基于氣動角的氣象無人機風場測量和數據處理方法
2019-09-12 10:41:42李靜張敏賀超華夏李延暉
智能計算機與應用 2019年4期
李靜 張敏 賀超 華夏 李延暉


摘 要:風場參數的測量是氣象無人機領域的重要研究方向。本文基于空速、地速和風速的矢量三角形理論,引入無人機的迎角和側滑角,補償轉彎過程的風速,計算得出實時的三維風速和風向,建立ARMA模型,并進行濾波處理,提高風速測量精度。
關鍵詞:氣象無人機;風速;氣動角;卡爾曼濾波
文章編號:2095-2163(2019)04-0107-05 中圖分類號:TP274.2 文獻標志碼:A
0 引 言
氣象數據采集是氣象觀測的重要工作。目前,大范圍區域的溫度、濕度、氣壓、風速、風向等氣象數據均是由無人機來持續、不間斷地進行采集的。而且,無人機自身具備的使用方便、航程遠、飛行升限高、航時長等特點,使其在氣象觀測領域受到越來越多的關注和重視。但是考慮到無人機本身是在風場中運動,這將導致無人機關于風場的參數測量難度較大,因此基于無人機的風場估算和數據處理一直就是氣象無人機領域的重要研究方向[1]。
迄至目前為止,學界對這一方面工作業已取得了一定的進展。周偉靜等人[2]提出了基于無人機的風場測量解決方案,并組建了實際的飛行試驗,證明了無人機測風技術的可行性,但并未對數據進行濾波處理。周樹道等人[3]和王彥杰等人[4]研究了非慣性狀態下的風速測量原理,提高了非平穩飛行時風速計算精度。李陽等人[5]將航跡角引入測風算法,提高了測風精度,但是沒有考慮氣動角的影響。何波等人[6]對風場測量數據實現了濾波處理,也未考慮氣動角影響。綜合前述研究可知,本文基于空速、地速和風速的矢量三角形理論,引入無人機的迎角和側滑角,計算得出實時的三維風速,建立ARMA模型,并進行濾波處理,去除風速中的隨機噪聲,在轉彎過程中補償氣動角造成的誤差,提高風速測量精度。對此擬展開研究論述如下。
1 風場估計原理
1.1 風場解算模型
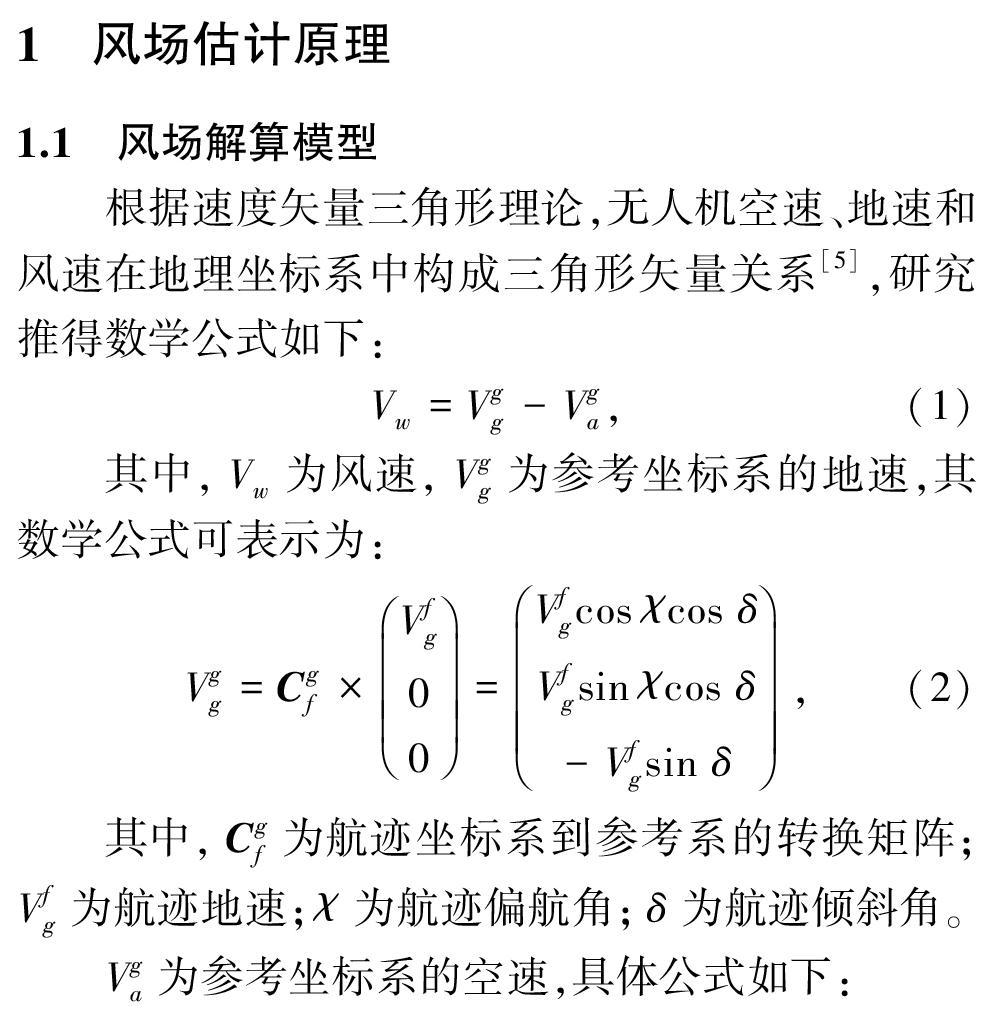
根據速度矢量三角形理論,無人機空速、地速和風速在地理坐標系中構成三角形矢量關系[5],研究推得數學公式如下:
Vga為參考坐標系的空速,具體公式如下:
1.2 非慣性運動狀態空速的計算
無人機的真實飛行狀況,受環境因素的影響,存在各種加速和減速的運動,影響無人機空速的計算。文獻[3]給出了無人機在非勻速直線運動時,與非慣性運動的加速度相關的空速的計算原理。這里,可將其寫作如下數學形式:
1.3 包含氣動角的風場估計方法
在1.1節敘述的算法中,忽略了無人機的氣動角,假設機體軸的空速等于氣流系的空速,在實際飛行中,即使在勻速直線飛行時,迎角和側滑角也不為零。為保證最大航程和續航時間等指標,無人機通常設計最經濟的巡航速度和迎角,且此迎角也不為零。同時在有風場存在的情況下,除非絕對的順風或逆風,側滑角一般都存在、且不為零。另據研究發現,無人機的氣動角對于風場解算的精度有著重要影響。無人機經常會做大量的非慣性運動,如做出加減速、轉彎、爬升和降高等飛行動作,其間氣動角變化劇烈,若將其忽略則并不適用普遍狀態下的風場測量。因此將氣動角引入風場計算,會提高風場測量的通用性和準確性。
