改進粒子群算法與fmincon函數混合尋優的平面度、垂直度誤差評定
2019-09-10 07:22:44許家赫陳岳坪
廣西科技大學學報 2019年4期
許家赫 陳岳坪




摘? ? 要:平面度、垂直度誤差是檢驗幾何產品互換性的重要參考指標,對使用性能檢測及產品品質的評價有著重大影響.最小二乘法雖然使用廣泛,卻只能適用于對測量精度需求度不高的應用場合.為使平面度、垂直度誤差評定值精準度更高,依據新一代產品幾何技術規范與驗證為框架,采用最小區域法,建立平面度、垂直度誤差評定數學模型.運用一種根據粒子早熟收斂程度進行自適應調整權重的PSO算法與fmincon函數混合尋優的方法實現對平面度、垂直度誤差的優化與評定.通過測量箱體尺寸數據分析計算,對比文獻數據結果進行驗證,證明了該評定方法的有效性及評定結果精確性.
關鍵詞:平面度誤差;垂直度誤差;fmincon函數;自適應調整權重;混合尋優
中圖分類號:TG83? ? ? ? ? DOI:10.16375/j.cnki.cn45-1395/t.2019.04.016
0? ? 引言
隨著社會生產對產品使用要求日趨增高,平面度和垂直度作為評價幾何產品位置精度的重要影響因素,是產品應用性能的重要參考指標.國外研究起步早,提出了引入垂直度偏轉參數,進而校正補償[1]等方法.國內則多用最小二乘法(Least Square Method,LSM)構建基準直線[2]的方法.最小二乘法由于應用便捷,目前廣泛應用,缺點是誤差精度不高,結果不穩定.考慮到產品生產和社會應用的實際情況,對平面度、垂直度誤差精準而有效計算的需求更為迫切.
利用最小區域法[3],根據新一代產品幾何技術規范(Geometrical Product Specification and verification,GPS)體系標準,計算平面度誤差和線對面的垂直度誤差,把一種以粒子的早熟收斂程度為調整權重依據[4]的自適應性PSO算法與fmincon函數進行混合尋優,并且運用計算基準要素與被測要素之間的最大變化范圍為最小的原則,用以對測量數據進行有效評定.
1? ? 構建目標函數模型
1.1? ?建立基準平面
因加工誤差無法消除,導致實際工作表面非理想狀態,實際表面不能有效且完整表達,以新一代GPS誤差體系標準為依據,應用前需要對實際表面進行檢測、擬合、操作、認定[5],并用認證表面代替實際工作面.平面評定過程中運用此方法時,因基準無法直接獲取理想要素,所以誤差基準要素評定的精準度最為關鍵,故可使用分離、提取等操作手法[6],用以高效分析和研究誤差基準選取的正確與否,將基準理想化,從而達到使用要求.
按照平面度的定義,用兩平行平面將被測區域中所有點完全包圍,兩平面的最小間距即稱作平面度誤差.若被測平面內所有距離的最大值與最小值的絕對值之差為最小,則根據定義該平面就是要被創建的基準平面,上述計算所得差值的大小便是所求平面度的誤差值.
設空間坐標oxyz的基準擬合平面方程為:
[z=ax+by+c]? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(1)
式中,a、b、c為待定系數.
被測輪廓上的點則設為[Pi(xi,? yi,? zi)],[(i=1,? 2,? 3,? …,? n)],接著需要計算該點到基準平面距離d:
[di=z-axi-byi-ci1+a2+b2]? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (2)
最后得到滿足最小區域法的平面的目標函數:
[f(a,? b,? c)=min(dmax-dmin)]? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (3)
使目標函數[fa,? b,? c]的函數值尋優為最小,即將計算擬合平面問題轉化為優化[a、b、c]值的問題.
