基于單片機的水下機器人圖像識別研究
2019-09-10 07:22:44周思宇劉青松朱媛媛鄭貝貝檀棋
科學導報·科學工程與電力 2019年38期
關鍵詞:單片機
周思宇 劉青松 朱媛媛 鄭貝貝 檀棋
【摘? 要】隨著人們對深海的不斷探索,水下機器人便應運而生。本文利用單片機設計了一款水下機器人,以stm32單片機為控制核心,機器人系統能夠實時獲取水下圖像,并且能通過視頻圖像反饋來調整控制作業機器人的姿態,通過控制機械臂完成水下作業。文中重點討論了圖像采集系統中的視頻圖像預處理方法,獲得了較好的整體圖像效果。
【關鍵詞】單片機;水下機器人;圖像增強;圖像濾波
1.引言
隨著科學技術和社會的發展,陸地上的資源已經漸漸滿足不了人類的需求,人們就著手于開發海洋資源。但是水下環境惡劣,人類的客觀條件等因素也限制了潛水深度,所以水下機器人已經成為開發海洋的重要工具。水下機器人的出現大大節省了成本,它可以代替人完成深海攝像和采集標本等工作,探測器上不用加裝生命維持系統,大大節省了海洋探測的成本。本文利用單片機設計了一款水下機器人,以stm32單片機為控制核心,電源采用搭載蓄電池,通過電源電路分別給單片機,樹莓派和直流無刷電機供電,機器人系統能夠實時獲取水下圖像,并進行圖像預處理,獲得了較好的整體圖像效果,以便能通過圖像的反饋來調整控制作業機器人的姿態,通過控制機械臂完成水下作業。
2.水下機器人總體結構
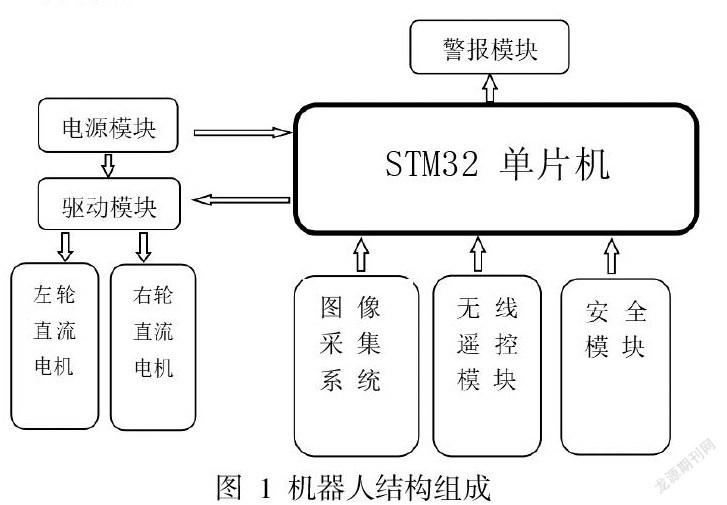
本文設計的水下機器人如圖所示,由stm32單片機,圖像采集系統,無線遙控模塊,驅動模塊,電源模塊及報警模塊組成。同時機器人還裝備一個多自由度的機械手臂以完成標本的采集、放置等一系列動作,機器人安裝有攝像頭以進行水下視覺采集、同時還具有水下機器人定高巡航、數字圖像處理等功能。
無線收發器采用封裝式無線電收發裝置,PT2262/2272是一對帶地址、具有數據編碼功能的無線遙控收發芯片,功耗低,CMOS制造工藝,外部元件少,RC振蕩電阻,工作電壓范圍為:2.6-15V,數據為6位,地址代碼高達531441。該套無線收發芯片操作簡單,價格合適,工作穩定性強。
該芯片以STM32為主控芯片,具有足夠的存儲空間,可以滿足系統軟件的需求。具有兩個中斷計數器,滿足本工作系統的需要,精確計算時間,具有良好的實效性。
3.圖像采集及預處理
圖像采集系統負責采集水下圖像信號,為取得較好的、完整的圖像,必須對圖像進行預處理。下面主要討論圖像識別的預處理。
3.1水下圖像特點
由于水的光學特性的作用,水下圖像有如下幾個顯著特點:
(1)水對光具有吸收作用,會造成水下彩色的丟失,給攝象圖像的識別帶來很大的困難。(2)水中對光源阻光、折射、散射效應,以光源為中心,徑向逐漸減弱,造成圖像背景灰度灰度不均勻。(3)水體本身的性質和水中的懸浮體、活性有機體的存在,會造成水下圖像的對比度低、噪聲明顯等。
3.2空間域圖像處理