將無人機測量的氣流系的空速,轉換到機體坐標系,則可得到:
代入式(1)即可得到三維風場的風速。
2 風場數據處理和濾波
2.1 風場建模
工程上一般采用平均滑動自回歸(ARMA)模型對風場進行建模[7]。ARMA模型是目前最常用的擬合平穩序列的模型,其通用數學表達式可表示為:
在ARMA模型建立過程中,首先要根據誤差序列的樣本自相關系數的截尾性和偏自相關系數的拖尾性來初步判定模型的階數p和q,并進行模型擬合。然后用最小二乘估計法或其它估計方法確定模型中其它未知參數的值。待所有參數確定后,對目標誤差序列進行擬合并檢驗擬合后產生的殘差序列是否為白噪聲的樣本序列,如果是,則研究建立的模型是合適的,否則就要重新進行模型辨識,直到通過檢驗為止。確定模型階次的常用方法有AIC準則和BIC準則。這里,給出2種準則的計算方法,其定義如下所示:
其中,σ2為激勵白噪聲方差;N為數據樣本總量。取不同的p和q,使AIC和BIC的值達到最小,此時即為ARMA模型的階數。
測量得到的風場數據,由于存在器件測量誤差和環境影響因素,不可能是平穩的隨機序列,因而并不滿足ARMA建模需求。故而需要對數據進行預處理,去除數據的均值和趨勢項,檢驗其平穩性和正態性,以期得到可用于ARMA建模的平穩隨機序列。
對預處理后的風速數據建立ARMA模型,運用自回歸逼近方法求得參數。根據式(9)和(10)進行計算,得出了各模型對應的參數及AIC和BIC的具體數值。各模型參數的結果對比詳見表1。
研究可知,AIC和BIC數值越小,ARMA模型適用性越強。由表1可見,ARMA(2,1)模型和ARMA(2,2)數值最小,而且AIC和BIC方法計算得到的數值趨勢一致,結果不存在異議。同時考慮模型簡潔性,這里將風場的隨機模型選定為ARMA(2,1),即:
2.2 卡爾曼濾波估計風場
將卡爾曼濾波應用到風場隨機誤差濾波中,需要確定觀測量和狀態轉移矩陣。由于風場模型由ARMA模型辨識得出,可將隨機誤差視作系統輸入。又由式(11)建立的風場數學模型,通過將N個隨機信號xt設為狀態量,將ARMA模型參數應用到濾波的狀態方程中。
通過系統方程可得卡爾曼濾波器遞推過程,將實測風場數據作為濾波器輸入,實時更新濾波器即可濾除風場隨機噪聲,進而估計風場的速度和角度[6]。
3 仿真試驗與結果分析
設無人機初始高度4 000 m,初始速度為50 m/s,沿多邊形航線定高飛行。又設風速分為背景風速和隨機風速,其中背景風速為10 m/s,仿真過程中該數值不變,其沿東向風速分量為6 m/s,北向風速為8 m/s;風向角度為53°;使用Dryden標準型生產隨機風場[8],背景風速和隨機風速一起構成無人機飛行的風場。
飛行航跡如圖1所示,坐標(0,0)點為起始點,飛行東向跨度2 000 m,北向跨度4 500 m。飛行中有多個轉彎過程,由于轉彎時無人機處于非平穩狀態,既有加減速過程,又有旋轉過程,其氣動角變化較大,將影響風場估算。所以該航跡能檢測本文提出的算法的準確度。