1.2? ?基準平面坐標變換
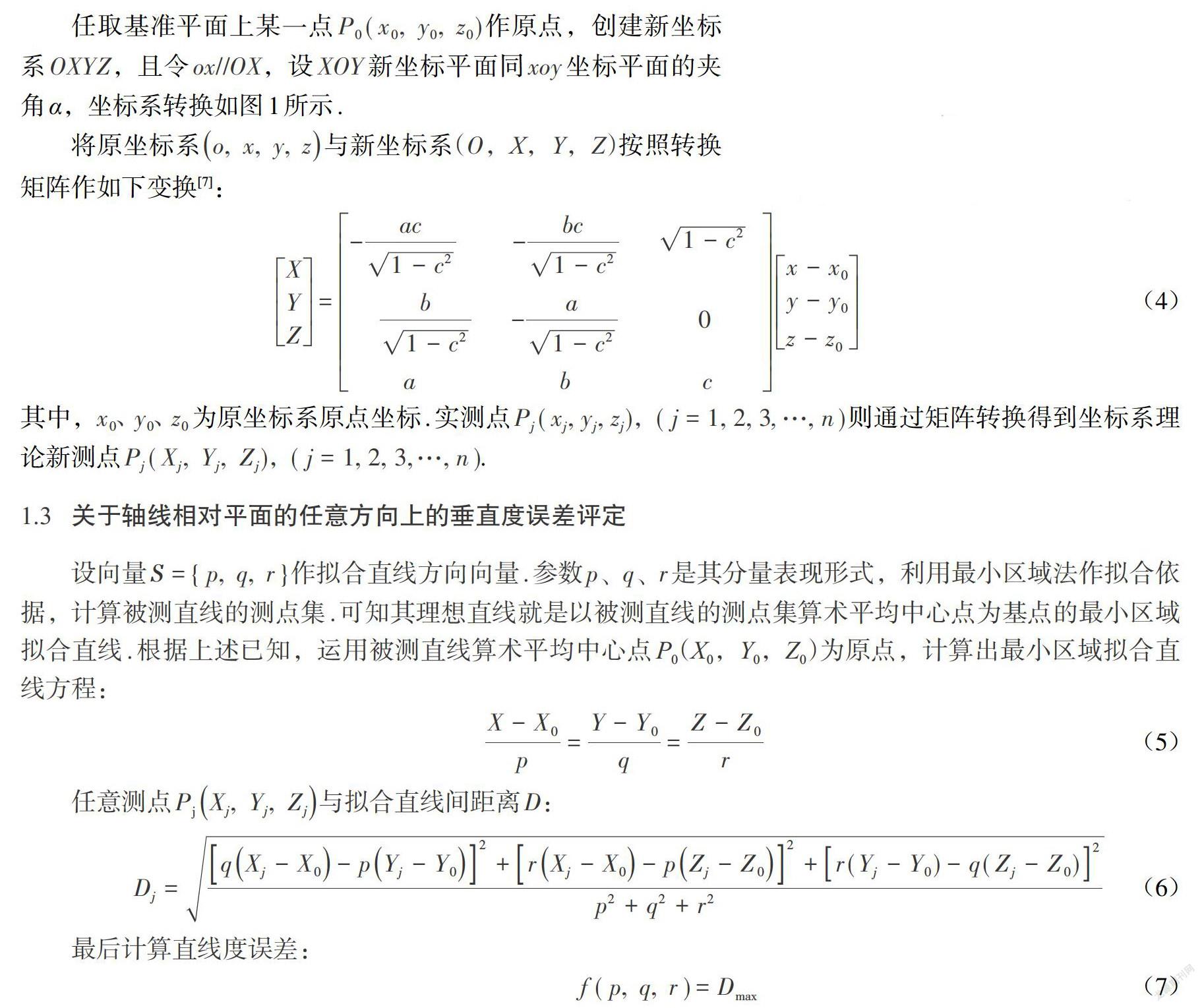
任取基準平面上某一點[P0(x0,? y0,? z0)]作原點,創建新坐標系[OXYZ],且令[ox//OX],設[XOY]新坐標平面同[xoy]坐標平面的夾角α,坐標系轉換如圖1所示.
將原坐標系[o,? x,? y,? z]與新坐標系([O],X,Y,Z)按照轉換矩陣作如下變換[7]:
[XYZ=-ac1-c2 ? ? -bc1-c2 ? 1-c2 b1-c2 -a1-c2 0 ? ? ? ? ? a ? ? ? ? b cx-x0y-y0z-z0]? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(4)
其中,[x0、? y0、? z0]為原坐標系原點坐標.實測點[Pj(xj, yj, zj)],[(j=1, 2, 3,…, n)]則通過矩陣轉換得到坐標系理論新測點[Pj(Xj,? Yj,? Zj)],[(j=1, 2, 3,…, n)].
1.3? ?關于軸線相對平面的任意方向上的垂直度誤差評定
設向量[S={p,? q,? r}]作擬合直線方向向量.參數[p、q、r]是其分量表現形式,利用最小區域法作擬合依據,計算被測直線的測點集.可知其理想直線就是以被測直線的測點集算術平均中心點為基點的最小區域擬合直線.根據上述已知,運用被測直線算術平均中心點P0(X0,Y0,Z0)為原點,計算出最小區域擬合直線方程:
[X-X0p=Y-Y0q=Z-Z0r]? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (5)
任意測點[PjXj,? Yj,? Zj]與擬合直線間距離D:
[Dj=qXj-X0-pYj-Y02+rXj-X0-pZj-Z02+r(Yj-Y0)-q(Zj-Z0)2p2+q2+r2]? ? ? (6)
最后計算直線度誤差:
[f(p,? q,? r)=Dmax]? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(7)
要求得滿足最小區域擬合直線的p、q、r值,需要將式(6)優化計算取得最大值后再代入式(7)尋求最小值.
