基于視覺定位的在線式機器人螺釘緊固模組應用
2019-09-10 06:01:36田升
現代信息科技 2019年16期



摘 ?要:傳統3C電子行業產品的裝配工藝一般都是離線批量式生產作業方式,但在目前產品快速迭代、型號種類繁多的大趨勢下,這種作業方式可能無法滿足生產需求。本文介紹了一種利用工業機器人為執行本體,搭載螺釘緊固組件和視覺定位系統的在線式工作模組為應用的新的自動化裝配解決方案。
關鍵詞:工業機器人;螺釘緊固;視覺定位;工作模組
中圖分類號:TP242;TP391.41 ? ? 文獻標識碼:A 文章編號:2096-4706(2019)16-0135-04
Abstract:The traditional 3C electronic products industry the assembly process is usually offline batch production operation way,but in the current rapid iteration model a wide variety of products under the big trend,this mode of operation may not be able to meet production requirements,the article introduces the use of industrial robots for execution of ontology,carrying screw fastening components and visual positioning system on-line work module for the application of a new automated assembly solutions.
Keywords:industrial robot;screw fastening;visual positioning;working module
0 ?引 ?言
最近十幾年,伴隨著全球經濟一體化進程的加速,“中國制造”已經在世界范圍內發揮著越來越重要的作用。但目前國內制造業普遍面臨人力成本不斷提高以及客戶對產品質量、交期不斷提高的要求帶來的壓力,許多企業開始通過導入自動化生產設備代替人工作業降低生產成本。在這種大背景下,機器視覺和工業機器人搭配的一種自動化解決方案在中國進入了一個快速發展期。很多的企業開始利用搭載機器視覺的工業機器人來代替手工生產作業。
