多傳感器協(xié)同識別跟蹤多目標管理方法
2019-09-10 00:52:24龐策單甘霖段修生
北京航空航天大學(xué)學(xué)報 2019年8期
龐策,單甘霖,*,段修生
(1.陸軍工程大學(xué)石家莊校區(qū) 電子與光學(xué)工程系,石家莊050003; 2.石家莊鐵道大學(xué) 機械工程學(xué)院,石家莊050043)
在目標探測過程中,如何尋找一種有效的傳感器管理方法使傳感器網(wǎng)絡(luò)發(fā)揮最大效用,一直是軍事方面研究的熱點和難點問題。目前,主要存在3類基于貝葉斯理論的傳感器管理方法,即:基于任務(wù)的傳感器管理方法[1-3]、基于信息論的傳感器管理方法[4-6]、基于風險理論的傳感器管理方法[7-9]。
在以往對傳感器管理問題研究中,并不區(qū)分目標種類,而在對目標攔截的作戰(zhàn)背景下,探明目標類型至關(guān)重要,因為針對不同的目標后應(yīng)對措施也應(yīng)不同,例如當目標為偵察機時,即可采取干擾措施也可發(fā)射導(dǎo)彈攔截,甚至在威脅不大的情況下保持一定預(yù)警即可,而當目標為導(dǎo)彈時,應(yīng)發(fā)射導(dǎo)彈攔截。由此,針對不同目標探測情況下的代價函數(shù)[10]不同,傳感器管理模型也應(yīng)有所區(qū)別。此外,在目標來襲過程中,敵方會采取電子干擾等措施,探測到的目標中通常摻雜著虛假目標,在傳感器資源十分珍貴有限的情況下,對這些目標探測必定造成資源浪費;此外,在判定來襲目標為導(dǎo)彈之后,應(yīng)當通過武器系統(tǒng)對目標攔截,若對虛假目標攔截必定同時造成武器資源浪費。
本文主要研究傳感器同時對目標識別跟蹤背景下的傳感器管理方法。首先建立風險理論、貝葉斯理論和證據(jù)理論的目標識別模型;隨后考慮邊跟蹤邊識別的情況,建立跟蹤情況下的目標識別模型,并對模型進行理論分析,在模型求解過程中提出一種基于多Agent分布計算理論的分布式算法;最后通過仿真,驗證了本文方法、模型和算法的有效性、可行性。
1 模型建立

1.1 目標識別模型
本文將風險定義為不確定性事件發(fā)生后帶來的損失與該事件發(fā)生的概率乘積。將來襲目標分為兩類,一類是具有攻擊性的真實導(dǎo)彈目標C(1),另一類是虛假目標C(2)。當判定目標為C(1)時,我方將發(fā)射導(dǎo)彈攔截,則存在的風險為R(1)=c(1)p(2),其中,c(1)為發(fā)射導(dǎo)彈產(chǎn)生的消耗,p(2)為k時刻目標類型為C(2)的概率。當判定目標為C(2)時,存在的風險為R(2)=c(2)p(1),其中,c(2)為敵方導(dǎo)彈擊中我方設(shè)施后帶來的損失,p(1)為k時刻目標類型為C(1)的概率。
我方在作決策過程中,遵循風險最低原則,將風險定義為

對目標類型的判斷為C=arg R。


在傳感器si獲得觀測值后,si獲得的關(guān)于k+1時刻目標tj類型的后驗概率為

式中:K為證據(jù)之間的沖突概率。
1.2 目標跟蹤模型
目標tj的運動狀態(tài)狀態(tài)轉(zhuǎn)移矩陣為
式中:T為采樣時間,本文取T=1 s。

在k+1時刻,目標tj的狀態(tài)為式中:W 為過程演化噪聲,為均值為0的高斯白噪聲。
協(xié)方差矩陣為式中:σx、σy為噪聲的功率譜密度。
在k時刻傳感器si對目標tj的觀測為

