移動目標(使用D1i(x,y)=1來表示)。否則,將其視為背景像素點(使用D1i(x,y)=0表示)。同時更新背景模型,如下式所示:
(v′1,v′2,…,v′N)=(P(x)-v(x1),P(x)-
v(x2),…,P(x)-v(xN))
(6)
D1i(x,y)=
(7)
改進后的ViBe算法對閾值進行動態更新,能夠很好適應動目標的變化,保留移動目標信息。
3.2 三幀差改進算法
ViBe背景模型初始化時,如果第一幀中存在移動物體,則檢測結果中存在“鬼影”區域。本文使用三幀差算法提取動目標信息,彌補ViBe算法背景初始時不能存在目標的不足,進一步去除“鬼影”導致的虛警像素點。三幀差具體步驟如下:
首先,提取BP成像后相鄰的三幀圖像Ii-1,Ii,Ii+1(i為當前幀),計算幀間方差d(i,i-1)(x,y),d(i,i+1)(x,y):
d(i,i-1)(x,y)=|Ii(x,y)-Ii-1(x,y)|
(8)
d(i,i+1)(x,y)=|Ii+1(x,y)-Ii(x,y)|
(9)
然后,設置閾值T將d(i,i-1)(x,y),d(i,i+1)(x,y)二值化,得到二值圖像b(i,i-1)(x,y)和b(i,i+1)(x,y):