機器視覺就是用機器替代人眼來完成觀測和判斷,常用于生產過程中的產品質量檢測和產品定位。工業機器人作為執行本體,其作用就是替代人的手完成產品的組裝。機器視覺定位技術和工業機器人的結合可以大大提高產品生產質量和效率,并且可以避免人眼視覺檢測帶來的偏差和人手工作業一致性差的問題。
本文介紹應用機器視覺定位技術和工業機器人相結合的生產方式在產品組裝工藝中應用的一種自動化解決方案,該方案利用六軸工業機器人、視覺定位系統、螺釘緊固模組、自動送螺釘機,自動化生產線等設備,構建了一個在線式工作模組。
1 ?基于視覺定位的在線式機器人螺釘緊固模組
1.1 ?工作模組介紹
該工作模組應用于基站天線整機組裝生產車間,主要由CMOS(complementary metal-oxide semiconductor)視覺定位系統、六軸工業機器人、螺釘緊固組件(含電批)、自動送螺釘機、多工序集合流水生產線組成。
天線底板在自動流水線的上一工序完成上料后固定在流水車上,然后流到底板螺釘緊固工序崗位,自動流水線檢測流水車運行到位后升降氣缸動作,將流水車抬升至六軸機器人作業高度后發送到位信號給兩臺六軸機器人,兩臺六軸機器人運動至底板螺釘孔位正上方后通過EtherNet/IP通訊協議將啟動拍照指令發給其頭部搭載的工業相機,相機拍照后將采集的圖片進行分析處理得出螺釘孔位中心相對于示教時的偏移值,然后圖像處理軟件將偏移值回傳給六軸機器人,六軸機器人將偏移值(X軸、Y軸、Z軸的旋轉角度)和示教位置數據相加后運行至目標位置,發出啟動信號給電批完成螺釘緊固工作后,發送請求送釘信號給自動送螺釘機完成螺釘送料,兩臺六軸機器人依次將天線底板中26個螺釘緊固完成后發出加工完成信號給到控制自動流水線的PLC,自動流水線收到加工完成信號后將升降氣缸復位,流水車下降到流水運行高度,待其他工位工序完成后整體往下流動,完成一個螺釘緊固工序的循環。整個工作模組放置在自動流水線旁邊,通過和線體的信號對接可在線對天線進行組裝,通過六軸機器人加視覺輔助定位的方式,天線底板孔位位置設計變更和每個流水車存在的機械偏差等問題都可以通過軟件調試的方法解決,避免產品設計變更帶來的傳統天線生產使用治具跟隨變更導致的治具加工周期時間浪費,從而實現天線整機自動化裝配工藝在線式生產。
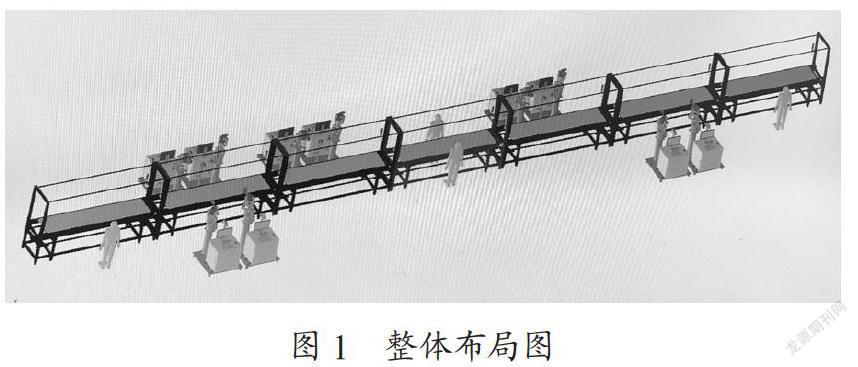
1.2 ?方案整體布局
