基于行車安全與無人駕駛的線形優化
2019-09-10 12:13:29趙春長聞成維鄭暉
甘肅科技縱橫 2019年11期
趙春長 聞成維 鄭暉


【摘要】:經過研究發現,傳統的道路線形設計并不滿足汽車重心行駛軌跡的曲率變化率連續這一條件,繼而易引發駕駛員不舒適,嚴重的情況下甚至危及行車安全。為充分保證車輛在行駛時的安全感以及舒適性,并使道路線形更好的服務于無人駕駛技術,采用樣條函數曲線對道路線形進行擬合設計,使之滿足曲率變化率連續。本文介紹借助EICAD構建道路線形,采取擬合點坐標,利用origin進行線路擬合,分析誤差,論證擬合函數的可行性,得到擬合樣條曲線,使其與現有的道路設計模式相結合,來運用于無人駕駛汽車行駛路徑決策中。
【關鍵詞】:道路線形優化設計;車輛行駛軌跡;交通安全;樣條函數曲線;無人駕駛
中圖分類號:U412.3? ? ? 文獻標志碼:A
引言
當前世界正飛速發展,中國的城鎮現代化進程也不斷加快,道路交通系統在大部分地區的各個方面的發展都有著巨大的影響。而道路設計作為道路交通系統中的骨架自然起到了決定性的作用。新時代的道路不僅能連通兩個區域,還能容納相應的交通通行量、體現優美順暢的線性、具有行車指向性,除此之外,它還應與周邊環境相互協調、適應,符合時代可持續發展的理念,且對交通智能化的要求也進一步提高。現今無人駕駛技術也快速發展,當無人駕駛汽車行駛在彎道上時,要不斷地識取彎道上車道線等特征,對不規則的線形,汽車大腦系統也難以選擇出合適的路徑行駛,因而無人駕駛技術對道路的線形的要求也將會更高。
線形設計在道路設計和運營的整個過程中起著非常重要的作用,是其中最為核心的一部分。目前,我國道路仍然采用直線、緩和曲線、圓曲線等傳統的道路線形組合來進行道路線形設計。這種方法在路線設計過程中,道路和城市道路的路線會受到許多客觀因素的影響,如自然地理、社會經濟和技術條件等。[1]為使車輛行駛更加安全,并使道路線形更好服務于無人駕駛技術,有必要確保車輛的軌跡與道路的線形設計相匹配。因此,從這個角度出發來設計出一個良好的道路線形方案,使之確保線形具備更為合理的技術性和經濟性,且能運用于無人駕駛技術中。
1 道路線形現狀存在的問題
目前,城市道路和公路的主要服務對象是汽車,因此道路設計的主要依據是對汽車行駛規律的研究,而在道路平面設計過程中,主要考慮車輛的行駛軌跡。當道路線形設計與車輛的行駛軌跡一致時,能進一步滿足行車的安全與順暢,而在一些高等級道路的設計中對這方面的要求就顯得尤為重要。如果道路線形不滿足車輛行駛軌跡的幾何特點,將容易導致車內人員不舒適,甚至危及行車安全。
現階段研究表明,車輛在行駛中,其重心軌跡在幾何特性方面具有以下特征:
(1)軌跡是連續的、并且也是圓滑的;
(2)軌跡的曲率是連續的,即在軌跡上任何一點上都不會有兩個曲率值;
(3)軌跡的曲率變化率是連續的,即在軌跡上任意一點都不會有兩個曲率變化率值。[4]
