基于陀螺儀的智能騎行掛飾
2019-09-10 22:55:49劉世棟孫越葛楊郭嘉儀
科學導報·學術 2019年37期
關鍵詞:智能
劉世棟 孫越 葛楊 郭嘉儀
摘 要:在共享時代,單車出行成為主流。隨之而來,非機動車安全問題也在不斷增多。特別是在照明弱、霧霾天氣等能見度低的條件下,單車事故更加頻發。在這種背景下這款基于zigbee無線傳輸技術的智能騎行配件應運而生。它通過mpu6050做傳感器來感知騎行轉向,通過zigbee無線傳輸技術將數據傳給控制器做處理,點亮led燈提醒后方車輛。具有結構簡單,易于生產,價格便宜等特點。有指明單車轉向,車距提醒,事故報警等功能。
一、背景
無論是在"國際范兒"和北上廣或西方國家的道路,有在現場的非機動車道。然而,自行車和電動自行車的迅速發展一直伴隨著難于管理,事故頻發等問題。因此,非機動車的安全問題成為用戶的關注越來越多關注的焦點。天津交管部門數據公布顯示:在全市交通事故死亡人數,行人和非機動車使用更多的人員,占死亡,負責在事故總數的48.4%,占5.6%。另外一個易發生事故的重要原因是道路照明較差,燈光昏暗,缺乏車身反光設備。當視力不良條件下的非機動車出行的原因,很容易側擊車輛和非機動車發生事故的背后。此外,霧霾可能會讓可見度降低,對道路上的行人、機動車輛和非機動車輛都有很大的安全隱患,十分危險。在夜間或嚴重霧霾天氣昏暗,如果因為避障夏普車把彎曲的前車,車是很難理解汽車前進隊伍的前面,最有可能是由于時間沖突與車輛在沒有制動前面,造成交通事故。并且,除了以上路況不明的情況,日常騎行過程中也經常會出現非機動車輛由于某種原因突然轉向而引發的交通事故,由此可見非機動車輛使用轉向提示以及其他智能安全設備功能的重要性。
目前市場上已經出現的相關智能騎行配件,比如Varia智能騎行車燈,騎車人背背佳掛件智能遙控方向安全指示燈等產品,往往存在過于強調科技元素的使用,"形式重于實質",定價過高或者功能過于片面,技術含量不夠的問題,缺乏實用性,無法普及開來,使群眾受益。本著安全智能的理念,為了解決非機動車輛出行轉向無法明示易導致交通事故等安全方面的問題,本產品應運而生。
二、主要功能
本產品采用ZigBee無線傳輸模塊實現無線通信,在平常可以當做一個美觀的背包掛飾。本產品在結構上可以分成兩部分:識別模塊和控制模塊。識別模塊由龍頭方盒、MPU6050六軸傳感器、ZigBee模塊、前照探測燈四部分組成。用戶可輕擊從車把安裝和拆卸的非機動立方體,處理操作是非常容易的,通過六軸傳感器模塊的ZigBee角信息提供給控制模塊。ZigBee模塊的控制模塊,LED屏幕,蜂鳴器,最小系統板,GPS模塊,GSM模塊一體化,OV7670相機模塊。ZigBee模塊是一款非常成熟的近距離數據傳輸傳感器,它將收集到的數據傳給最小系統板,由系統板進行姿態解算,并控制LED顯示燈以及語音播報模塊進行相關的提示。