(10)
(11)
將b(i,i-1)(x,y),b(i,i+1)(x,y)進行邏輯與操作。得到二值圖像D2i(x,y),公式如下:
D2i(x,y)=
(12)
二值圖像D2i(x,y)即為三幀差圖像。圖像中可以較清楚地觀測到動目標信息,但由于目標在幀間的移動,圖像中會出現“真空”現象。為了消除“真空”現象,通過形態學方法處理D2i(x,y),即使用3×3矩陣對圖像進行腐蝕操作,然后用3×3膨脹填充“真空”小孔。
為了結合動態閾值ViBe和三幀差的優勢,將動態閾值處理得到的二值圖像D1i(x,y)和三幀差處理得到的二值圖像D2i(x,y)進行邏輯“與”操作處理,得到圖像Di(x,y)。公式如下:

(13)
圖像Di(x,y)中,消除了“鬼影”像素點,動目標信息都可以較好地保留下來。
3.3 連通域判定
經過上述操作后,發現圖像Di(x,y)中還存在一些孤立的噪點。本文采用連通域的思想去除孤立噪點。判斷每個像素和其他像素在上、下、左、右、左上角、左下角、右上角或右下角是否連通,如果連通,則判斷為目標;如果不連通,則判斷為孤立噪點。連通域判定法處理后,Di(x,y)圖像上只存在動目標像素。
3.4 改進算法流程