所求任意方向的傾斜度誤差值可以根據定向誤差評定理論知,是以擬合直線為軸線的,滿足最小條件的圓柱面直徑值.通過對理想正確角度α進行設置,例如α=0°或90°時,線對面傾斜度誤差則會轉化成為平行度誤差及垂直度誤差,因此垂直度誤差為:
[F(p,? q,? r)=max(2Dj)]? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (8)
2? ?自適應粒子群優化與fmincon函數混合尋優操作步驟
2.1? ?粒子群算法和fmincon優化函數
粒子群優化算法(Particle Swarm Optimization,PSO),其特點是將解的值初始隨機化,利用適應度評價解的品質,迭代尋求最優解.每個粒子均“配置”有適應值和速度矢量,通過跟隨當前空間里搜索到的最優值來搜尋全局最優[8].
將隨機產生N個粒子當做一個部落,每次迭代粒子會通過跟蹤兩個極值自我更新,分別是個體極值pbest,和全局極值gbest.搜索到最優值后,粒子依照如下公式更新速度和位置[9]:
[vβd=ωvβd+c1r1(pβd-xβd)+c2r2(pgd-xβd)]? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(9)
[xβd=xβd+vβd]? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(10)
其中,[vβd]表示粒子[β]在d維時的速度,[pβd]表示粒子[β]在d維時的位置,[ω]為慣性權重. fmincon函數通過MATLAB優化系統工具箱提供,運行時首先檢查有無梯度表達提供,從而對目標函數進行不同的算法迭代運算.因此對非線性有約束優化問題可以快速且高效的解決.
2.2? ?以早熟收斂程度作權重調節依據的自適應粒子群算法[10]
該算法根據種群里早熟收斂情況和個體適應值為參考依據,動態調節權重變化.設定粒子[pi]的適應值為[fi],最優粒子適應度[fm],則平均適應值[favg=1ni=1nfi],計算中將優于平均適應值粒子的適應值求平均記為([favg]),定義[Δ=fm-favg].根據適應值不同可將群體分成3部分,可將慣性權重[ω]作如下調節:
1)若[fi]優于[favg],則
[ω=ω-(ω-ωmin)·fi-favgfm-favg]? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (11)
2)若[fi]優于[favg]小于[fm],慣性權重不變.
3)若[fi]小于[favg],則
[ω=1.5-11+k1·exp(-k2·Δ)]? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (12)
其中,k為控制參數,k1控制[ω]的上限,k2控制權重的調節能力.若粒子處于疏散狀態,[Δ]則較大,[ω]變小,此時算法局部搜索能力加強,使群體趨于收斂;若粒子表現為高度聚集狀態,[Δ]則較小,[ω]變大,從而快速有效跳出局部最優解的情況.
該方法能使粒子具有更強適應性,提高了局部搜索能力,通過與fmincon優化函數進行混合尋優,更顯著提高了收斂速度與計算精度,增強了粒子多樣性,提供了自我調節能力,并且優化了粒子全局搜索能力.
2.3? ?基本實現步驟[11]
Step1? 隨機化種群中粒子位置和速度.
Step2? 計算各粒子適應值的大小,并對每個粒子進行評價.同時將相關粒子的位置和適應值的信息存儲于個體極值pbest中,將最優的個體位置和適應值保存在全局極值gbest中.
Step3? 根據式(9)、式(10)更新位置和速度.
Step4 根據式(11)、式(12)更新權重.
Step5? 比較當前所有的pbest和gbest,并更新gbest.
Step6? ?若達到停止條件,停止搜索并輸出結果,否則返回Step3繼續搜索,直到滿足停止準則為止.
Step7? ?為防止搜索的結果有局部最優解的情況出現,將粒子群優化結果值輸入fmincon函數進行處理,進行最小值尋優運算.
Step8? ?通過output指令輸出最終優化值.
3? ? 實例驗證
實驗采用三坐標測量機作為檢測工具,將箱體任意放置于工作臺上,進行測量前,先創立基于工件位置的測量坐標系,錄入坐標值時是用手動采點,最后通過數據處理系統提取測點坐標.箱體尺寸數據來源文獻[11].