方案整體布局如圖1所示,由兩臺ABB六軸機器人作為執行本體,利用六軸機器人自由度高、重復定位精度高、可自由編程的特點,采用視覺定位技術應對天線設計的變更頻繁和信號繁多,建立在線式的天線整機裝配生產作業平臺。
1.3 ?設備參數
工作模組的主要組件如表1所示。
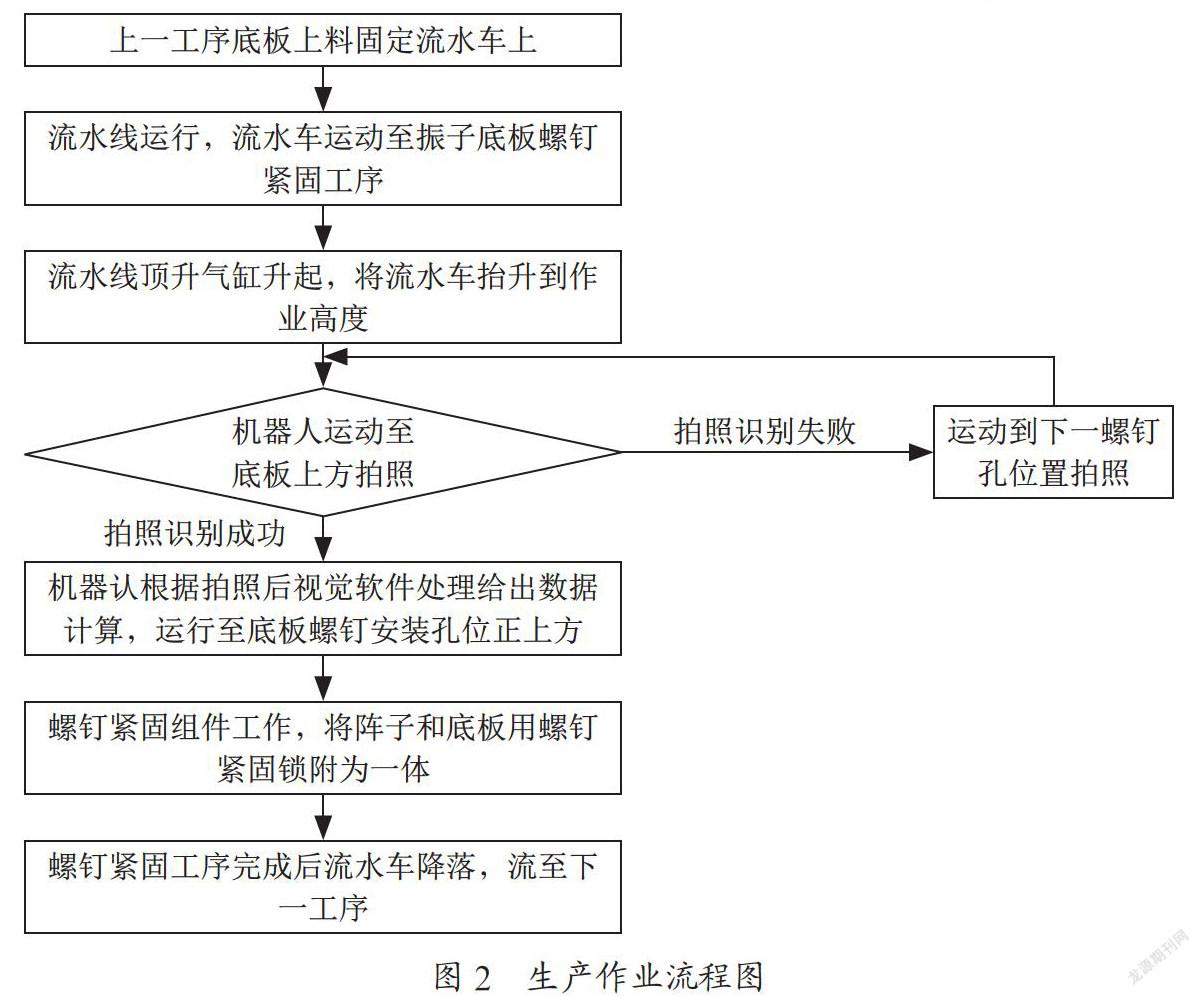
1.4 ?生產作業流程
生產作業流程圖如圖2所示。
2 ?模組構建實施
2.1 ?六軸機器人
2.1.1 ?六軸機器人選型
整個工作模組選用了兩臺ABB 1200六軸機器人作為執行本體工具端,搭載視覺定位相機和螺釘緊固組件,實現在線式裝配工藝,該六軸機器人負載為7kg,重復定位精度為±0.02mm,單臺工作范圍700mm,兩臺機器人協同工作便可覆蓋約2400mm的工作范圍,滿足大部分主流天線尺寸范圍。
2.1.2 ?兩臺機器人協同
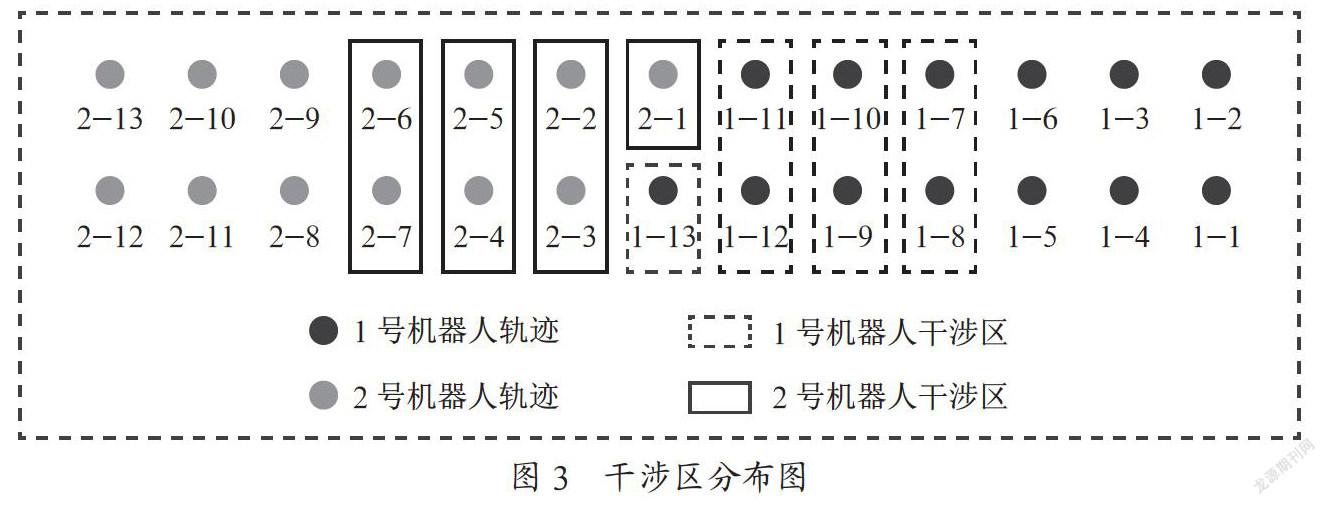
由于需要兩臺機器人協同完成對整副天線的螺釘裝配工作,兩臺機器人存在部分工作區域重疊干涉,如圖3所示。根據機器人工具端寬度情況,將干涉區分為八大塊,使用互鎖方式讓兩臺機器人在保證安全的前提下協同工作。
如圖3所示,當1號機器人需要進入1-7/1-8點位進行工作時,需要判斷2號機器人在哪個工作區域,如果2號機器人剛好在與其存在干涉的2-1點位時,會根據2號機器人發出的互鎖信號選擇等待,當2號機器人離開2-1工作區域時將1號機器人解鎖,允許其進入1-7/1-8點位進行工作。以此類推,兩臺機器人共設了4組互鎖信號,保障兩臺機器人在存在干涉的8個區域內安全地進行協同工作。
2.1.3 ?通訊接口
ABB 1200六軸機器人可實現與外部設備多種通訊協議的通信,這次方案主要采用DeviceNet通訊協議實現兩臺機器人之間通信,機器人作為客戶端采用EtherNet/IP通訊協議與視覺系統進行數據的傳輸交換。
2.2 ?視覺系統
2.2.1 ?硬件構成
視覺系統的硬件由Basler相機、Computer鏡頭、條形光源、工控機及圖像處理軟件構成,詳情如表2所示。
2.2.2 ?相機選型
相機的作用是將鏡頭聚焦于像平面的光線生成圖像。相機中最重要的組成部件是數字傳感器。數字傳感器主要有兩種技術類型:CCD(charge-coupled device)和CMOS,兩者主要是從芯片中讀出數據的方式即讀出機構不同。基于成本考慮,采用了成本更低的CMOS傳感技術的Basler相機、型號為acA2500-14gm。
2.2.3 ?鏡頭選型