以前的低等級公路平面線形大多采用直線和圓曲線組成,但其僅符合汽車行駛軌跡特性(1),達到了車輛轉向和直行的要求,但不滿足(2),兩個不同的曲率值出現在了直線和圓曲線的切點處。如今汽車數量的增多以及行駛速度的提高,引入了一條曲率變化連續的緩和曲線,來連接直線和圓曲線,使得整條線形符合了(1)、(2),但仍不符合(3),在緩和曲線與直線,圓曲線和緩和曲線的連接點上發生了曲率變化率突變。因此,當前需要一條滿足汽車行駛軌跡幾何特征的道路曲線,從線形上提高車輛行駛的安全性,并可以運用在無人駕駛技術中,提高無人駕駛汽車路徑決策的效率。
2 三次樣條函數曲線的引入
傳統的道路線形設計方法并不能完全符合車輛的行駛軌跡,從而易導致行車舒適安全等問題,無人駕駛技術雖然省去了駕駛員控制這個環節,但它對道路線形的要求也將更為嚴格。由向心力與車速及曲線半徑關系式知,當汽車在平曲線上行駛時,產生離心力的大小與曲線半徑成反比,與車速的平方成正比。由曲率與半徑的關系式可知,離心力與曲線的曲率有關。由于受到離心力的作用,當車速過快或者曲線曲率較大時,汽車會發生側向滑移或橫向傾覆。當車速不變時,曲率越大離心力越大。因此需在一些曲率突變的平曲線路段上改用樣條函數曲線,使曲率不產生突變。
樣條函數由多項式分段定義。因為樣條構造簡單,擬合準確,能近似擬合曲線和交互式曲線設計中復雜的形狀。從物理上講,樣條曲線滿足型值點的約束,同時使勢能達到最小。從數學上講,當選取為三次樣條函數,這樣確定的樣條曲線具有連續的一階、二階導數。[4]因此,三次樣條函數曲線具有曲率變化率這一性質。樣條曲線擬合通常采用選取擬合點坐標形式,比較符合道路平面線形布設的實際操作,不僅使道路線形設計工作在沒有一些必要數據的情況下能照常使用,而且曲線布設工作也變得比較容易,[5]便于設計人員實際操作。故可采取三次樣條曲線來設計彎道線形,達到線形能夠符合車輛重心行駛軌跡幾何特征的要求。
3 樣條函數曲線與一般道路曲線對比
3.1樣條函數擬合曲線
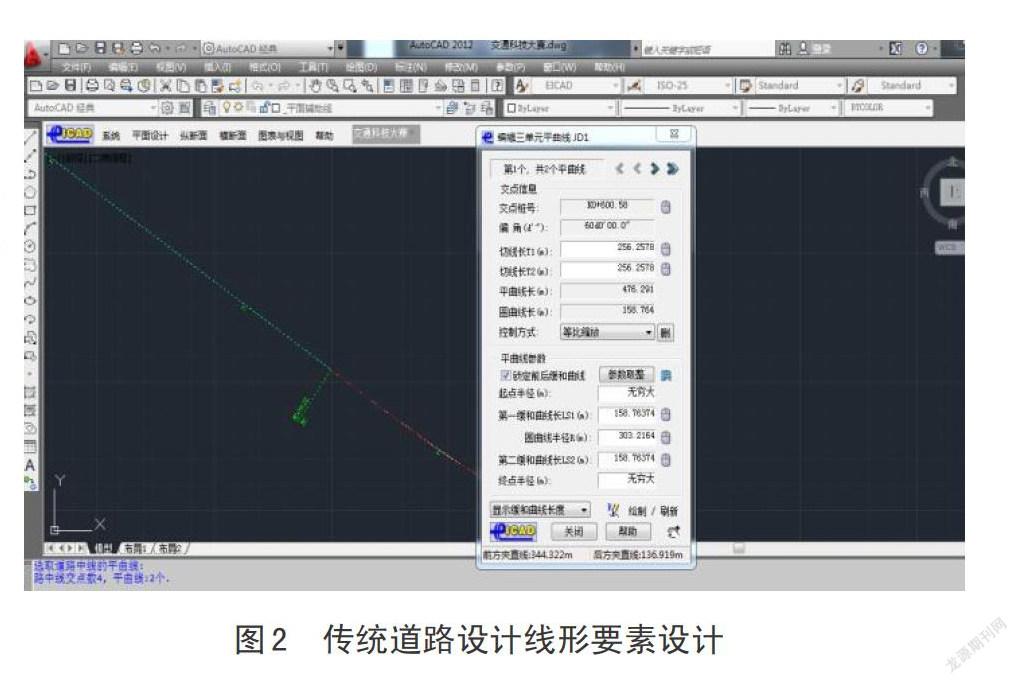
根據現有的資料,利用EICAD進行傳統的道路線形設計,得到圓曲線半徑為303.2164m,緩和曲線長度為 158.7637m,此時切線長為256.2578m, 圓曲線長度為158.764m,平曲線長度為476.291m.此時整個道路線形基本符合規范[5],如使緩和曲線長度與圓曲線長度之比約為1:2:1。在此基礎上,進行逐樁標注,然后進行逐樁坐標的輸出,此過程均可在EICAD中借助此軟件進行。整理前面所得到的逐樁坐標表為電子表格的形式,然后輸入origin軟件中進行樣條曲線的擬合,通過調整函數模板,根據得到的函數圖像與現有的道路線形圖坐標進行對比分析。
我們得出當擬合函數模板為樣條函數時,其擬合度最高。因此我們將采用樣條函數的擬合曲線與原有線形進行分析比較,得到函數誤差值分析和函數參數指標分析兩張表以及擬合后的曲線圖。
3.2擬合曲線數值分析
origin擬合得到的公式為