平面的優化目標函數為:
[f(a,b,c)=max(z-axi-byi-c)-min(z-axi-byi-c)1+a2+b2]? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(13)
設平面[z=a0x+b0y+c0]為初始平面,[Δa、Δb、Δc]為對應參數增量,優化目標函數[f]則又可表示為[f(a0+Δa, b0+Δb, c0+Δc)],令粒子編碼表示為[T(Δa, Δb, Δc)],問題搜索維數[D=3],可將該優化目標函數轉換成[dΔa, Δb, Δc]計算,目標優化函數采用適應度函數:
[f(T)=d(Δa, Δb, Δc)=min(dmax-dmin)]? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(14)
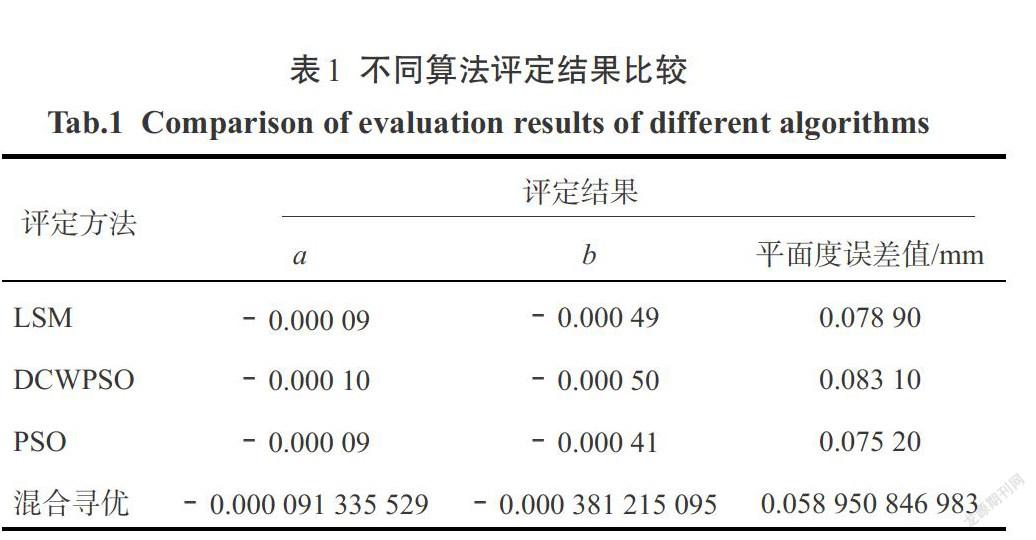
初始化種群粒子個數[N=50],其中粒子維數D=3,令學習因子c1=c2=2,隨機產生初始加速權重,最大迭代次數M不超過算法要求的最大值.輸入初始基準平面數值,a=﹣0.000 09,b=﹣0.000 49,由于平面度誤差跟基準位置無關,c值只是起偏置作用,c值可以任意選取,這里設c=﹣1.經過混合尋優計算,優化后基準平面參數為:a=﹣0.000 091 335 529,b=﹣0.000 381 215 095,c=﹣1.將上述結果代入可得
f =0.058 950 905 044 mm.
根據文獻[5]和文獻[11]中幾種不同的算法評定所得結果值進行分析比較,結果如表1所示.
根據數據對比得出:對于擬合基準平面,運用混合尋優算法,使所得基準平面計算精度更高更準確,誤差值更小,創建的基準平面擬合效果更好,尋優值更加穩定.
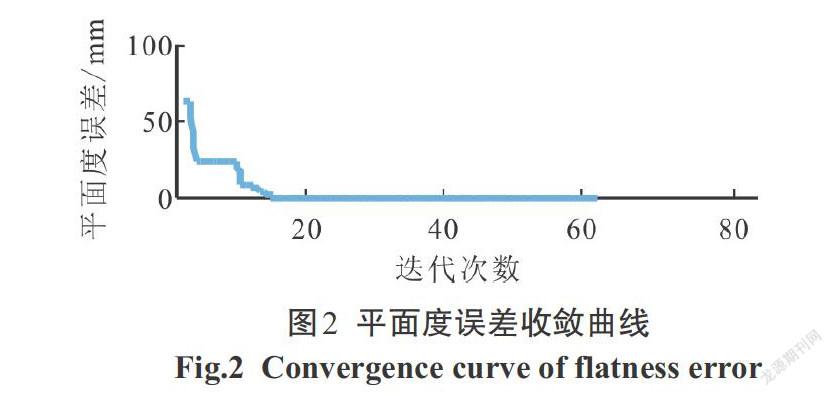
圖2為運行算法時,平面度誤差收斂曲線.觀察收斂數值發現,從第3代到第10代誤差值均為23.844 406 099 134 mm,短暫陷入了局部極值的情況.當誤差計算到22代0.092 960 135 913 mm時,達到穩定狀態,直到運行到72代,得到最小誤差? ? ? ? ?0.058 950 846 983 mm,算法結束.圖中也明顯可以看出,這種混合尋優快速穩定的特點,能夠有效擺脫局部最小值困境且沒有大范圍震蕩現象發生,不僅適應性強而且相比文獻精度高.