鏡頭是一種光學設備,用于聚集光線在數字傳感器上成像。鏡頭的作用是產生銳利的圖像,以得到被測物的細節。由于鏡頭內部凸透鏡成像原理,鏡頭的焦距數據是最重要的參數,根據方案需求,被測物體表面到鏡頭之間的距離大約為130mm,最后選擇的是35mm焦距的Computer品牌鏡頭。
2.2.4 ?光源選型
機器視覺系統常見光源有白熾燈、氙燈、熒光燈、發光二極管(LED)。由于白熾燈發熱嚴重、壽命短,氙燈供電復雜且昂貴,熒光燈壽命短老化快、光譜分布不均勻,此三種光源類型都不能滿足工業要求,最后選擇壽命長、亮度易控制、光源功耗小、發熱少的LED光源,由于LED有較多優點,因此也是目前機器視覺中應用最多的一種光源。
LED是一種通電致發光的半導體,能產生類似單色光的非常窄的光譜的光。其發光亮度與通過二極管的電流有關。發出的光的顏色取決于所用半導體材料的成分,可以制成紅外光、可見光及近紫外光。
2.2.5 ?圖像處理軟件
圖像處理軟件是利用Basler的sdk與相機通信,視覺算法基于OpenCV庫、Halcon庫、自主開發的糾偏算法與模型以及TCP Server與兩臺機器人通信和傳輸數據。圖像處理軟件界面如圖4所示。
2.3 ?螺釘緊固組件及配套送料設備
由于天線底板振子裝配都是使用M4*8梅花耐落螺釘,扭矩要求15±2Kgf/cm,同時有電批帶力矩到位反饋、反轉控制等要求。經過選型后采用了JOFR電批(型號:JF-50S;轉速:400r/min;扭矩范圍:15~50Kgf/cm)輔以相應的機械結構完成螺釘緊固裝配動作。
螺釘供料設備具備快速自動上料功能,同時能與機器人進行信號交互。
2.4 ?自動流水線
自動流水線是以20個流水車作為天線產品的載體,在線體內依次流動,匹配各工序類分的工作模塊配線生產方式,以六軸機器人作為執行主體,配合必要的機械輔助、視覺精準定位的方式,進行產品的組裝生產。
3 ?結 ?論
綜上所述,基于視覺定位的在線式機器人螺釘緊固模組應用方案介紹,詳細解析了方案各組成部分,詳細分析了幾種重要設備的選型參數要求,為視覺定位系統與工業機器人相結合應用推廣提出一種新的解決方案。
參考文獻:
[1] [德]Carsten Steger,Markus Ulrch,Christian Wiedemann.機器視覺算法與應用 [M].楊少榮,吳迪靖,段德山譯.北京:清華大學出版社,2008.
[2] 葉暉,管小清.工業機器人實操與應用技巧 [M].北京:機械工業出版社,2010.
作者簡介:田升(1991.08-),男,漢族,江西贛州人,自動化工程師,研究方向:工業機器人應用。