本文提出的動目標檢測改進方法首先將原始回波數據進行BP成像,形成幀序列,然后將待測幀分別進行改進ViBe建模和像素分割,并采用三幀差提取動目標像素,處理結果通過連通域判定操作,得到動目標二值化圖像,在圖像中可以直觀地觀測動目標信息。算法總體流程圖如圖2所示。

圖2 本文運動目標檢測算法的流程圖
4 仿真與實驗結果分析
4.1 模擬仿真結果分析
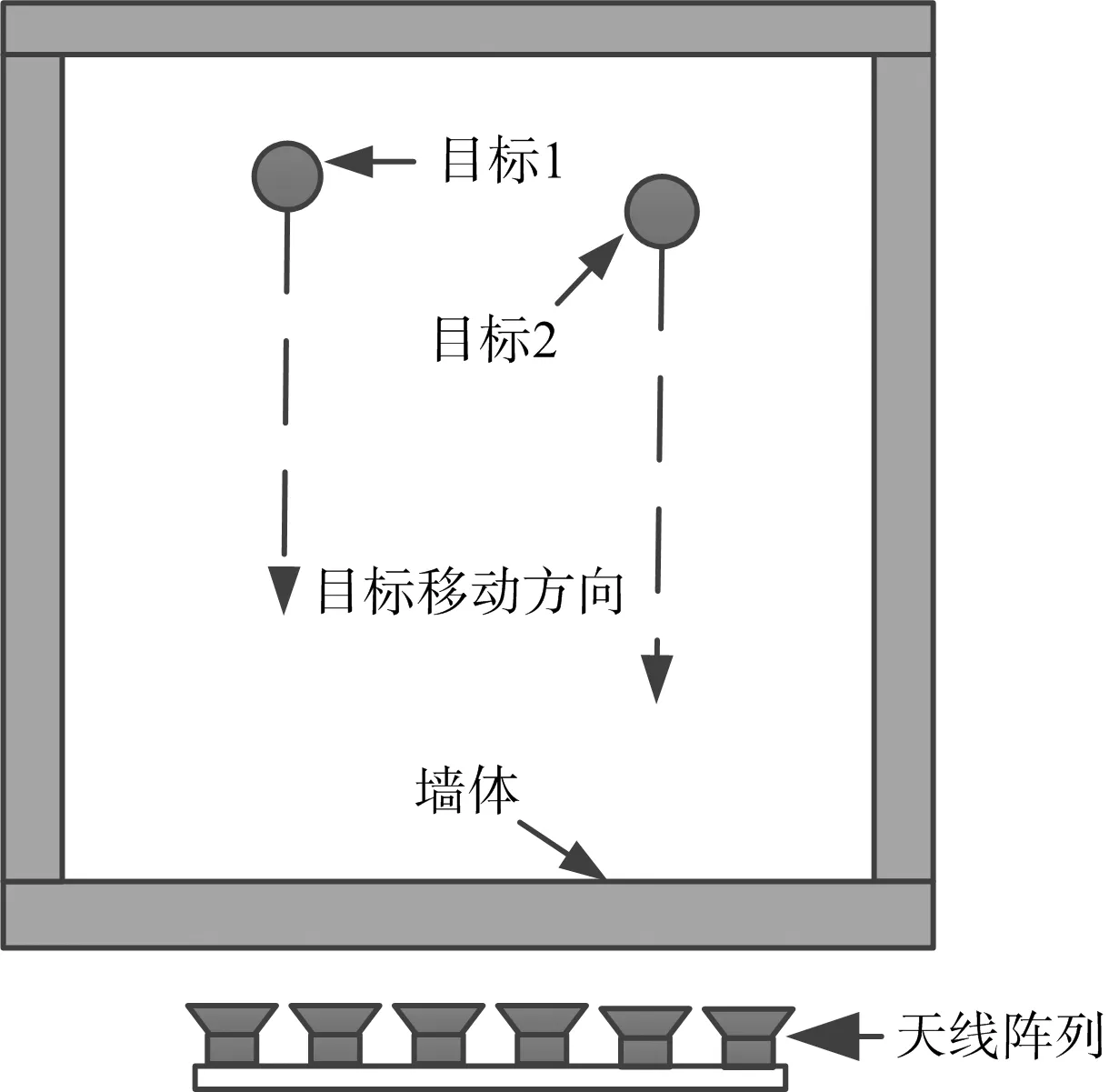
采用基于GPRMAX仿真數據驗證本文動目標檢測算法的性能。圖3為仿真采用的室內場景。房間的尺寸為LX=LZ=470 cm,兩個長1 m、厚0.1 m的內墻在距離前墻2.2 m處,墻厚度TH=0.1 m,房間墻壁是混凝土結構,相對介電常數ε=4.5,電導率σ=0.005 S/m。天線陣列長度L=4 m,距離前墻為h=1 m,有N=16個天線單元,單元之間的間隔d=0.3 m,每個天線輻射中心頻率為1 GHz的高斯脈沖波,在快速時間窗tre=60 ns內收集穿墻雷達回波。從第1幀到第10幀,目標1的坐標分別為(3.8,3.8),(4.1,4.1),(4.4,4.4),(4.7,4.7),(5.0,5.0),(5.3,5.3),(5.6,