接著對垂直度誤差進行計算,垂直度誤差值尋優迭代過程的情況如圖3所示.通過觀察迭代計算值,可以發現當運行到第2代到第9代時誤差值均為0.804 020 151 392 mm,陷入了局部最小值情況,當計算到第14代,誤差為0.506 726 534 095 mm時基本穩定,直到55代,達到最優值0.499 839 967 830 mm.從圖中也能明顯看出當尋優迭代到15代時,垂直度誤差值基本穩定在0.5? mm左右,等到了20代以后迭代后續過程平穩,沒有突變值的發生,直到算法結束.
4? ? 總結
本文建立了滿足最小區域法的平面度和垂直度誤差評定模型,通過使用粒子群算法與fmincon函數混合尋優的方法,有效地解決了非線性約束優化問題.該方法能精準地計算出基準平面擬合所需各項參數值,同時提高了計算結果的精度,并擬合出了精度更高的基準平面,最后實現了平面度和線對面垂直度誤差的評定.
參考文獻
[1]? ? ?ZHAO G Y,WANG S J,SUI W T.Compensation approach to error of perpendicularity and mismatch error of position loop gains in CNC machine[J].Applied Mechanics and Materials, 2012(121﹣126):3190﹣3194.
[2]? ? 郭誼.直線垂直度誤差的一種評定方法[J].計量與測試技術,2008(5):21﹣22.
[3]? ? ?黃富貴.平面度誤差各種評定方法的比較[J].工具技術,2007(8):107﹣109.
[4]? ? ?溫正,孫克華.MATLAB智能算法[M].北京:清華大學出版社,2017.
[5]? ? ?李向前. 基于新一代GPS的形狀公差規范設計方法研究[D].桂林:桂林電子科技大學,2010.
[6]? ? ?馬利民. 新一代產品幾何量技術規范(GPS)理論框架體系及關鍵技術研究[D].武漢:華中科技大學,2006.
[7]? ? ?周東棟,樊軍.基于改進粒子群算法的垂直度誤差評定[J].現代制造工程,2017(2):25﹣29.
[8]? ? ?趙乃剛,鄧景順.粒子群優化算法綜述[J].科技創新導報,2015 (26):216﹣217.
[9]? ? ?張頂學,關治洪,劉新芝.一種動態改變慣性權重的自適應粒子群算法[J].控制與決策,2008,23(11):1253﹣1257.
[10]? ?杜振鑫,王兆青.一種改進的動態改變慣性權重的粒子群算法[J].微電子學與計算機,2011,28(3):85﹣88.
[11]? ?高明,鮑家定,周晴倫.基于粒子群算法的線對面的垂直度誤差評定[J].中小企業管理與科技,2012(6):203﹣205.
Evaluation of planarity and verticality errors for mixed optimization of improved particle swarm optimization and fmincon function
XU Jiahe, CHEN Yueping*
(School of Mechanical and Traffic Engineering, Guangxi University of Science and Technology,
Liuzhou 545006,China)
Abstract: Flatness and verticality errors are important reference indicators for testing the interchangeability of geometric products, which have a significant impact on performance testing and product? ?quality evaluation. Although the least squares method is widely used, it can only be applied to? ? ? ? ? ? ?applications where the measurement accuracy is not required. In order to improve the accuracy of? ? ?flatness and verticality error evaluation, a mathematical model for flatness and verticality error? ? ? ? evaluation was established based on the framework of new generation product geometry specification and verification by using the minimum area method. In this paper, a mixed optimization method of PSO algorithm and fmincon function is used to optimize and evaluate the flatness and verticality errors? ? ? ?according to the degree of premature convergence of particles. The validity and accuracy of the? ? ? ? evaluation method are proved by analyzing and calculating the measurement box size data and? ? ? ? comparing the results of literature data.
Key words: flatness error; verticality error; fmincon function; adaptive weight adjustment; hybrid? ? ? optimization
(責任編輯:黎? ?婭)