狀態(tài)觀測矩陣為

將上述極坐標轉(zhuǎn)化為Cartesian坐標系坐標,有

對模型進行線性近似,觀測矩陣為

此時,目標坐標協(xié)方差在Cartesian坐標系坐標中的協(xié)方差矩陣為

給定k=0時刻目標tj的初始狀態(tài)Xj0,及其均值E()=u0,協(xié)方差矩陣P0=E[(-u0)·(-u0)T]。

式中:Hi、Ri分別為傳感器si觀測矩陣、觀測噪聲矩陣。
1.3 傳感器管理模型
目標識別的過程是在目標跟蹤的過程中進行的,在目標跟蹤過程中,存在目標丟失的風險,同時考慮目標跟蹤與目標識別,建立風險函數(shù),有

此時,有

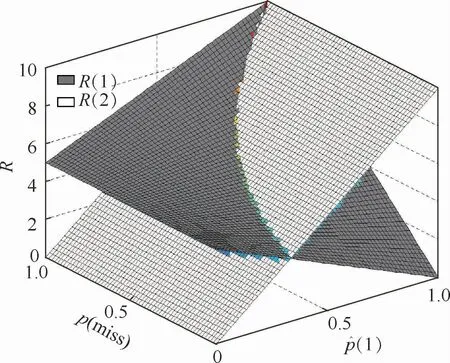
圖1 風險值分析Fig.1 Analysis of value-at-risk
由圖1可知,當目標為虛假目標時,即p(1)=0,無論目標丟失概率為何值,風險值均為0;當目標為導(dǎo)彈時,即p(1)=1,目標丟失概率越低,風險值越低;目標丟失概率越高,風險值越高,模型與實際情況相符。由式(16)和圖1可知,當目標為真目標C(1)的概率較低(p(1)→0)時,風險主要來自目標識別,一旦將真目標判定為假目標,真目標擊毀我方軍事設(shè)施,將會為我方帶來損失;當目標為真目標C(1)的概率較高(p(1)→1)時,風險主要來自于目標跟蹤,此時將發(fā)射導(dǎo)彈對目標實施攔截,在跟蹤精度較低,目標丟失概率較高的情況下,一旦攔截失敗,依然會給我方帶來損失;若 目 標 丟 失 概 率 較 高(p(miss)→1),則R(1)>R(2)恒成立,此時,不再發(fā)射導(dǎo)彈,由于目標跟蹤精度較低,丟失概率較高,導(dǎo)彈命中率較低,使武器資源浪費。


圖2 目標丟失概率示意圖Fig.2 Sketch map of target losing probability

2 模型求解及算法設(shè)計
用于求解傳感器管理方案的算法主要有集中式算法和分布式算法兩種[13-15],前者計算時間長、通信壓力大,但求解質(zhì)量高,后者計算時間短、通信壓力小,但求解質(zhì)量不如前者。由于傳感器管理過程中作戰(zhàn)態(tài)勢變化較快,使用求解速度較快的分布式算法求解傳感器管理方案,同時提高求解質(zhì)量,成為研究的熱點和難點。
本文采用分布計算的思想,其優(yōu)化思路為將整體效能函數(shù)轉(zhuǎn)化為單目標的局部效能函數(shù),將每個傳感器看作一個具有自主計算功能的Agent,每個目標通過分別優(yōu)化自身局部效能,使局部效能最優(yōu)的同時達到全局最優(yōu)。




基于以上敘述,傳感器管理流程如圖3所示。

圖3 傳感器管理流程圖Fig.3 Flowchart of sensormanagement
3 仿真實驗
傳感器的探測性能和目標參數(shù)如表1、表2所示,pf為傳感器的誤警率。我方用于目標跟蹤的傳感器為4個,在k=0時刻,同時探測到4個目標,假定目標飛行過程中均在所有傳感器的探測范圍內(nèi),作戰(zhàn)態(tài)勢如圖4所示。

