工業(yè)機器人概率模糊支持向量機在線控制方法研究
2019-09-10 19:57:26徐淑瓊袁從貴
現代信息科技 2019年22期
徐淑瓊 袁從貴

摘? 要:本文針對工業(yè)機器人系統中存在的模糊信息和隨機信息,結合模糊支持向量機理論、概率處理方法和自適應調整機制,提出了工業(yè)機器人概率模糊支持向量機在線控制模型。實驗表明,該方法在保障快速性的同時,可以實現對模糊信息和隨機信息的統一處理機制,提高了機器人在線控制的魯棒性、跟蹤精度和快速性。
關鍵詞:概率模糊支持向量機;在線控制;工業(yè)機器人
中圖分類號:TP391.41? ? ? 文獻標識碼:A 文章編號:2096-4706(2019)22-0153-03
Abstract:Aiming at the fuzzy information and random information in the industrial robot system,combining with the theory of fuzzy support vector machine,probability processing method and self-adaptive adjustment mechanism,this paper proposes the online control model of the industrial robot probability fuzzy support vector machine. Experiments show that the method can realize the unified processing mechanism of fuzzy information and random information while ensuring the rapidity,and improve the robustness,tracking accuracy and rapidity of the robot online control.
Keywords:probabilistic fuzzy support vector machine;online control;industrial robot
0? 引? 言
工業(yè)機器人是由機械本體、控制器、伺服驅動系統和檢測傳感器裝置構成的一種能仿人操作、可自動控制、重復編程,并能在三維空間完成各種作業(yè)任務的機電一體化設備[1,2]。工業(yè)機器人廣泛應用于汽車及汽車零部件制造、機械加工、電子電氣制造、食品加工等等大規(guī)模生產企業(yè)中,成為具備柔性制造系統(FMS)、工廠自動化(FA)、計算機集成制造系統(CIMS)的先進自動化工具。