三、主要技術
ZigBee無線傳輸模塊ZigBee是一種無線連接,具有低功耗、成本低、時延短等特點。
mpu6050感測方向MPU-6000(6050)是一個集成的6軸運動處理部件,相對于多組分實施例中,不使用陀螺儀和加速度計軸線的組合差的問題,降低了包裝空間。數字矩陣輸出軸旋轉軸線或 四元數(四元),歐拉角格式(EulerAngleforma)的數據融合算法。產品通過求解在6050,滾動角和俯仰角獲得的算法計算偏航角來解決。
我們知道,歐拉角表達被旋轉的最簡單的方法,形成一個三維向量,表示所述對象物的旋轉角度大約三個坐標軸(X,Y,歐拉角表達被旋轉的最簡單的方法,形成一個三維向量,表示所述對象物的旋轉角度大約三個坐標軸(X,Y,Z軸)的值。以x,y,z軸表示偏航、橫滾和俯仰非常簡單。因此我們需要編程將6050得到的四元數矩陣轉化成歐拉角矩陣。可以指固定的三軸世界坐標系軸,旋轉軸也可以指物體坐標系。旋轉的三個軸的順序不同,會導致不同的結果。
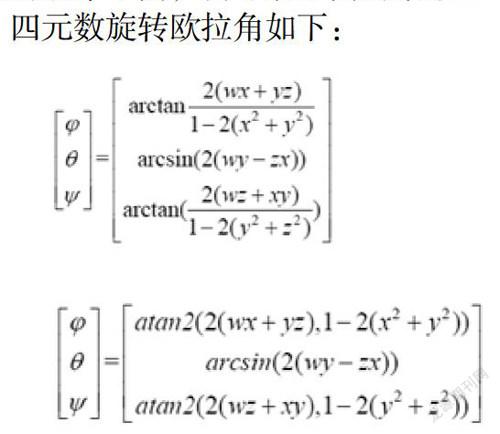
四元數旋轉歐拉角如下:
為了驗證該算法,使用六個度通過在MATLAB仿真模型提供的一個封裝好的模擬器,可以給定的扭矩和力輸出的三個歐洲拉三軸角度和角加速度,這樣可以非常好的模擬傳感器的狀態。為使達到準確的模擬結果,該模型通過調整初始輸入條件設定為固定步模式中,0.0S,即,50赫茲的模擬取樣頻率,的步驟中,歐拉角的變化可以在整個可實現角度范圍,不會出現非常短的時間,并且根據一個大的跳躍。比較的實際情況和便利性,輸出調整六個自由度模型的一個標準的域的歐拉角制成。
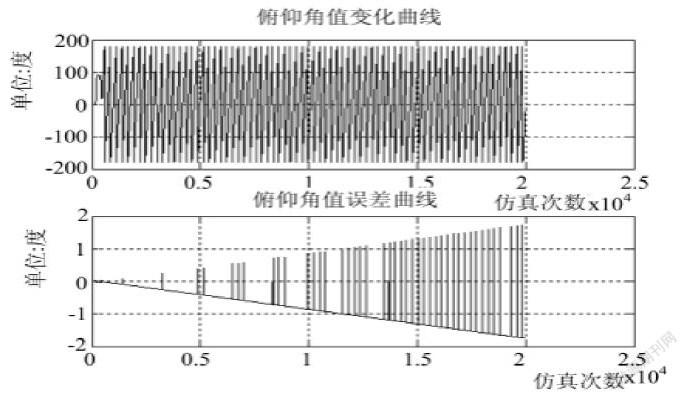
因為修正了定義域,某些點出現了強烈的變化(這些點實際上是連續的,比如說航向角低于零的點使用定義域修正后變為大于360的值,而大于360的值變成接近零的值即可),這樣就可以模擬大機動飛行條件下的飛行姿態。通過四元數微分方程更新求解過程,采用三階泰勒展開法這樣精確度較高,得到三軸歐拉角的誤差曲線如圖。三軸歐拉角的誤差在仿真過程中的最大偏差值為:[0.1422,0.6948,0.7037].為了進一步驗證算法對于計算的穩定性以及俯仰角變化的跟蹤敏感性,設計了滾轉角和偏航角均為0度,只在俯仰角大范圍連續變化下的算法仿真,下圖為400秒(20000次)下計算值與理論值之間的誤差曲線以及俯仰角值的變化曲線。可以看出,一些連續的急劇變化時,誤差值始終是一個很小的范圍內,有良好的跟蹤性能之內。
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學科學(學生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44