表1 傳感器信息Tab le 1 In form ation of sensors

表2 目標信息Tab le 2 In form ation of targets

圖4 作戰(zhàn)態(tài)勢Fig.4 Combat situation
3.1 目標識別過程仿真
當用傳感器s1對目標t1跟蹤識別時,取前30 s,其過程如圖5所示。當用傳感器s2對目標t3跟蹤識別時,取前30 s,其過程如圖6所示。

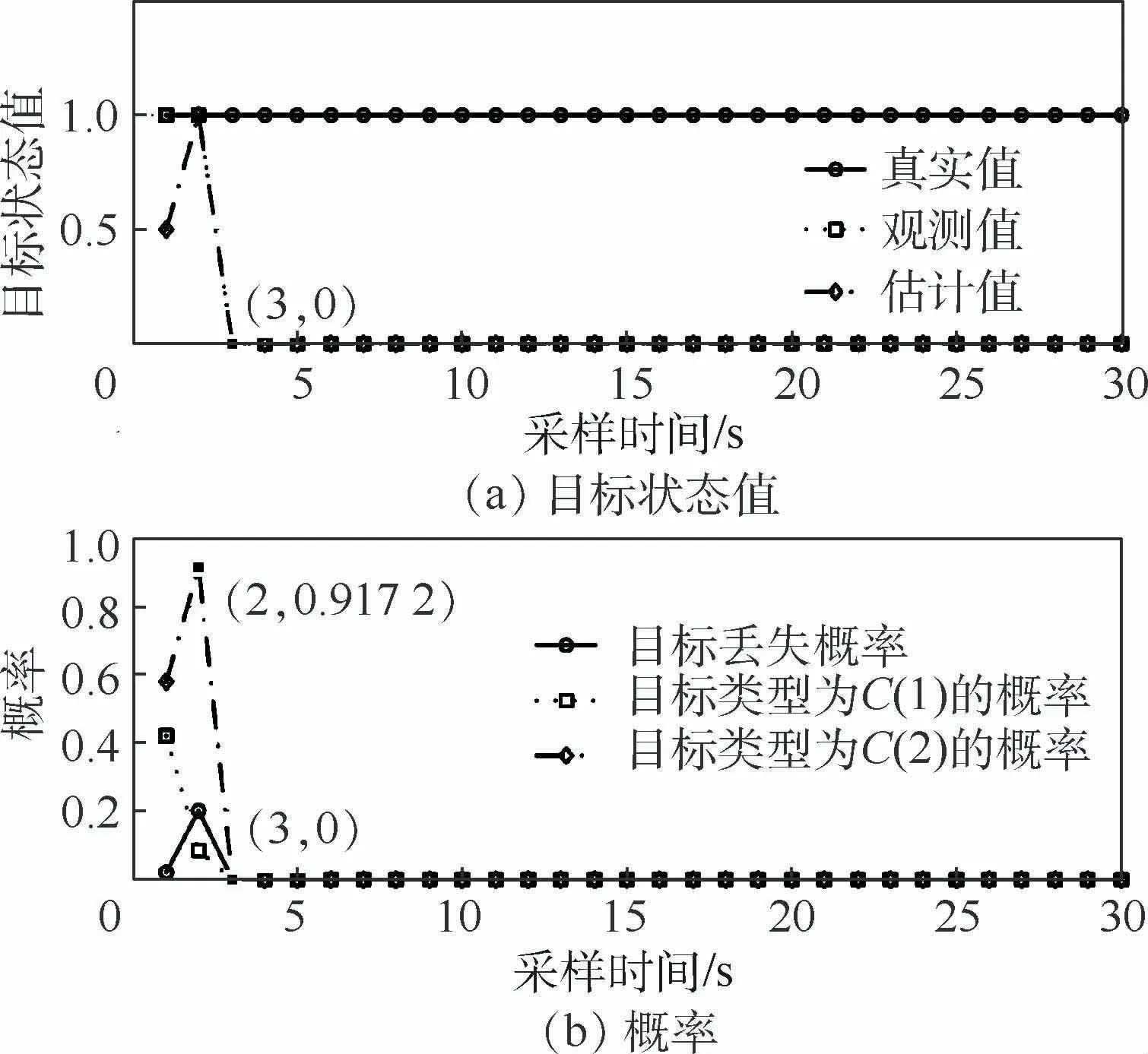
圖5 傳感器s1 對目標t1 的目標識別過程Fig.5 Process of target identification of sensor s1 to target t1