機器人控制技術是影響機器人系統性能的關鍵部分,已成為目前機器人領域研究的熱點和難點,許多問題有待解決。近年來,在線控制方法逐漸取代了傳統的運動控制方法。對于日趨復雜化的機器人在線控制問題、數據驅動,特別是以支持向量機[3-5]為核心的建模方法,已逐漸成為人們研究的熱點。這種模型利用非線性逼近能力,通過不斷的學習訓練,盡可能地逼近機器人在線控制的復雜過程。有的學者還提出了開放式多控制器的控制系統智能結構,將參數辨識與控制系統緊密結合,引入專家知識結構,有效學習選擇最佳控制方案以提高控制性能。這種類型的建模,對一些典型的機器人控制可得到較好的性能指標,但是仍然存在一些不足。現有的機器人在線控制技術都忽略了對系統中存在的模糊信息和隨機信息的綜合處理,以最大限度地提升機器人系統性能以及各個性能之間的折衷,建立了一套完整的工業(yè)機器人概率模糊支持向量機在線控制方法。
1? 工業(yè)機器人概率模糊支持向量機在線控制算法
工業(yè)機器人概率模糊支持向量機在線控制算法的設計包括了概率模糊支持向量機在線模型的結構設計、概率模糊支持向量機優(yōu)化等方面。
2? 實驗驗證
本文利用模糊理論,結合支持向量機提出了一種全新的概率模糊支持向量模型,并將其應用于工業(yè)機器人在線控制。下面給出工業(yè)機器人概率模糊支持向量機在線控制算法的實現步驟:
(1)工業(yè)機器人概率模糊支持向量機在線控制模型樣本集的建立:利用工業(yè)機器人已有的歷史數據,建立工業(yè)機器人概率模糊支持向量機在線控制模型訓練所需的數據集? 。
(2)概率模糊隸屬度P j的設計:在概率模糊支持向量機模型的設計中,關鍵是對概率模糊隸屬度的有效設計。在這里,我們可參考現有的模糊隸屬度函數的設計方法,對本文所提出的概率模糊支持向量機模型進行合理的設計,可參照參考文獻所涉及的方法[6]。
(3)工業(yè)機器人概率模糊支持向量機在線控制模型 的訓練:利用已建立的工業(yè)機器人概率模糊支持向量機在線控制模型的訓練集,同時結合設計好的概率模糊隸屬度,可對工業(yè)機器人概率模糊支持向量機在線控制模型進行訓練,得到工業(yè)機器人概率模糊支持向量機在線控制模型? 。
(4)工業(yè)機器人概率模糊支持向量機在線控制:利用已經訓練好的概率模糊支持向量機在線控制模型,可實現對工業(yè)機器人的在線控制。
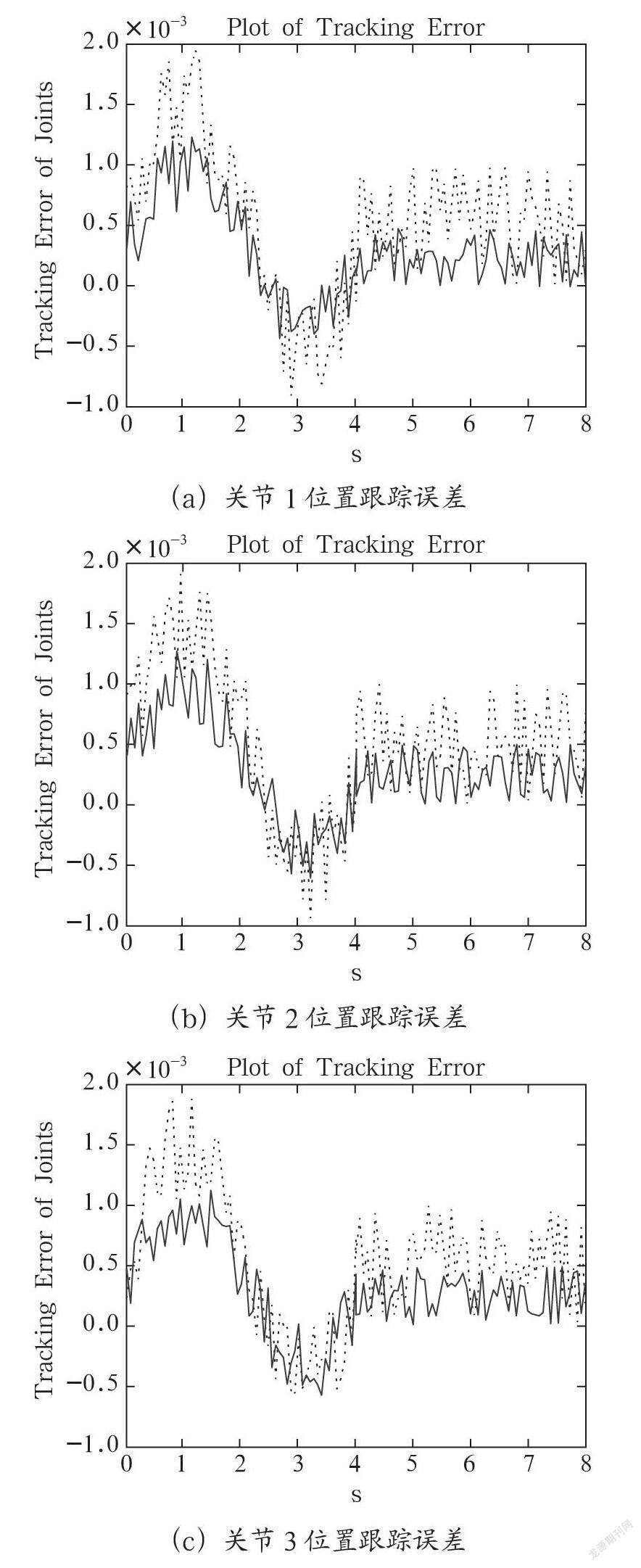
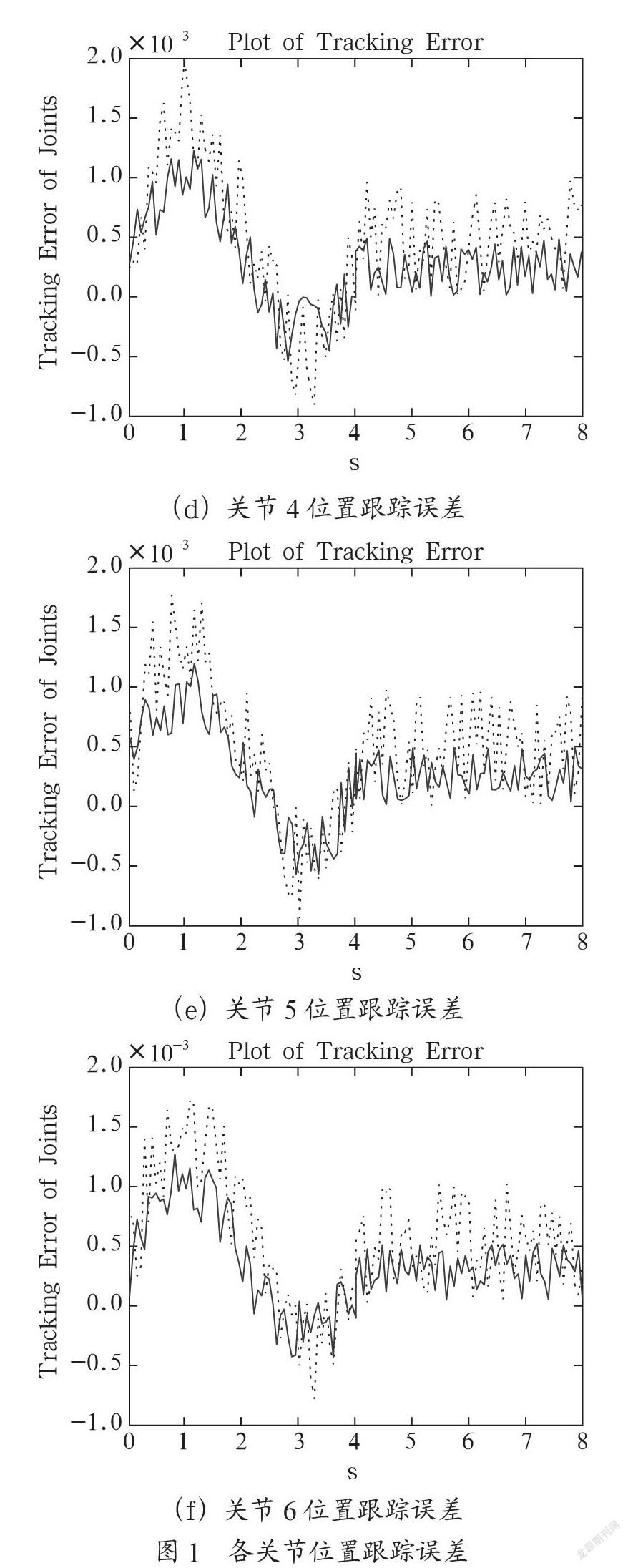
為驗證本文所提出的概率模糊支持向量機在線控制算法的有效性,我們將其與傳統的支持向量機方法進行比較,并對工業(yè)機器人的軌跡跟蹤性能進行測試,圖1給出了工業(yè)機器人對應六個關節(jié)(從第一關節(jié)至第六關節(jié))的軌跡運動位置跟蹤誤差。圖中虛線和實線分別對應傳統的支持向量機方法和概率模糊支持向量機方法的軌跡跟蹤誤差。
