噴涂機器人專利綜述
2019-09-10 20:23:34李雅娟陳飛
理論與創新 2019年10期
李雅娟 陳飛
【摘? 要】噴涂機器人,是指能夠自動噴漆或者噴涂其他的工業機器人,本文從專利文獻的視角對噴涂機器人技術的發展進行了全面的統計分析,總結噴涂機器人相關的國內和國外專利的申請趨勢、主要申請人分布以及主要申請人的專利戰略布局,并進一步分析了重要技術分支的發展趨勢。
【關鍵詞】機器人;噴涂;噴漆;結構;控制
1噴涂機器人技術概述
20世紀60年代以來,機器人作為機電一體化和現代生產自動化的典型代表,在制造業領域的應用獲得了巨大的成功。上世紀70年代,出現了世界上第一臺噴涂機器人。
噴涂機器人主要由機器人本體、計算機和相應的控制程序組成,本體結構通常采用5或6自由度關節結構,手臂有較大的運動空間,并可作復雜的軌跡運動,其腕部一般有2~3個自由度,可靈活運動。噴涂機器人廣泛用于汽車、儀表、電氣、搪瓷等工藝生產部門。
通過對噴涂機器人技術的專利文獻收集、標引和梳理,對涉及噴涂機器人結構形式領域的專利文獻樣本的分析可知,噴涂機器人的研究重點包括三個主要方面:機器人結構,控制系統,軌跡規劃方式三個方面。
2噴涂機器人專利申請整體情況
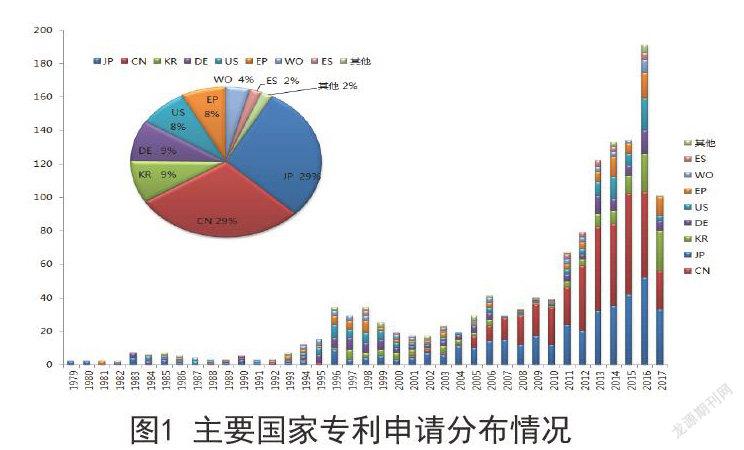
圖1示出了1980-2018年噴涂機器人的全球主要國家專利申請分布。其中,柱狀圖中柱狀高度表示了噴涂機器人申請量的年份變化,每條柱狀中的不同顏色體現了不同國家在該年度的申請量,餅圖表示噴涂機器人的全球申請總量國家分布。
可以得出:噴涂機器人在全球的專利申請情況可以分為四個階段:
(1)1995年以前(初步發展階段):全球申請量較少,處于起步階段,國外研究人員開始從理論上對機器人應用于噴涂噴漆工作進行相關研究,而中國在這方面沒有相關研究;
(2)1995-2000年(快速增長階段):在這一階段,申請量大幅度上升,噴涂機器人的早期申請主要集中日本,這與日本國家勞動力緊缺以及日本汽車行業迅猛發展密切相關;此時,國內開始有零星幾篇專利將工業機器人應用于噴涂方向;總體而言,這期間是噴涂機器人技術的一個發展高潮。
(3)2000-2005(平穩發展階段):該階段,申請量略有下降,技術研發基本處于平穩發展階段;仔細分析該平臺期的出現,不難發現,實際噴涂機器人的發展與汽車行業的發展曾正相關態勢,1995-2000年間為汽車工業的發展快速增長期,帶來了噴涂機器人的繁榮;而之后的全球經濟危機使得汽車行業處于低迷期,因此,噴涂機器人的發展也大受打擊。
(4)2006年-至今(成熟階段):2006年后,專利申請量再次大幅上升,噴涂機器人也從理論和實驗研究階段向實用化方向發展,在各行業中發揮越來越重要的作用。對于中國國內的專利申請而言,在2006年前,中國專利數量一直屬于一個很低的水平,可以說明國內企業的研究起步相較于國外而言比較晚;國外企業對中國市場也不太重視,而在2005之后,中國市場需求逐步打開,申請數量平穩快速增大,甚至申請量高于國外,屬于技術迅猛發展期,這說明隨著中國市場的發展,各種企業也開始重視中國區域,大量在中國進行專利布局,同時隨著國內一些高校企業對機器人研究進一步深入,專利競爭進一步加劇。