圖6 傳感器s2 對目標t3 的目標識別過程Fig.6 Process of target identification of sensor s2 to target t3
3.2 多傳感器-多目標分配
在k=0時刻,生成k=1時刻的傳感器-目標分配方案,以便后續(xù)時刻對目標進行跟蹤。在仿真過程中,將本文提出的分布式算法與貪婪算法、拍賣算法作對比,如圖7所示。
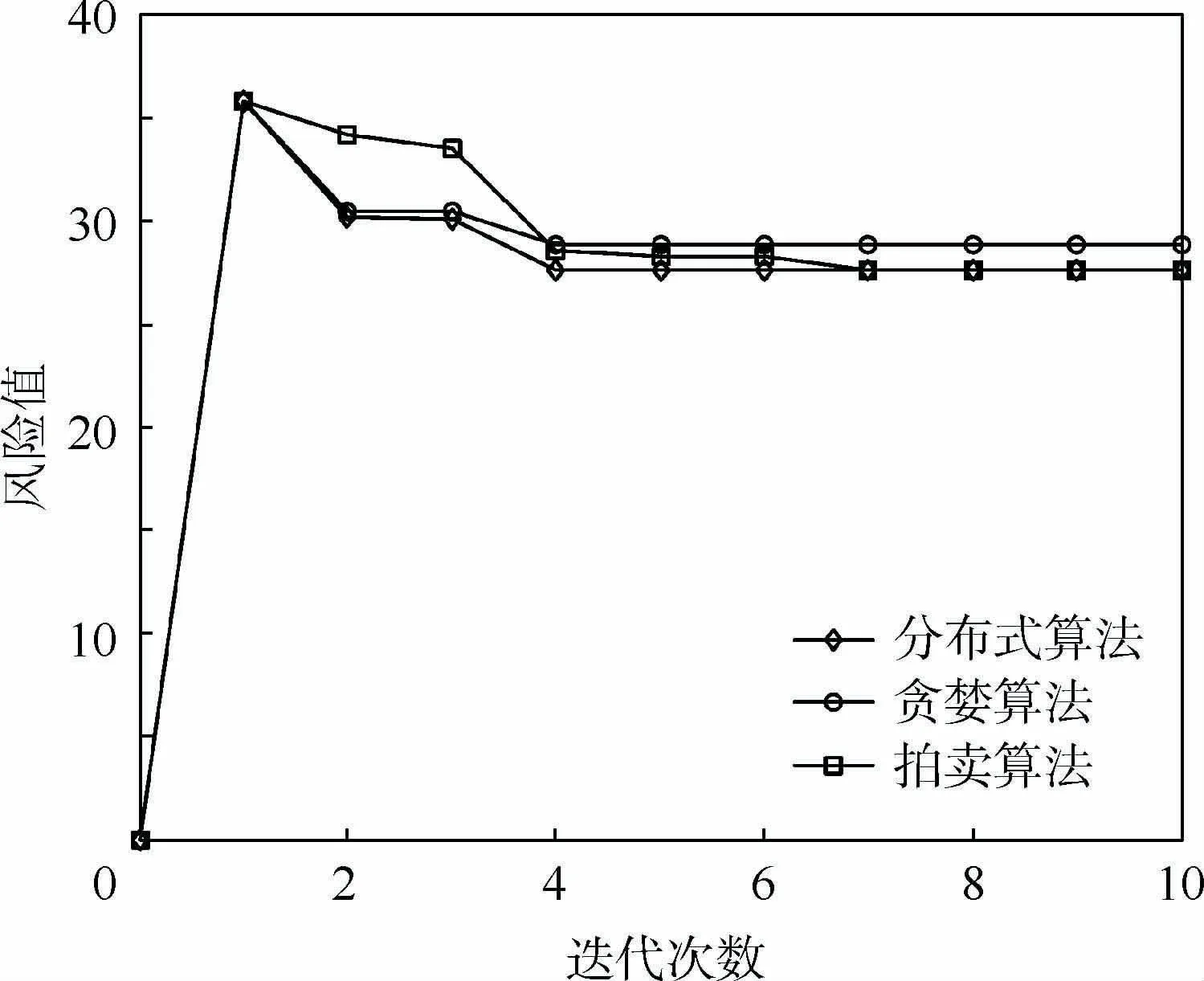
圖7 算法對比Fig.7 Comparison of algorithms
由圖7可知,與貪婪算法相比,本文算法求解質(zhì)量較高;與拍賣算法相比,本文算法求解速度較快,說明本文算法具有良好性能。
3.3 本文方法與其他經(jīng)典傳感器管理方法對比
比較經(jīng)典的傳感器管理方法為基于協(xié)方差矩陣的傳感器管理方法與基于信息論的傳感器管理方法,本文分別選取基于跟蹤精度控制的傳感器管理方法[16](簡稱跟蹤精度控制)和基于Rényi矩陣的傳感器管理方法[17](簡稱信息增量控制)與本文方法作對比。分別計算3種傳感器管理方法生成的傳感器管理方案對應(yīng)的風險值以及目標跟蹤精度,其過程如圖8所示。由圖8(a)可以看出,風險值整體呈下降的趨勢,由此可見,隨著對目標的跟蹤探測,對目標的識別風險和跟蹤風險降低。在風險值方面,傳感器管理方法的優(yōu)劣依次為:本文方法>跟蹤精度控制>信息增量控制。由圖8(b)可以看出,雖然本文方法尚未采取跟蹤精度控制的方法,但其獲得的目標跟蹤精度值最低,原因為在k=5時刻后,傳感器不再對虛假目標t3、t4跟蹤,節(jié)省出傳感器資源對真目標t1、t2跟蹤,由此避免了傳感器資源浪費。