5.6),(5.9,5.9),(6.2,6.2),(6.5,6.5);目標2的坐標分別為(6.0,3.3),(5.7,3.6),(5.4,3.9),(5.1,4.2),(4.8,4.5),(4.5,4.8),(4.2,5.1),(3.9,5.4),(3.6,5.7),(3.3,6.0),軌跡如圖3所示。
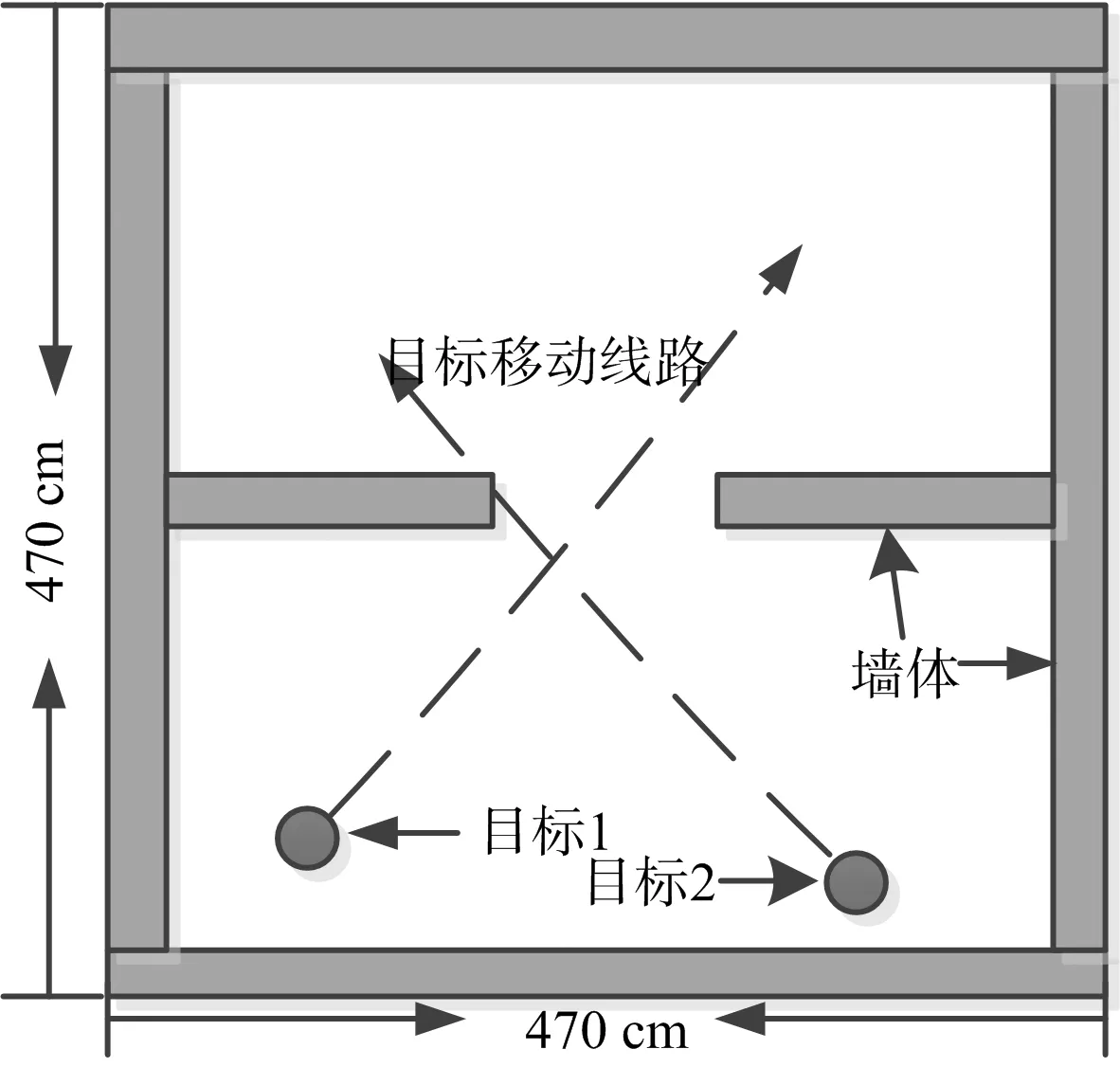
圖3 GPRMAX仿真的室內多目標場景
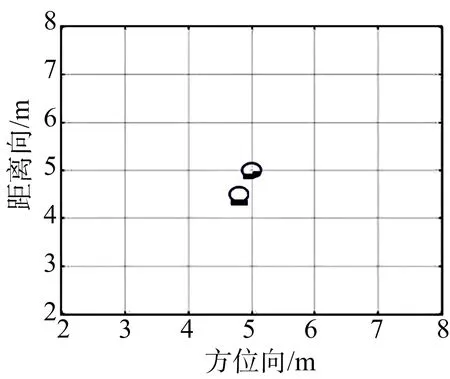
圖4為第5幀BP處理后的圖像,黑圓為目標實際位置,由圖可知,除了真實目標,還有大量由墻體反射、天線耦合造成的背景噪聲。
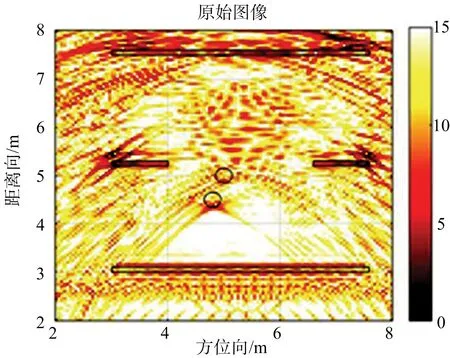
圖4 第5幀BP成像效果圖
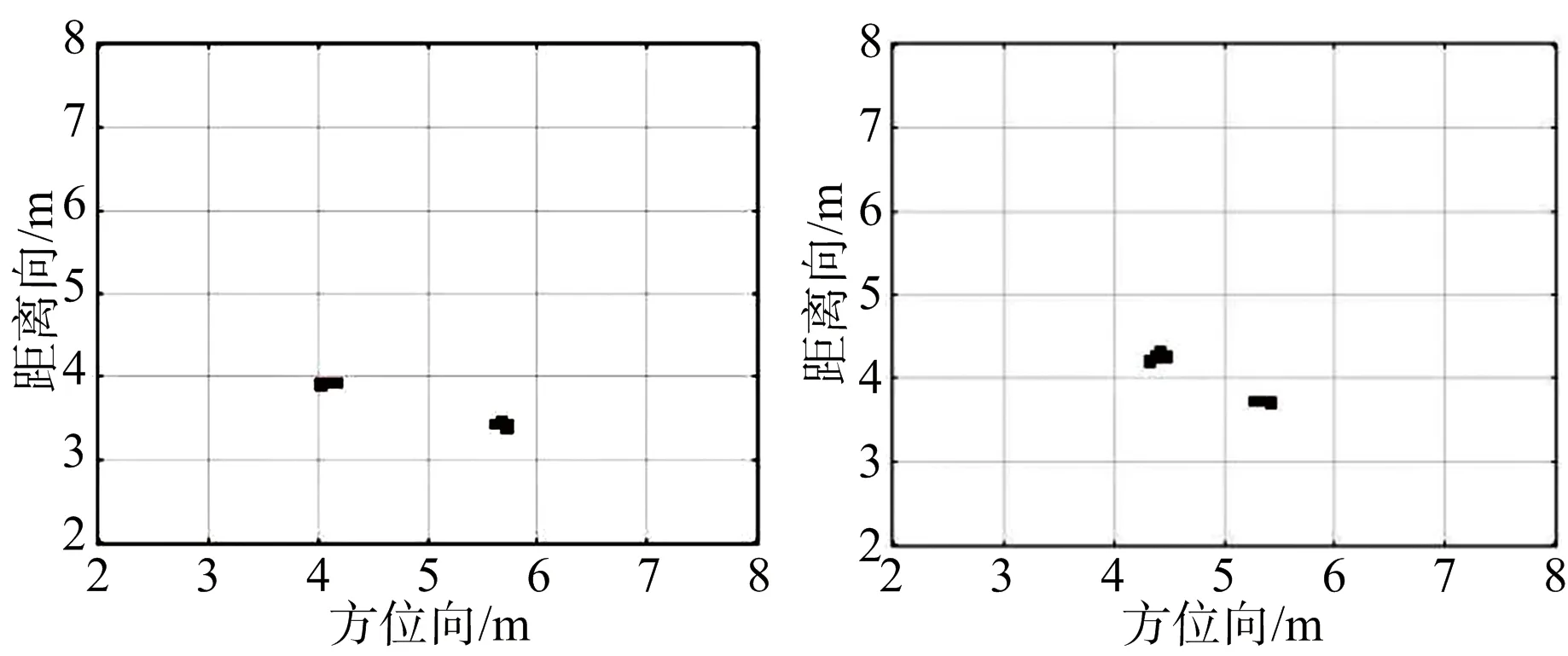
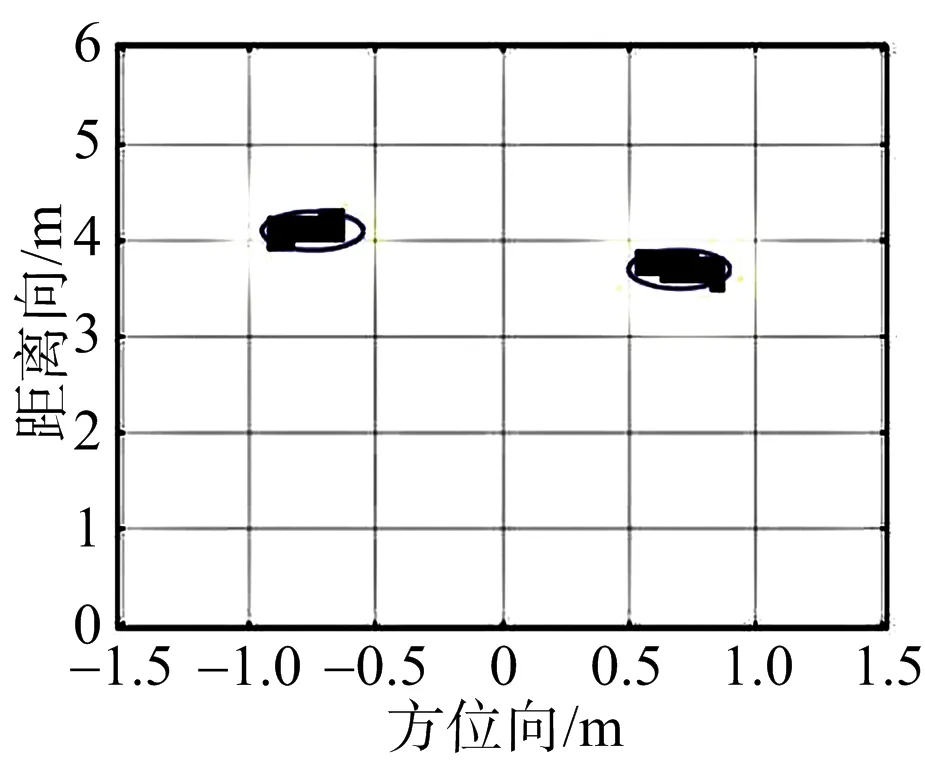