目前,圖像噪聲的濾波方法有低通、帶通、均值、平滑以及銳化、中值濾波方法等等,濾波的目的是為包括圖像邊緣提取,圖像分割等后續圖像的進一步處理打好基礎,也可應用于圖像的重建和復原。直方圖均衡化(HE, Histogram Equalization)能夠使圖像中的所有灰度級概率均勾分布,使圖像得到增強,但如果同一個變換對整幅圖像都采用,這樣就不能適應不同區域的對比度變化情況,為了克服這一缺點,我們可以采用自適應方法進行局部直方圖均衡化,不同的圖像區域采用不同的其灰度變換函數,也可以采用動態變化窗口大小的均衡化方法,都具有比較好的處理結果。
3.3頻率域圖像處理
選擇合適的濾波器函數對圖像的傅里葉變換函數頻譜成分進行調整,調整后再進行傅里葉逆變換,這樣使得圖像得到增強。為了獲得感興趣的區域同時去掉或削弱噪聲和無關信號,在頻域增強技術中可以有針對性的選擇頻率傳遞函數。對于需要增強的頻率分量,可增加對應的頻率傳遞函數的系數;若降低對應傳遞函數的系數,可抑制或衰減的頻率分量。
低通濾波可以使圖像有效的平滑降噪,高通濾波器是抑制和衰減低頻分量的,因此,利用高通濾波可保留圖像邊緣和急劇變化的細節信息。
由于水下光照條件的限制,圖像會出現照度不均勻的情況,可應用同態濾波解決光照問題和突出細節信息,調節圖像的灰度范圍。同態濾波是將圖像分解為反射、照度兩部分,應用對數運算將乘性噪聲的照度成分轉化為加性噪聲,再通過選擇合適的濾波器函數對圖像的傅里葉變換函數頻譜成分進行調整獲得處理改善圖像的效果,保持了圖像的整體性。
4.結論
本文首先討論水下機器人的設計思路、給出了機器人的整體結構,討論了水的光學作用特點,及水對光的阻光、散射等因素的影響,重點討論了從空間域和頻率域兩方面,圖像預處理的方法。空間域是基于像素的處理方法,包括直方圖修正、灰度變換和空間域濾波等;頻率域是基于圖像的增強方法,包括同態濾波等,試驗表明,在光照不均的水下圖像中能夠獲得較好的圖像效果。在水下機器人的圖像識別能力的設計,旨在讓機器人能更好的在水下進行交互工作,同時水下機器人有著人力無法企及的地方,極大的提高了我們對海洋的探索。
參考文獻:
[1]徐義.下圖像預處理技術研究[碩士學位論文].南京理工大學,2013.
[2]R. Garcia,T. Nicosevici and X. Cufi. On the way to solve lighting problems in underwater imaging. IEEE OCEAN, 2002,10:1018-1024.
[3]Xuefei Liu, et al. A Rapid Weighted Median Filter based on Saliency Region for Underwater Image Denoising.,IEEE OCEAN, 2015.
基金項目:
本文得到嘉興學院南湖學院大學生創新項目(NH8517930)資助。
作者簡介:
周思宇,嘉興學院電氣工程及其自動化專業學生,研究方向為智能控制。
(作者單位:嘉興學院南湖學院)
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36