而采用跟蹤精度控制和信息增量控制的傳感器管理方法,未考慮到跟蹤目標的種類,一味追求對包括虛假目標在內(nèi)的所有目標提高跟蹤精度,由此造成了傳感器資源浪費。該分析在圖8(c)~圖8(f)中得到證實。

圖8 傳感器管理方法對比Fig.8 Comparison of sensor managementmethods
4 結(jié) 論
本文研究多傳感器協(xié)同跟蹤多目標作戰(zhàn)背景的傳感器管理問題,建立同時考慮目標跟蹤和目標識別任務(wù)的傳感器管理模型,并針對模型的求解提出基于多Agent分布計算理論的分布式算法,通過仿真驗證了模型和算法的有效性,仿真結(jié)果表明,本文方法不但能夠得到最低的風險值,還能及時停止對虛假目標跟蹤,從而避免傳感器資源浪費。在多目標跟蹤情況下,伴隨著已有目標的消失與新目標的出現(xiàn),若在對目標數(shù)目估計不準確情況下對傳感器進行管理,得到的傳感器管理方案可能欠準確,下一步將研究此種情況下的傳感器風險管理問題。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農(nóng)業(yè)(2022年15期)2022-09-20 06:56:20
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
雜文月刊(2016年1期)2016-02-11 10:35:51
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
現(xiàn)代企業(yè)(2015年8期)2015-02-28 18:54:47