艦載無人直升機艦面自動起降控制律設計
2019-09-11 11:19:52劉詩超
直升機技術 2019年3期
關鍵詞:設計
劉詩超,鄧 靜
(1.海軍裝備部駐武漢地區軍事代表局駐南昌地區軍事代表室,江西 南昌 330001;2.中國直升機設計研究所,江西 景德鎮 333001)
0 引言
艦載無人直升機具有配置方便、使用靈活、特別適合艦面起降等特點,具有其它無人飛行器無可比擬的優勢,特別適宜于現代海軍作戰的需要。通過配裝小型雷達、光電吊艙、目標指示器、中繼制導、電子戰等設備,可大幅度提高艦艇在海戰中對高風險目標的突防偵察能力、通信導航中繼能力、電子戰對抗能力、聯合作戰能力。可以說,艦載無人直升機裝備的發展已成為未來海上綜合作戰能力形成、提高和發揮的重要組成部分。為此,世界各軍事強國無不對艦載無人直升機的研制給予極大的重視。雖然近年來我國在直升機的科研方面取得了不少成果,但應該看到,在無人直升機,特別是艦載無人直升機艦面起降控制律設計技術方面沒有開展系統、深入的研究,基本上還處于起步階段,與國外先進水平相比還存在較大的差距,亟待跟上世界艦載無人直升機的研制步伐。為此,本文對艦載無人直升機艦面自動起降控制律設計技術進行研究,掌握艦載無人直升機艦面自動起降控制律設計方法,為未來的艦載無人直升機的型號研制打下技術基礎,提高我國艦載無人直升機開發能力。
1 艦面自動起降控制要求
艦載無人直升機是一個非線性、強耦合系統,艦面自動起降過程的主控通道為總距通道,同時由于總距的變化會引起其它通道的耦合響應,在設計總距通道的控制策略時必須考慮其他通道的耦合影響[1]。艦面自動起降過程中,無人直升機的狀態是在一個很小的范圍內變化,考慮工程實際操作的可行性,在設計艦面自動起降過程控制時只考慮操縱耦合,忽略狀態耦合的影響。
控制系統設計過程中將艦載無人直升機分為五個控制通道,分別為縱向通道、橫向通道、航向通道、高度通道和發動機通道。為了保證自動起降過程的安全,垂直起降過程對各通道的控制效果都提出了較高的要求。
2 艦面自動起降控制方案
2.1 艦面自動起飛控制方案
由于艦面運動的復雜性,艦載無人直升機在艦面起飛的過程較為困難,需要判斷可以起飛的時機。通常甲板運動分為平移與轉動兩種,甲板平移時艦載無人直升機起飛會疊加平移運動,但因甲板的平移速度不大,對其影響不大。無人直升機起飛后,通過帶速度反饋的位置控制,可消除起飛后的平移速度。但是,應盡量避免甲板轉動時艦載無人直升機起飛,因為這會嚴重影響無人直升機的穩定性,危及起飛安全。在復雜海浪運動與大風環境下,甲板的轉動通常可以分解為各種頻率與振幅的正弦波疊加,可通過判斷,于甲板在振蕩零位時起飛,來盡可能地緩解甲板轉動對艦載無人直升機自動起飛的不利影響[2]。
艦載無人直升機艦面起飛時,航向通道閉環接通航向保持功能,即保持當前的機頭航向;縱向與橫向為姿態保持控制與位置保持控制,即保持艦載無人直升機當前的姿態與位置,忽略艦體運動造成的位置偏移;高度通道為爬升速率控制,在艦載無人直升機爬升到設定的安全高度后,高度通道切換為高度保持控制。
2.2 艦面自動降落控制方案
相對于自動起飛過程,無人直升機自動降落過程更為困難。由于艦面運動的復雜性,直升機在艦面降落時需要判斷可以降落的時機。根據甲板的平移與轉動運動,直升機在選定降落點上方應跟隨甲板運動,以達到直升機與降落點之間的相對靜止;同時通過判斷,在甲板振蕩的短暫停止時降落,來盡可能地緩解甲板轉動對無人直升機自動降落的不利影響。
艦載無人直升機整個自動降落過程主要可劃分為著艦航線切入、降落窗口捕獲、下滑段、過渡段、跟進懸停段和最后的降落段等組成,若在下滑段或過渡段判斷不宜降落,則需要進行復飛,重新降落。自動降落的基本原則是先設計一個理想的降落軌跡,然后導引和控制無人直升機,使其跟蹤理想軌跡降落。
捕捉到艦船運動的平靜期,并在艦船運動到最上方或最下方時,控制無人直升機至降落點上空稍加停頓,即刻進行垂直下降。高度通道接通下降速度控制,當直升機距離甲板一定高度時降低總距,減小油門,直升機由于旋翼拉力減小自動下降,當觸地開關動作后,控制系統切斷各通道控制,關閉發動機,啟動系留裝置。
3 艦面自動起降控制律設計
3.1 縱向通道控制律設計
3.1.1 縱向通道增穩控制律設計
縱向通道增穩控制結構如圖1所示,控制律形式為:

(1)
式中K1及K2分別為俯仰角速率與濾波器反饋系數;τ為濾波器時間常數。

圖1 縱向通道增穩控制結構圖
3.1.2 俯仰角控制律設計
加入強積分后的俯仰角控制結構如圖2所示,控制律形式為:
引入的滾轉角交叉項用于實現縱/橫向解耦。
3.1.3 縱向位置控制律設計
縱向位置控制通過縱向通道實現,直升機低頭時向前加速,直升機抬頭時減速,因此直升機通過縱向姿態的改變實現縱向位置控制。縱向位置控制的控制律形式為:

(3)
式中Xcmd為縱向位置指令,KX,KV,IX分別為比例、微分和積分控制律系數。圖3為無人直升機縱向位置控制結構圖,前飛速度反饋作為控制律的阻尼,“-1”表示直升機低頭才前飛。

圖2 俯仰角控制律結構圖

圖3 縱向位置控制律結構圖
3.2 橫向通道控制律設計
3.2.1 橫向通道增穩控制律設計
橫向通道增穩控制律形式為:

(4)
控制結構如圖4所示。

圖4 橫向通道增穩控制結構圖
3.2.2 滾轉角控制律設計
加入強積分后的俯仰角控制結構如圖5所示,控制律形式為:

(5)
引入的俯仰角交叉項用于實現縱/橫向解耦。
3.2.3 橫向位置控制律設計
橫側向位置控制通過滾轉通道實現,直升機右滾時向右側飛,直升機左滾時向左側飛,因此直升機通過滾轉姿態改變實現橫向位置控制。橫向位置控制的控制律形式為:

(6)
式中Ycmd為橫向位置指令,KY,KV,IY分別為比例、微分和積分控制律系數。圖6為無人直升機橫向位置控制結構圖,橫飛速度反饋作為控制律的阻尼,積分通道限幅器的幅值為±2°。

圖5 滾轉角控制律結構圖

圖6 橫向位置控制律結構圖
3.3 航向通道控制律設計
為了滿足航向控制要求,航向控制采用反饋加前饋的復合控制。反饋控制為PID控制,前饋補償控制分為兩部分:旋翼反扭矩前饋補償與偏航角速率前饋補償。反饋控制器主要用于實現平衡點附近的穩定與跟蹤控制;前饋補償主要為了提高航向控制的響應速度,對旋翼負載變化的適應能力和航向跟蹤精度。
采用反饋加前饋補償的航向控制律為:
KR(R-Rg)+δp(δc)+δp(Rg)
(7)
航向控制結構如圖7所示。

圖7 航向控制結構圖
3.4 總距通道控制律設計
3.4.1 自動起飛總距通道控制律
控制律結構如圖8所示。

圖8 自動起飛控制律結構圖
控制律形式為:
當H=0時:
col_law=col_qk1
(8)
當H>0時:
col_law=col_trim+k_dh*(DH-DH_G)
(9)
當H>H1后:
col_law=col_trim+k_dh*
(DH-DH_G)+k_h*(H-H_G)
(10)
當H=H2時:
col_law=col_trim+k_dh*
DH+k_h*(H-H_trim)
(11)
其中H1,H2為某指定高度。
3.4.2 自動降落總距通道控制律設計
控制律結構如圖9所示。