為驗證工業(yè)機器人的在線相應性能,盡量使各關節(jié)以較大的范圍工作,運動時間設定為8s,在保證起始點和終點速度,加速度連續(xù)的前提條件下進行關節(jié)空間的運動根軌跡規(guī)劃。圖1中所示,虛線和實線分別對應傳統支持向量機方法和概率模糊支持向量機方法的軌跡跟蹤誤差。我們可以看到,本文所提出的概率模糊支持向量機方法相比傳統支持向量機方法,得到了較好的結果。
3? 結? 論
本文結合模糊支持向量機理論、概率處理方法和自適應調整機制針對工業(yè)機器人系統中存在的模糊信息和隨機信息進行有效描述和處理,提出了工業(yè)機器人概率模糊支持向量機在線控制模型。再建立在線控制模型數據集,通過離線訓練好的模型用于在線的工業(yè)機器人控制,得到了較好的結果。實驗表明,該方法相比傳統支持向量機方法,能夠有效改善工業(yè)機器人在線軌跡跟蹤誤差。該方法也而可以進一步擴展到其他支持向量機方法中,應用于機器人控制、模式識別等領域。
參考文獻:
[1] 丁學恭.機器人控制研究 [M].杭州:浙江大學出版社,2006.
[2] 蔡自興.機器人學:第2版 [M].北京:清華大學出版社,2009.
[3] LIU Z,XU S,ZHANG Y,et al. Interval type-2 fuzzy kernel based support vector machine algorithm for scene classification of humanoid robot [J].Soft Computing,2014,18(3):589-606.
[4] XU S,LIU Z,ZHANG Y. Least Squares Support Vector Regression and Interval Type-2 Fuzzy Density Weight for Scene Denoising [J].Soft Computing,2016,20:1459-1470.
[5] 徐淑瓊,袁從貴.一種基于T2FPSO的type-2模糊支持向量機場景分類方法(英文) [J].系統仿真學報,2016,28(12):2925-2932+2938.
[6] LIU Z,XU S,CHEN C L P,et al. A Three-Domain Fuzzy Support Vector Regression for Image Denoising and Experimental Studies [J].IEEE Transactions on Cybernetics,2014,44(4):516-525.
作者簡介:徐淑瓊(1981.05-),女,漢族,廣東揭陽人,博士,副教授,研究方向:工業(yè)機器人控制,智能信息處理。