圖5對第5幀分別采用了CA-CFAR檢測(如圖5(a)所示)、OS-CFAR檢測(如圖5(b)所示)以及本文檢測算法(如圖5(c)所示)處理,并對3種檢測算法進行了比較。圖中圓圈處為實際目標位置,黑色斑點為算法檢測出的目標位置。由圖可知,CA-CFAR檢測的圖像中目標周圍存在大量虛警,不利于提取目標信息;OS-CFAR檢測后,目標周圍的虛警像素雖然清除,但是對強雜波引起的虛警的處理效果并不理想;本文檢測算法消除目標周圍的虛警,并且較好地保留了目標信息。

(c) 第5幀本文檢測算法圖5 基于第5幀圖像使用不同檢測算法所得二值圖
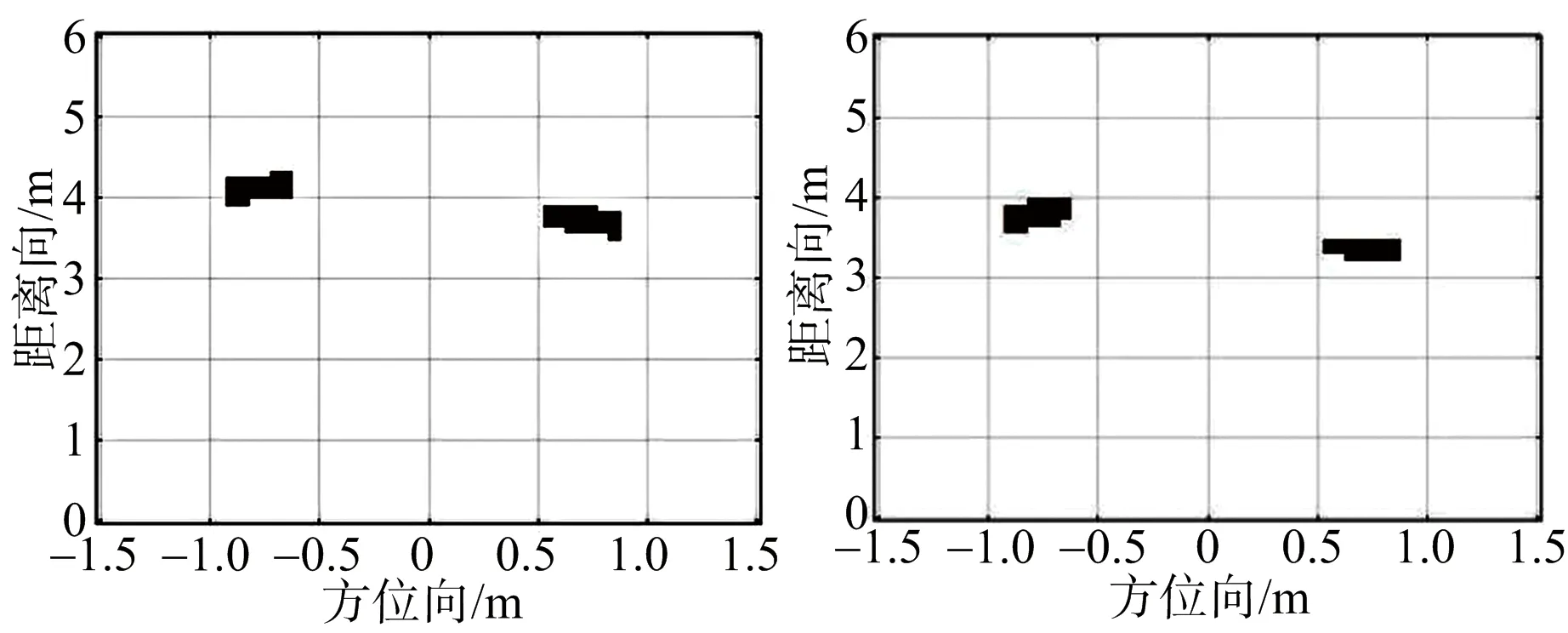
圖6為采用本文算法處理第2幀到第9幀的輸出結果,圖中只有動目標像素。綜上所述,本文算法不僅消除了室內環境造成的虛警現象,而且對移動目標檢測具有較高的穩定性。為了更加客觀地評價算法的檢測性能,將計算每個檢測結果的虛警率(False Alarm Rate,FAR)和均方根誤差(Root-Mean-Square Error,RMSE)。FAR為雜波區域像素個數的比值與整個區域像素個數的比值,FAR值越小,說明背景噪聲造成的虛警像素越少。RMSE為測量目標位置與真實目標位置的均方根誤差,RMSE值越小,說明檢測出目標的位置越準確。從表1可知,CA-CFAR,OS-CFAR檢測算法的FAR值較大,虛警較嚴重,對目標信息提取影響較大;而本文的FAR值和RMSE值均小于上述兩種算法,消除了虛警現象,較精確地保留了目標的位置信息。