其具有二階連續導數,所以運用這個擬合函數所構建的平面線形與車輛行駛軌跡相接近,保證了行車順暢與安全。當將這個擬合函數繪制到原先的路線圖上,發現曲線走向比原來的更加具有連續性,且總體線路誤差不大,20cm的范圍上下浮動。
3.3對比結果
綜上數據分析所得,樣條函數擬合所得的曲線線形整體與原道路線形相似,但是在相差較大點處,距離上的差距還是很客觀的。這些距離用于調整線路與道路環境的協調性我們認為是很富裕的。
在山區公路線形布設過程中,即使在地形、地物的嚴格限制條件下,樣條函數擬合曲線卻可以更好的結合實際地形進行道路設計,而且每個區間之內還可以增加更多的節點,這樣,就能夠得到精確度更高的擬合曲線,與道路環境的適應性更加完善。
具體來說,我們的方法是根據路線布設過程中的控制要求,采用樣條曲線擬合以此來保證曲線上每一個點的曲率變化率是連續的,在已有的路線設計基礎上,進行路線優化設計,最后繪制出來的平面線形具有布線平滑的特點,且可已知線形的函數式,這對于行車的安全具有保障作用。所以利用樣條曲線來代替傳統的線形組合進行設計,在匝道、山區等布設困難地方具有實際的運用價值,并且可根據已知線形函數,運用于無人駕駛技術中,使汽車做出合適的路徑選擇。
4道路樣條函數線形與無人駕駛的結合
4.1 現階段無人駕駛技術情況
未來無人駕駛技術的普及也需要更為優良的道路條件。現階段無人駕駛技術主要通過一系列的傳感器,攝像裝置對行駛環境進行感知,從而獲取信息傳給控制系統,進行道路信息分析[6]。而當無人駕駛汽車系統有了道路各路段線形的參數后,將能做出更好的調整,選擇最優路線進行行駛。
目前具有代表性的無人駕駛路徑軌跡規劃算法有:A*算法,DIJKATRA算法,RRT算法,智能群落算法等,但這些算法在無人駕駛方向的運用仍然存在很多的問題。例如,A*算法需要采用方格式環境操作,很難滿足路徑曲率平滑變化。智能群落算法的在線計算時間都偏長,求解速度較慢,難以滿足道路車輛運行的實際要求。[7-8]
4.2 設計方法
我們設想在道路設計階段就對道路線形進行優化設計,設計一條可以方便無人駕駛汽車行駛的專用道,這條線形具有滿足汽車行駛軌跡的特征。在道路線形設計階段中,在一些曲率變化率突變的路段就運用樣條函數曲線進行擬合設計,即選取大量擬合點,使三次樣條曲線經過這些點,從而獲得曲率變化率連續的道路線形。
軌跡的生成如下表達:
首先由曲率公式
式中:K——曲率
再根據汽車轉向運動學關系知
式中:——轉向角
——汽車軸距
從而可得轉向角
即已知了道路線形曲率和汽車軸距,從而實現彎道行駛轉向。在道路的設計階段我們就采用了三次樣條曲線設計進行線形設計,因此各路段曲率K值等數據即可已知,從而道路線形參數可錄入無人駕駛汽車大腦系統,汽車可以快速進行路徑決策,調整轉向角。
4.3 前后對比