圖9 自動降落控制律結構圖
控制律形式為:
當H=H1時:
col_law=col_trim+k_dh*
DH+k_h*(H-H_trim)
(12)
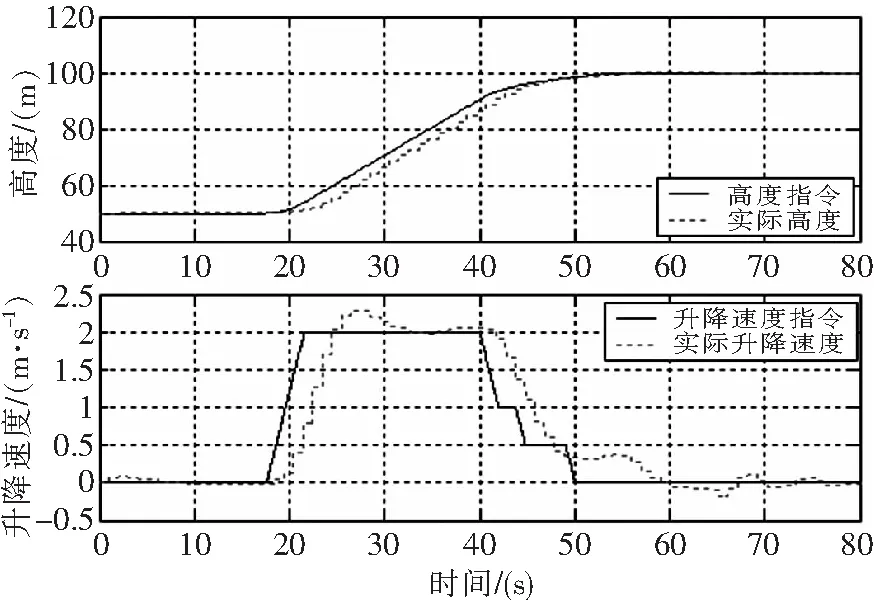
當H2 col_law=col_trim+k_dh*(DH-1)+k_h*H (13) 當H3 col_law=col_trim+k_dh* (DH-0.5)+k-h*H (14) 當H col_law=col_trim-col_qk2 (15) 其中H1,H2,H3為某指定高度。 為了驗證艦面起降控制律的正確性和有效性,基于懸停/小速度段控制技術的研究成果,以某型無人直升機為樣例機,實現了在風速小于5m/s條件下的無人直升機的自動起飛和自動降落。詳細的仿真數據曲線如圖10-圖15所示。 圖10 自動起降對應高度和升降速度的響應曲線圖 圖11 自動起降位置保持響應圖 圖12 自動起降姿態響應圖 圖13 自動起降的發動機匹配控制圖 圖14 自動起飛仿真曲線 仿真曲線表明,樣例無人直升機在起飛階段,爬升速率約為2m/s;在降落階段,其下降速率約為1m/s。無人直升機在整個起降過程平穩,縱橫向位置偏差均小于5m,姿態角變化小于2°,發動機轉速偏差小于2%,控制精度滿足指標要求。 圖15 自動降落仿真曲線 對艦載無人直升機自動起降控制律的設計和仿真分析表明采用本文的控制方法是可行、合理的。該控制律設計具有構建方便、參數整定簡單等特征,是一種值得在實際工程應用中推廣的設計方法。4 仿真驗證





5 結論
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06現代裝飾(2020年7期)2020-07-27 01:27:42流行色(2020年1期)2020-04-28 11:16:38電子制作(2019年19期)2019-11-23 08:41:36電子制作(2019年15期)2019-08-27 01:11:50電子制作(2019年7期)2019-04-25 13:18:16藝術啟蒙(2018年7期)2018-08-23 09:14:18海峽姐妹(2017年7期)2017-07-31 19:08:17Coco薇(2017年5期)2017-06-05 08:53:16商周刊(2017年26期)2017-04-25 08:13:04