(a) 第2幀 (b) 第3幀
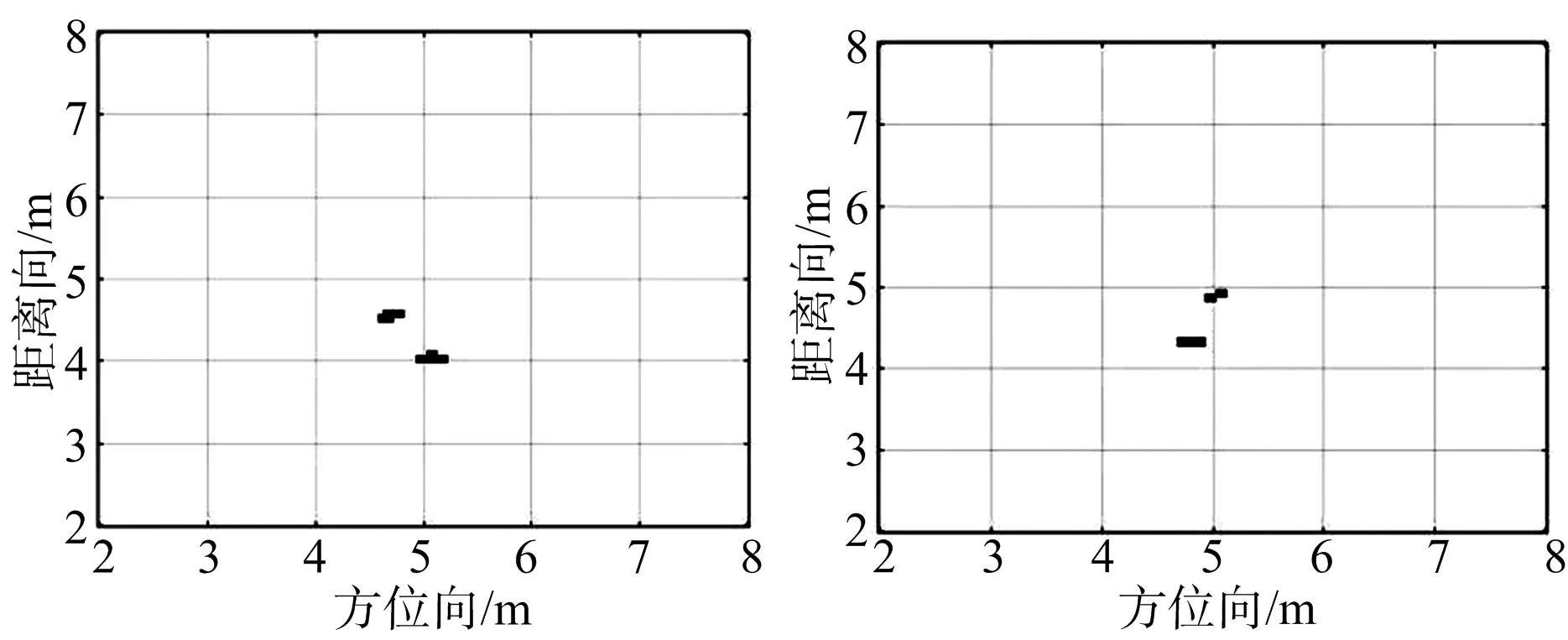
(c) 第4幀 (d) 第5幀
(e) 第6幀 (f) 第7幀
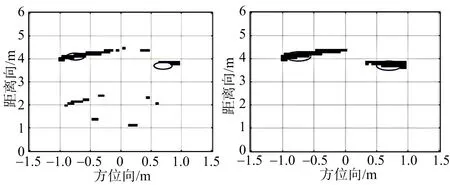
(g) 第8幀 (h) 第9幀圖6 數據幀檢測輸出結果
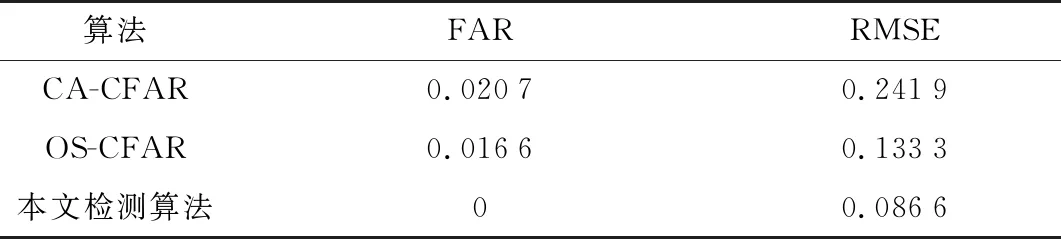
算法FARRMSECA-CFAR0.02070.2419OS-CFAR0.01660.1333本文檢測算法00.0866
4.2 實測結果分析
為了進一步驗證本文算法在實際場景中的性能,使用了穿墻雷達系統對房間內兩個移動人體收集回波數據,實驗場景如圖7所示。雷達系統由矢量網絡分析儀器和天線陣列搭建(如圖7(b)所示)。天線單元共6個,間隔為27 cm。矢量網絡分析儀工作頻率為1~2 GHz,起始頻率為1 GHz,頻率步進為5 MHz,雷達系統放置在離墻10 cm處。兩個人體目標在房間內直線移動(如圖7(c)所示)。