該方法與其他方法的區別在于:其他方法大多都是根據無人駕駛汽車行駛在彎道上時不斷地識取彎道上車道線等特征,然后系統擬合線形(其中有三次樣條、五次方程式等方法),再得到中心線的線形,從而得出線形方程式,由此無人駕駛汽車進行轉向盤的調整,實現轉彎。而我們的方法在于:一開始進行道路設計時所有彎道的線形就已知,即為三次樣條曲線,各車道中心線的函數式也就已知,把各彎道路段的線形特征錄入無人駕駛汽車系統。
4.4 應用
在設計道路時,由于采用了三次樣條曲線對道路線形進行了擬合,從而得到了線形的函數式,然后將道路的線形設計圖與無人駕駛開發商共享,在無人駕駛的代碼程序中加入道路線形參數,使得無人駕駛汽車在未駛入道路之前就已經獲得了道路的線形要素,從而當車輛行駛在任何彎道上時就不用識別彎道的線形特征,只需根據已知的線形方程式進行轉向調整,且線形又符合車輛的行駛軌跡特征。在車輛駛入道路的同時,無人駕駛汽車通過原有技術利用傳感器獲取周邊交通環境,上傳云端進行數據處理。[9]在此階段再次利用三次樣條函數曲線進行路徑決策,經過實驗數據比對分析,發現利用樣條函數曲線迅速,安全的進行路徑決策反饋,故這樣可使無人駕駛汽車在彎道上快速、平穩、安全的行駛。
5 結語
本文主要通過將樣條函數曲線擬合道路線形和現有的道路線形設計方法相結合,使得道路線形設計在滿足現有的規范要求的條件下更加符合車輛的行駛軌跡,而且更具技術性和經濟性。將我們的研究思路運用到現有的道路線形設計中,可使線形在布線時更加方便、自由、靈活,同時對于路線方案在實際工程上的布設也更具適用性。
復雜的道路環境將對計算機算法將提出巨大的挑戰,因此我們若是能夠在道路設計階段就進行優化,選取符合汽車行駛軌跡的道路線形,運用樣條函數進行擬合設計,得到相應路段函數曲線函數,然后將其數據儲存在云端,將道路線形信息并入車聯網系統,在車輛未駛入道路之前就已經獲得道路的信息,然后做出相應的調整,從而建立起適宜無人駕駛汽車行駛的路線條件。
參考文獻:
[1]張珂.道路線形優化設計分析[J]. 中州建設, 2007,(10): 68.
[2]崔金垚.山區四級公路連續彎道車輛行駛軌跡偏移量特性研究[D].福建農業大學, 2016:7-12.
[3]何平.樣條函數在曲線擬合中的應用[J].工業儀表與自動化裝置,1993,(3):12-16.
[4]中華人民共和國行業標準.JTG B01-2014 公路工程技術標準[S].北京:人民交通出版社股份有限公司,2016.
[5]徐進.軌跡-速度協調控制的山區公路平面線形設計方法[J].中國公路學報,2013,26(4):0043-14.
[6]嚴新平,吳超中.智能運輸系統——原理、方法及應用[M].2版.武漢:武漢理工大學出版社,2014.
[7]張文輝,林子安,劉彤,等.基于改進人工魚群算法的機器人路徑規劃[J].計算機仿真,2016,(12):374-379,448
[8]馮來春,梁華為,杜明博,等.基于A*引導域的RRT智能汽車路徑規劃算法[J].計算機系統應用,2017,26(8):127-133
[9]董長青,丁田妹,黃曉廷,趙鵬超.無人駕駛的人機交互方式研究綜述(J),時代汽車,2017(14):11-12.