可以看出,截止到2017年,中國關于噴涂機器人的專利占有量已經與日本持本,不難理解,首先,現今中國的自動化行業發展迅速,與噴涂機器人的相關行業,例如汽車行業、智能制造、計算機控制等技術均得到了較快的發展,這些行業的發展支撐了噴涂機器人的研究進一步深入;其次,由于中國各項制度的不斷完善,專利保護獲得了較大行業的關注,國外企業也企圖在中國進行專利布局,使得噴涂機器人專利申請在中國呈現了百花齊放的局面。
3噴涂機器人技術發展路線
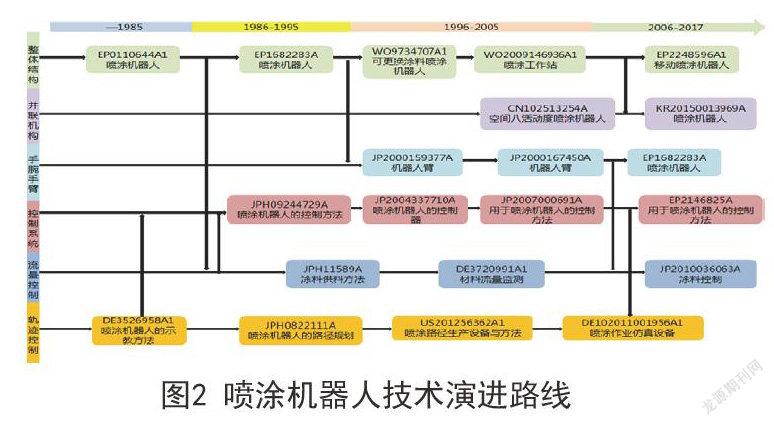
對噴涂機器人領域的專利申請進行技術分析后,可以得出如圖2所示的噴涂機器人技術演進路線圖。
可以看出,噴涂機器人早期涉及的技術手段主要是機器人的整體結構以及機器人的軌跡控制,其中軌跡控制主要以人工示教方式為主。
在1986-1995期間,噴涂機器人的迅猛發展期,噴涂機器人涉及的技術分支明顯相比于早期的技術分支更多,其中有針對控制器和控制方法的申請、噴涂機器人涂料流量控制以及涉及機器人的手臂以及手腕結構的技術分支出現,這個時期的申請大部分是日本的申請。這個時期的日本的汽車工業迅猛發展,帶領了噴涂機器人的進一步發展,各技術分支中均出現了大量的日本申請,且這些申請質量較高,使得日本在噴涂機器人行業一直處于較為領先的地位。
在1996-2005年期間,噴涂機器人的專利申請繼續在原有基礎上進一步深入,此時由于機械加工行業的發展,在整體結構方向,出現了由單個機器人向多機器人協調作業,作業中心以及工作站的方向轉變。而隨著技術的進一步發展以及成熟,在噴涂機器人的各技術分支中出現了較多的技術研究交叉。
在2006年之后,又出現了并聯結構形式的噴涂機器人,值得一提的是,廣西大學的并聯噴涂機器人的申請數量遠遠超過其他國內外各家企業高校。而并聯式作為機械結構中的新興分支,近年來一直廣受關注。
從整體噴涂機器人的技術脈絡圖中可以發現,噴涂機器人最早的研究國家為歐洲以及德國,在噴涂機器人發展中頁,日本的申請量大質量又高,這種情況一直持續到近年,中國國內的噴涂機器人研究起步晚,導致專利申請的內容受限,一直沒有出現高水平的專利申請。
4結束語
本文重點分析了國內外噴涂機器人的專利申請趨勢、主要申請人,并進一步分析了重要技術分支的發展趨勢;對于噴涂機器人技術領域的現有技術發展水平有了更進一步的認識。世界各國在噴涂機器人方面的研究結果表明,噴涂機器人的研究正逐步從試驗階段轉向實際應用,機器人的結構優化、控制仿真、多機協調、智能作業將成為今后噴涂機器人研究的發展方向。
本文第二作者等同第一作者
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
中國科技博覽(2016年18期)2016-10-19 08:43:03
科技視界(2016年21期)2016-10-17 17:06:18
商(2016年27期)2016-10-17 05:41:05
大眾理財顧問(2016年9期)2016-10-11 17:10:17
科技視界(2016年20期)2016-09-29 13:07:14
大眾理財顧問(2016年8期)2016-09-28 14:00:43