(a) 實測場景示意圖

圖7 實測場景
(a) 第2幀CA-CFAR檢測 (b) 第2幀OS-CFAR檢測
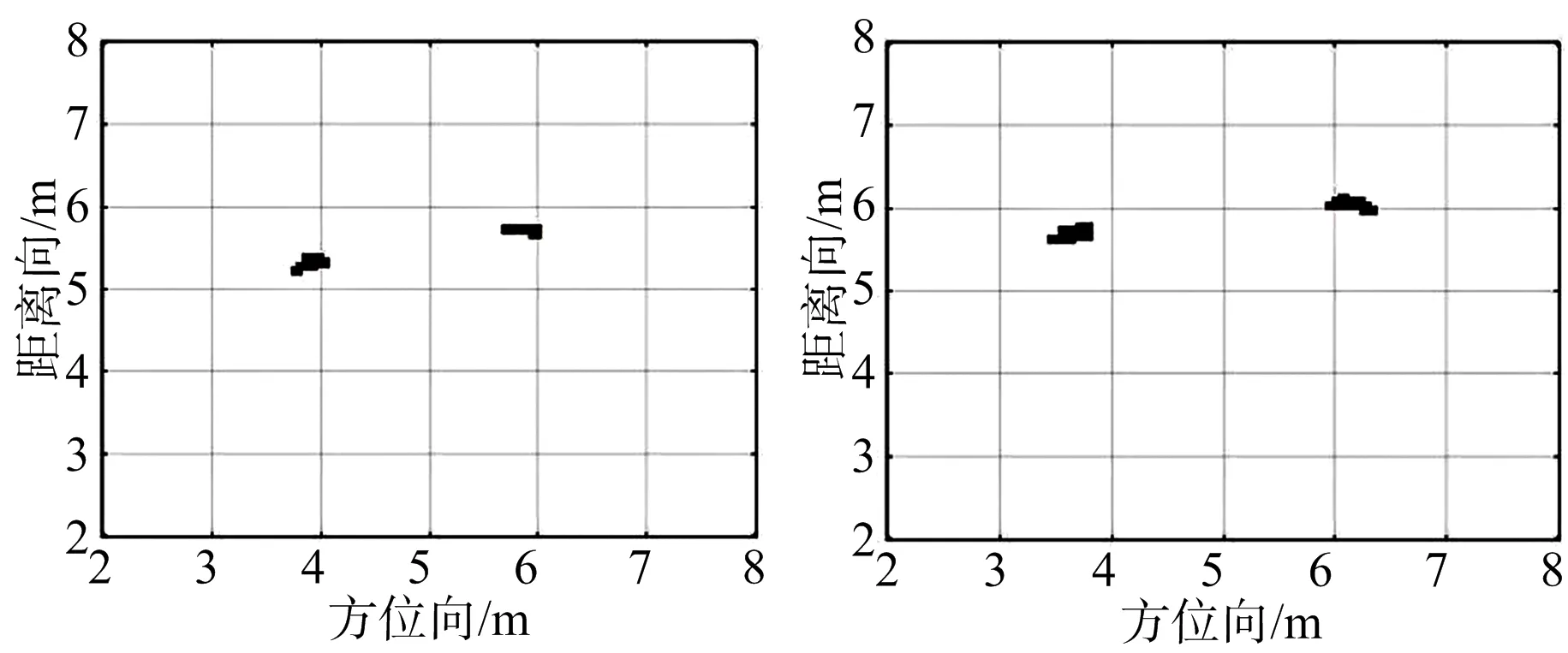
(c) 第2幀本文檢測算法圖8 基于第2幀圖像使用不同檢測算法所得二值圖
圖8為分別采用CA-CFAR檢測(如圖8(a)所示)、OS-CFAR檢測(如圖8(b)所示)以及本文檢測算法(如圖8(c)所示)三種算法處理雷達圖像的第2幀。由圖可知,CA-CFAR檢測的圖像中存在大量虛警,不利于提取目標信息,同時,由于目標旁瓣較大引起了拖尾現象;OS-CFAR檢測后,目標周圍的虛警像素點雖然被清除,但是對目標旁瓣較大的處理效果并不理想;本文檢測算法消除目標周圍的虛警,并且較好地保留了目標信息。
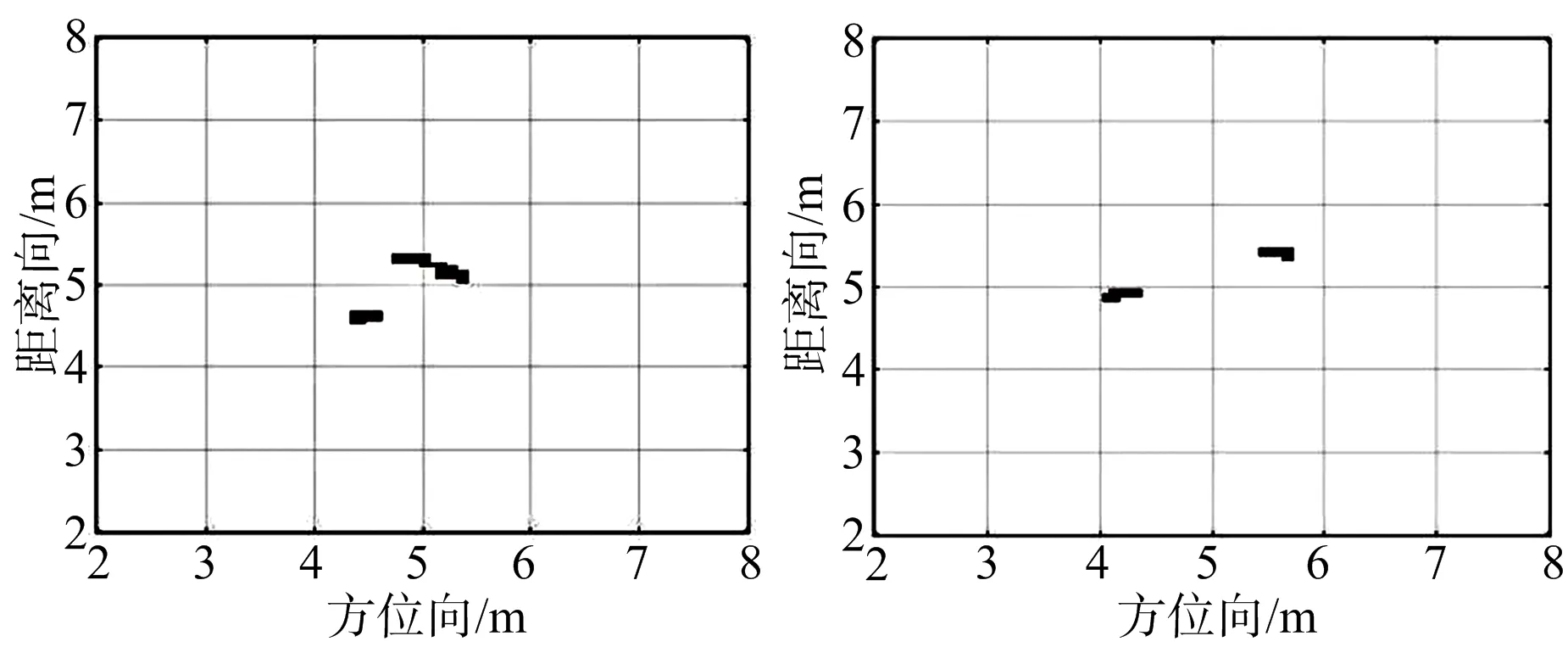
圖9為采用本文算法處理實測數據中第2幀到第7幀的輸出結果,圖中成功檢測出移動目標。上述實驗驗證了仿真實驗中得出的結論。本文算法不僅消除了室內環境造成的虛警現象,而且對移動目標檢測具有較高的穩定性。表2客觀表明CA-CFAR,OS-CFAR檢測算法的FAR值較大,虛警較多,對目標信息提取影響較大;而本文的FAR值和RMSE值均小于上述兩種算法,消除了虛警現象,較精確地保留了目標的位置信息。
