平面三關節機械手的位移控制算法
2019-09-10 15:15:39白文斌
裝備維修技術 2019年3期
白文斌
摘要:本文主要介紹了平面三關節機械手在太陽能電池串全自動疊焊設備上運動時位姿的數學模型及算法,還介紹了平面三關節機械手的實際工況中,已知機械手目標位姿的坐標,求解機械手各關節需要轉動的角度的計算公式及推導過程,為控制平面三關節機械手運動軟件編程提供理論數學算法依據。
關鍵詞:機械手;平面三關節;控制算法
平面三關節機械手在太陽能電池串全自動疊焊設備中應用較廣,與龍門式直角坐標機械手相比,具有運動范圍大,占地空間小的特點。由于太陽能電池串全自動疊焊機工序較多,在有限的設備空間內,龍門式直角坐標機械手無法滿足設備自動運行的工序要求。而選擇平面三關節機械手可以有效解決此問題。
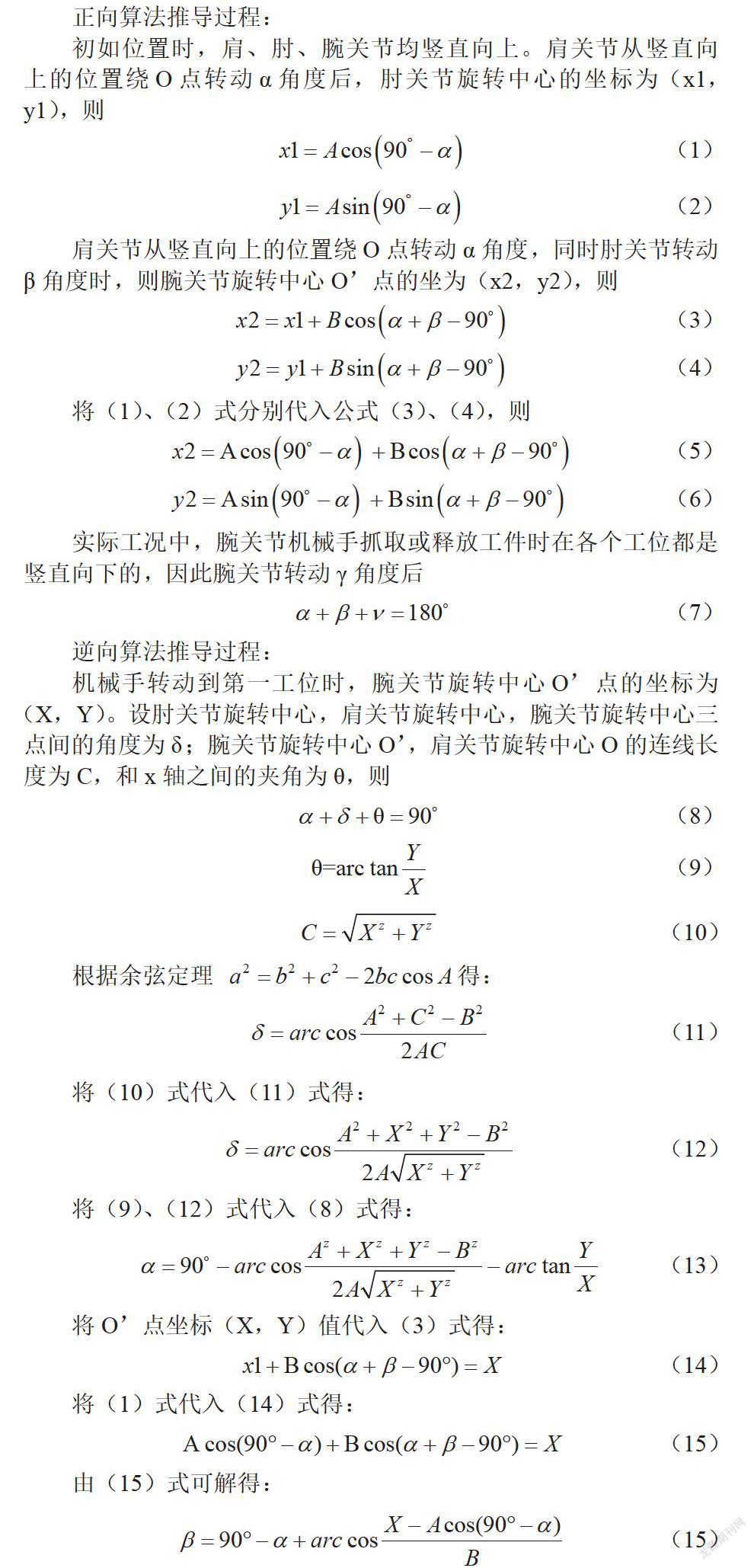
平面三關節機械手的控制,多數都是控制各個關節的動力裝置,讓各關節旋轉一定的角度,從而讓機械手末端產生一定位移。平面三關節機械手應用于太陽能電池串全自動疊焊設備中,在一個動作節拍中需要將工件從一個位置準確地移動到另一個位置,在此過程中,機械手的位姿往往是未知的,需要反推機械手相對于初始位姿變化規律。
平面三關節機械手結構簡圖如圖1所示,它包括基座、肩關節、肘關節、腕關節三部分組成。在太陽能電池串全自動疊焊機的實際應用中,基座是固定的,腕關節上的機械手需要移動到第一工位,抓取工件,之后從第一工位移動到第二工位,釋放工件。在此運動過程中,肩、肘、腕關節的長度由機械結構確定,需要推導出肩、肘、腕關節分別移動的角度與第一位移、第二位移之間運動關系的數學公式,才能寫出相應的控制算法,從而控制機械手從第一工位精確的移動到第二工位,保證設備的運行精度。
為簡化計算,設定機械手初始位置時肩、肘、腕三關節均豎直向上。機械手腕關節移動到第一工位時腕關節需垂直向下,數學模型如圖2所示。以肩關節旋轉中心為O點,水平向右的方向為x軸,豎直向上的方向為y軸,建立坐標系,機械手位于第一工位為O’點時,O’點坐標為(X,Y),肩、肘關節旋轉中心之間的距離為A,肘、腕關節旋轉中心之間的距離為B,肩關節旋轉的角度為α,肘關節旋轉的角度為β,腕關節旋轉的角度為γ。
由以上公式可得出機械手腕關節在運動范圍內任意位置時各關節所旋轉的角度,或各關節旋轉任意角度時的位置坐標。
當要從第一工位移動到第二工位時,只需分別算出這兩個工位的各種位姿參數,二者相減即可得出相對變化的參數。將各種參數嵌入到機械手控制程序中,就可以輕松控制機械手進行各種精確動作。
參考文獻
機械設計手冊編委會.機械設計手冊(新版)[M].北京:機械工業出版社,2004.
陳加海等.太陽能電池串全自動疊焊機[P].中國專利:201510419409.1,2015–07–17.
[意]Bruno Siciliano(布魯諾·西西利亞諾),[美]Oussama Khatib(歐沙瑪·哈提卜).機器人手冊[M].《機器人手冊》編譯委員會譯.北京:機械工業出版社,2012.
