一種無人機用分布式電動舵機的研究
2019-09-10 04:15:38冉令峰
河南科技 2019年8期
關鍵詞:無人機
冉令峰







摘 要:本文設計了一種無人機用分布式電動舵機,主要采用RS-422總線和分布式布局的設計思路,完成了控制電路、功率放大電路、執行機構和控制軟件的設計。同時,通過多學科的聯合仿真及試驗驗證,證明該電動舵機設計方案的合理性和可行性,以滿足無人機對電動舵機的需求。
關鍵詞:無人機;分布式;電動舵機;聯合仿真
Abstract: In this paper, a distributed electric actuator for UAV was designed. The control circuit, power amplifier circuit, actuator and control software were designed by using RS-422 bus and distributed layout. At the same time, through multi-disciplinary joint simulation and experimental verification, the rationality and feasibility of the design scheme of the electric actuator were proved to meet the requirements of the UAV for the electric actuator.
Keywords: UAV;distributed;electro actuator;joint simulation
無人駕駛飛機簡稱為無人機,是利用無線電遙控設備和自備的程序控制裝置操縱的不載人飛機[1]。無人機能根據任務需要來搭載不同載荷,同時能進行回收,重復使用。在軍事領域,無人機因具有高靈活性、可搭載多載荷、工作時間長、生存能力強、較低的維修成本等優點[2,3],可以更好地完成監視、偵察、對目標進行打擊以及空中預警等任務,對軍事任務的完成具有重要意義。舵機作為無人機的重要執行機構,根據飛行控制系統的控制指令,控制舵面進行偏轉,進而調節無人機的橫滾、俯仰和偏航等姿態[4-6]。
本文設計了一種以RS-422總線、無刷直流電機驅動、滾珠絲杠副作為執行機構的分布式電動舵機,提高控制精度和可靠性,滿足無人機對電動舵機的需求。
1 電動舵機設計
本文設計的電動舵機是以嵌入式數字信號處理器(DSP)為核心構成的數字無刷單環位置反饋式伺服系統,由控制電路、功率放大電路、執行機構和控制軟件組成。
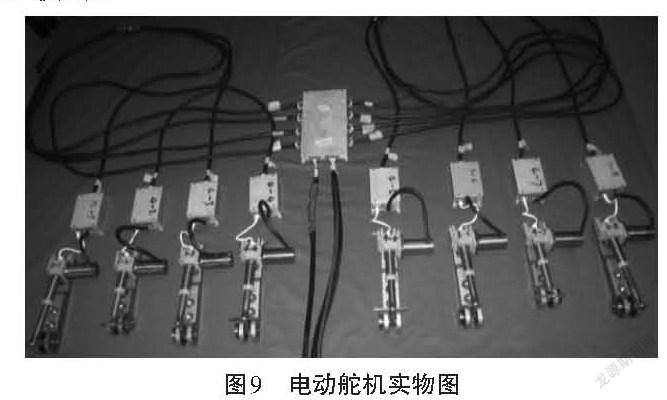
無人機的8個通道采用分布式的布局方式,即每個通道的執行機構布置在相應的舵面附近,總體布局模型如圖1所示。
工作原理:DSP綜合舵控指令和舵面位置反饋信息,通過RS-422總線,經PID控制算法運算后,輸出控制指令給執行機構中的功率放大電路,驅動無刷直流電動機轉動,經減速機構減速,通過傳動機構輸出系統所需的驅動力矩,克服舵面上的負載力矩,推動舵面轉動到指令規定的位置。
1.1 控制電路設計
控制電路主要由數字信號處理電路、總線驅動電路、差分接收電路、位置解碼電路、通信接口電路、功率電源電壓檢測電路和二次電源變換電路等組成。
工作原理:控制電路采用以DSP為核心的全數字控制方式,以RS-422總線實現與外部信息的交換。通過DSP的SPI接口接收8個執行機構中位置傳感器的測角信息,在DSP內進行綜合運算后輸出控制信號,實現對8通道執行機構的驅動控制。
控制電路的組成框圖如圖2所示。
1.2 功率放大電路設計
功率放大電路包括電機功率驅動電路、電源瞬態抑制電路和二次電源變換電路。電機驅動電路由光耦隔離電路、組合邏輯電路、功率驅動電路、三相逆變電路和過流保護電路等五部分組成,工作原理框圖如圖3所示。
1.3 執行機構設計
執行機構由傳動機構和位置傳感器組成,實體模型如圖4所示。
工作原理:在控制電路輸出的控制信號作用下,經過功率放大驅動電機轉動,并由傳動機構減速,將電機輸出的高速小力矩轉動變換為系統所需的低速大力矩轉動,推動執行機構運動,實現無人機舵面偏轉。固聯在絲杠端的位置傳感器測量出轉動的圈數,并反饋給控制電路。
執行機構的主要特點如下:①減速機構采用齒輪+滾珠絲杠副組合減速方式,通過絲杠螺母直接推動搖臂機構,帶動舵面轉動;②為滿足無人機內部的空間要求,無刷直流電機與減速機構采用正交布局,通過錐齒輪傳動來改變傳動方向;③位置傳感器采用非接觸的相對型磁電式編碼器,通過測量滾珠絲杠的轉數來間接實現舵偏角的測量。
1.4 控制軟件設計
控制軟件以嵌入式DSP為硬件平臺,采用模塊化結構設計。
工作原理:電動舵機上電后,程序自動運行并進入主程序,在主程序中完成系統及外設初始化等工作,最后開放中斷,進入循環等待狀態等待定時器中斷的到來。定時中斷服務程序是軟件的控制樞紐,通過對各功能模塊的合理調配,完成整個軟件的時序調度。
2 結構強度仿真
結構的一端通過銷子與舵面的搖臂連接,另一端通過銷子和支座安裝到舵機機體上,兩個銷和孔的配合間隙最大為0.027mm,滾珠絲杠副的軸向間隙為0.008mm,轉化到舵面的扭轉間隙為4.7′。尺寸外形圖如圖5所示。
應力分布云圖如圖6所示。從圖中可以看出,最大應力點出現在連接銷處,最大應力為300.9MPa,材料為15-5PH不銹鋼,最小許用應力為579MPa。
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32
電子技術與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26