(a) 第2幀 (b) 第3幀
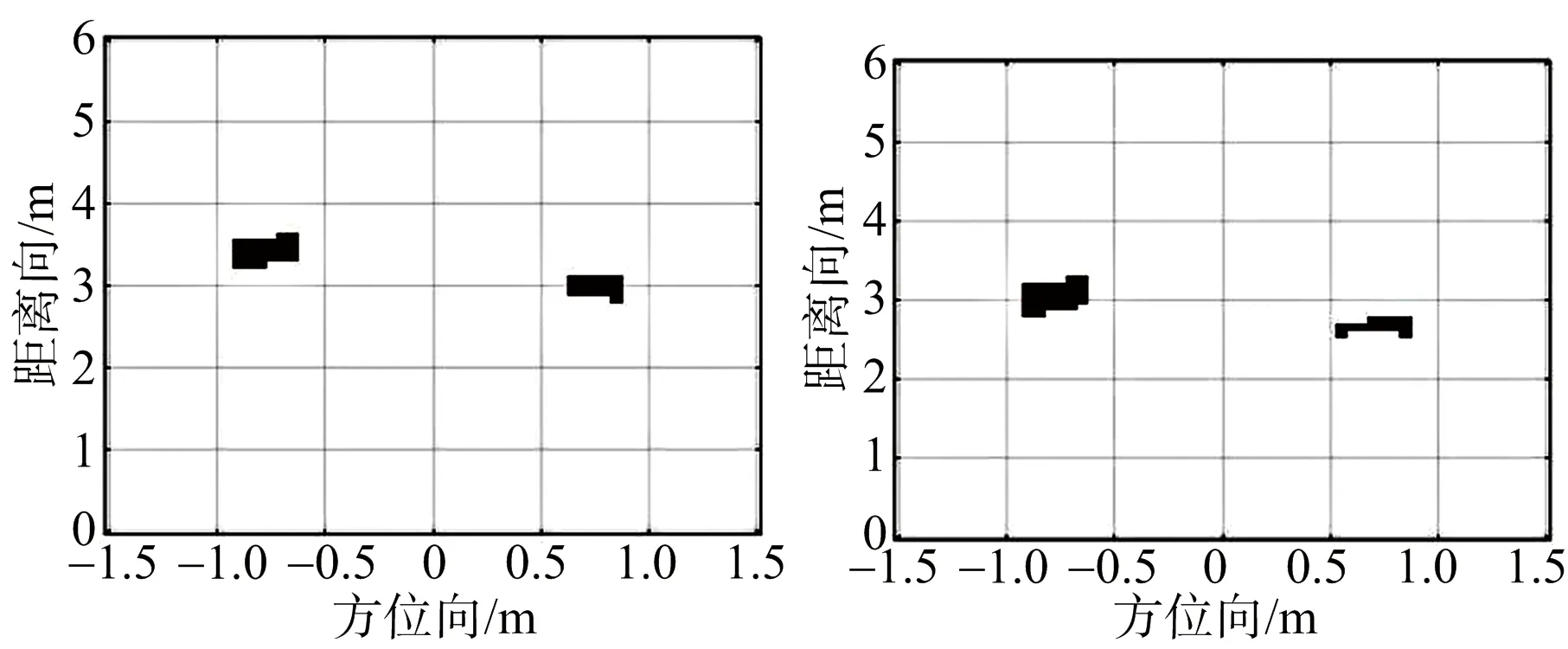
(c) 第4幀 (d) 第5幀
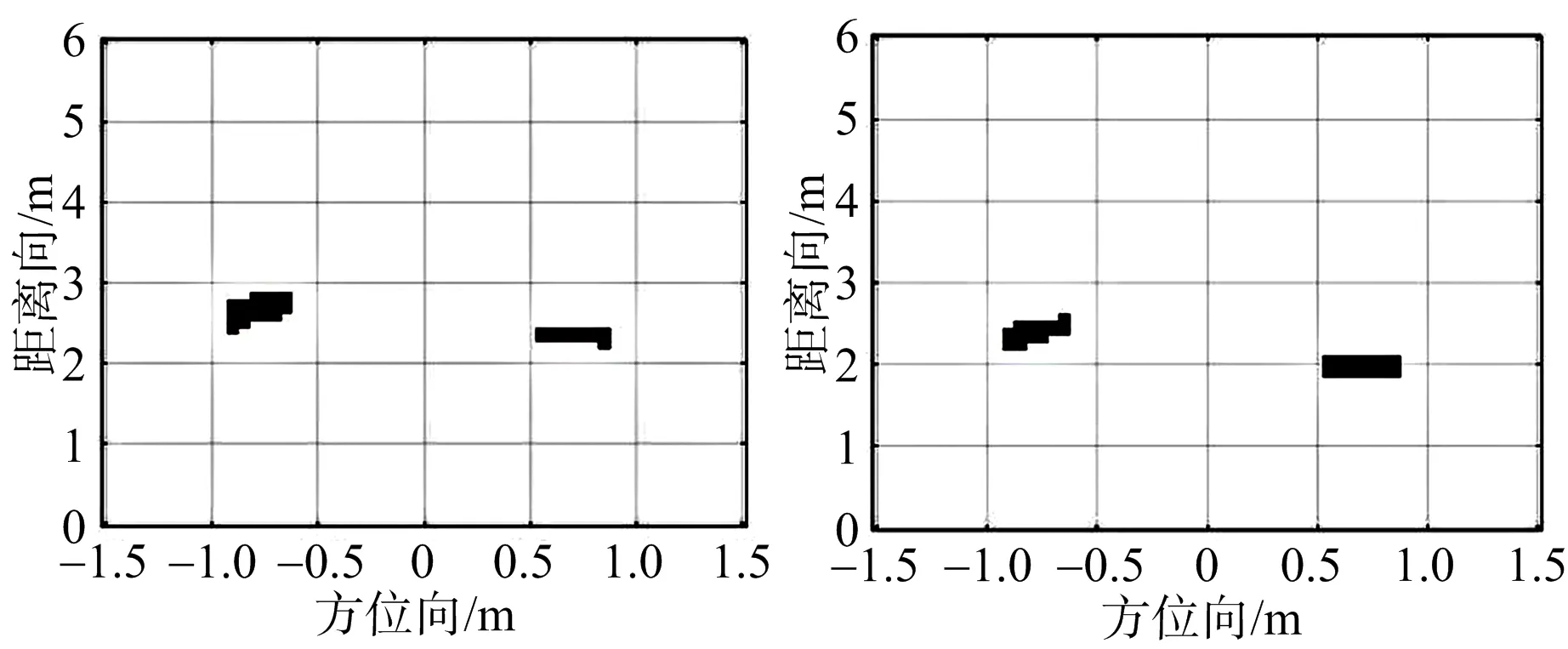
(e) 第6幀 (f) 第7幀圖9 實測數據幀檢測輸出結果
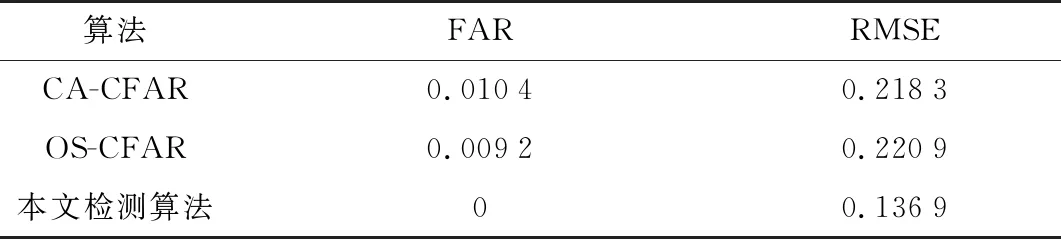
算法FARRMSECA-CFAR0.01040.2183OS-CFAR0.00920.2209本文檢測算法00.1369
5 結束語
本文提出的穿墻雷達信號動目標檢測的動態閾值ViBe算法,通過結合改進的動態閾值ViBe檢測算法、三幀差和保留連通域的方法,使其能實時地適應穿墻雷達圖像動目標像素值變化問題,消除目標周圍的虛警。仿真數據驗證和實測試驗結果表明該方法的有效性,能充分利用動目標的運動屬性,有效克服墻體雜波、耦合信號和噪聲,提取動目標信息。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48