基于機器視覺系統的智能化驗機器人設計與分析
2019-09-09 08:14:53張文博鄭溟天李杰
數碼世界 2019年5期
張文博 鄭溟天 李杰

摘要:本文主要研究了一種用于水質化驗的視覺SCARA機器人,并闡述了整個化驗機器人的結構及手眼標定,視覺識別的模型構建與實驗。在進一步完善以后,使智能化驗機器人可以在水質檢測工作中發揮重要作用。
關鍵詞:電動抓手 手眼標定 邊緣檢測
1 引言
隨著我國的發展,污水處理行業已然作為國家新興戰略產業之一——節能環保產業中的重要內容受到廣泛關注,國家“十三五”規劃也對城鎮污水處理提出更高要求,并明確要求縣級鎮、尤其是重點鎮必須建立污水處理廠。在智慧水務和無人管控概念的提出后,污水處理廠也開始走向無人化運營體系。由此,本作品旨在設計一種應用于污水處理廠,包括完全取代人工,完成對每日水指標化驗分析的機器人。
2 研究內容
針對污水處理工藝流程、水質化驗工作流程、化驗工作人員投入等方面調研。發現現在急需研發一套不需人員操作,能夠實現自主化驗的智能系統,取代人工化驗,提升化驗精度,實現精細化管理的同時減少人員投入成本。
(1)實現進、出水口24小時混合樣的檢測;
(2)能夠實現總磷、總氮、氨氮、COD水質指標的檢測;
(3)進、出水口總磷、總氮、氨氮、COD每日檢測一次;
(4)檢測數據能夠實時備份及上傳信息中心;
(5)具有自動上樣、消解、測定、移出功能;
3 設計方案
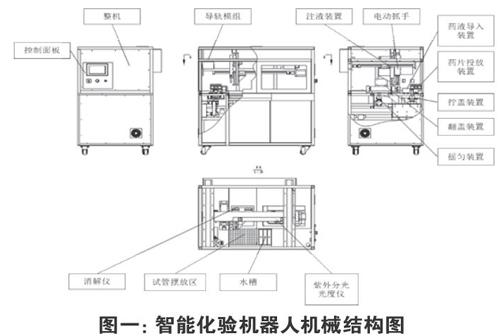
根據美國水質監測檢測系統DR6000設計方案,結合我國國家水質監測相關條例設計化驗機器人。整體機械結構如圖一:
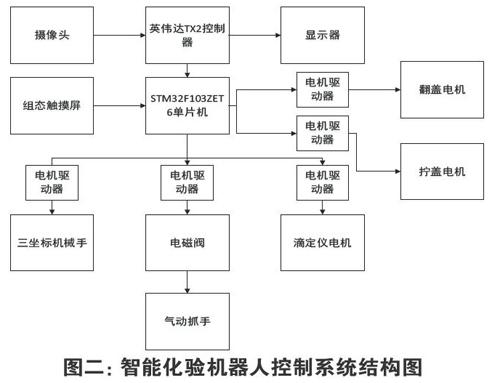
機器人系統需求主要有:三坐標機械手運動定位;藥劑試管定位;滴定試劑的量;翻轉蓋子的控制;監測數據的保存通信設備的穩定性擰蓋系統的配合。
控制程序流程圖如圖二所示
3.1 智能化驗機器人系統功能:
智能檢測水質化驗機器人可根據不同的檢測指標完成不同的檢測步驟,在檢測過程中,安裝在導軌模組上的電動抓手抓取藥品試管放在開蓋裝置工位處并將瓶蓋取下,注液裝置吸取調配好的水樣,注入試管中,之后,該裝置系統可根據具體實驗步驟需求可完成如下動作(各檢測動作可根據具體化驗步驟調整):取下蓋的試管移動到投放藥品裝置下,接受從該裝置中掉下的藥片,也可移動到藥液導人裝置下,接受從該裝置中導人的藥液;加入藥品后的試樣,可重新旋上蓋子,并由電動抓手送到搖勻裝置處,將藥品充分搖勻;檢測過程中,有時也需要根據具體操作步驟,將密封在試管蓋上端的藥品混合人試樣中,此時就需要利用翻蓋倒置將蓋子倒置并重新擰在試管上,之后送人搖勻裝置中搖勻:當試管需要加熱時,利用電動抓手將試管放入消解儀中,加熱到指定溫度,并取出,放在試管擺放區降溫;最后,將試管放入紫外分光光度儀中,該儀器可根據試管上的條形碼,完成不同檢測指標的檢測。可根據紫外分光光度儀獲得最后的檢測指標,并上傳給電腦,完成數據的傳輸、存儲。
3.2 機器視覺系統設計:
利用工業機器人手眼標定對機械手進行定位。想要達到對機械手位置坐標的高精度視覺定位,就需要保證對模型的高精度標定。通過建模,我們可以將化驗機器人的手眼標定問題轉化為求解AX-XB方程的問題。其中AA為機器人末端連桿坐標架在機器人攝像機系統移動前后的轉換關系,B為攝像機坐標架在移動前后的相對關系。為唯一確定手眼矩陣的各分量,至少需要旋轉軸不平行的兩組運動。由于在觀測中一般存在噪聲,因此在實際測量中一般需要多組運動來求解該方程。
因此為確定手眼矩陣的各個分量需要旋轉軸不平行的兩組運動,為避免運動中,因觀測噪聲影響精度,一般用多組運動來求解該方程。
假設有多組觀測值“AI,B1),(A2,B2),,(Ak,Bk)},求解AX_XB方程可以轉化為如下問題。
d表示在歐式群上的距離測度,最后通過李群理論知識將該最小化問題轉化為最小二乘擬合問題,可以得到簡單明確解,實現化驗機器人手眼標定。
3.3 試管定位及識別系統設計
針對藥劑試管,我們通過攝像頭獲取圖像后,利用加權平均法將圖像轉為灰度圖,通過中值濾波器消除孤立的噪聲點,它既能去除噪聲又能很好的保護圖像邊緣,然后利用Sobel算子檢測試管的邊緣,利用相關系數算法進行預存模板匹配進行試管識別,通過二值化及邊緣檢測進行試管管身條形碼的識別工作。
3.4 上位機軟件流程設計
化驗完成的數據可以通過XML文件自動入庫到頁面中展示,操作人員可以通過圖表和查詢功能對數據進行數據分析功能。可以直觀的看出是某幾項指標超標提醒化驗人員查看當天數據。化驗人員可以對其進行導出備份等操作。
4 結語
該智能化驗機器人在水務行業的應用具有以下優勢:
(1)高度的自動化程序,操作精準度高,各項化驗指標能嚴格按照標準方法實行檢測。
(2)工作效率高,化驗流程穩定且一致性高。大大提高了水質化驗數據準確性。
(3)解決化驗人員技術水平和積極性的問題,解決了化驗室人員管理問題,數據造假等問題。
(4)生產可復制性強,投入使用后更能減少大量人工成本投入,為企業增加效益。
我們的智能化驗機器人保證化驗數據的統一,為水務集團下~步實現實現長期、海量生產數據的智能專家輔助運營系統的搭建提供統一、完善的數據支持。
參考文獻
[1]何文斌,董國華,蔡瑾宇,等.污水處理廠遠程無人值守監控系統的研究與設計[J].工程技術,2016,7(12):202.
[2]王健強,程汀.SCA R A機器人結構設計及軌跡規劃算法[J],合肥工業大學學報(自然科學版),2008,31(7):1027-1041.