本次研究中,卡爾曼濾波器輸入值由仿真計算的風速數據確定,根據本文建立的ARMA(2,1)模型進行濾波處理。
3.1 平穩飛行時風場的估算
仿真中原始風速和濾波后的風速,以及風向角數據如圖2和圖3所示。圖2、圖3中截取的是仿真時間20~24 s的數據,這段時間無人機基本處于平飛狀態,沒有轉彎,沒有加、減速。其中,風向角用東向和北向速度聯立計算三角函數得出。
可以看出濾波處理能夠提高風場數據的穩定性,能夠有效抑制風場數據的隨機誤差。由圖2給出的風速數據,由于平穩飛行時風場基本穩定,即使得未濾波數據震蕩幅值基本處于合理范圍內,而濾波后風場數據,其幅值和原始數據處于相同數量級,但是連續性和穩定性得到提高。而由圖3給出的風場角度的計算,可觀察得出原始數據計算的風向角震蕩明顯,基本無法使用,究其原因就在于原始東向和北向風速的噪聲未得到抑制,而三角函數的計算疊加了2個方向的誤差,所以造成誤差的放大效應;而濾波后的數據,由于去除了隨機誤差,風向角的數據連續性和穩定性大幅提高,其角度數據合理可用。
濾波前后均值和標準差對比結果見表2。由表2可知,風速數據經濾波后的均值由10.4降至10.2,標準差由0.213 4減小到0.135 6;風向角數據經濾波后的均值由49.7提高到51.9,標準差由396.25減小到81.65,隨機誤差得到明顯抑制。
3.2 轉彎過程中風場的估算
為對比驗證本文算法的優勢,選取無人機在轉彎時估算的風場數據,截取仿真時間80~100 s的數據,繪制無人機處于轉彎過程中的風速對比示意圖,如圖4所示。
研究中,無人機空速的計算,由2.1節所示非慣性狀態下的風速計算公式求出。風場的估算,則由本文提出的包含氣動角的風場估算方法計算得出。
這個時間段無人機處于由向北飛行轉向西飛行帶來的轉彎過程,仿真飛行控制器采用副翼轉彎,由滾轉運動首先引起飛行速度方向的變化,帶動無人機機頭朝向的轉變,這個過程會引起較大的側滑角,同時也導致空速管測量的誤差;并且,轉彎還會造成升力損失,飛行控制器為保證不掉高,會加大油門量和調整升降舵,將會引起無人機的加減速和迎角的變化,而這都會影響風速的估算。
由圖4可以看出,未經過氣動角補償的風場數據,其計算結果誤差較大,難以得到10 m/s的風速真值,甚至出現負的風速,基本不能使用。而經過非慣性狀態計算的空速,以及氣動角補償和濾波處理后的風速,其均值為10.7 m/s,方差為0.875 4,雖然數據比平穩飛行時的連續性和穩定性要差一些,但是能反映出真實的風場情況,有效地提高了轉彎時風場估算的準確度。
4 結束語
本文根據傳統矢量三角形的風速計算方法,引入氣動角因素,消除氣動角引起的計算誤差,建立風場的ARMA模型,使用卡爾曼濾波消除隨機噪聲。仿真實驗證明本文提出的風場計算建模和數據處理方法,可以有效降低各種傳感器和過程計算中的隨機噪聲,提高了轉彎過程中風速和風向測量的精度。
參考文獻
[1] 周旻,王杰. 無人機測風速方案研究[J]. 艦船電子工程,2013,33(11):112-114.
[2]周偉靜,沈懷榮. 一種基于小型無人機的風場測量方法[J]. 測試技術學報,2009,23(4):297-302.
[3]周樹道,王彥杰,王敏,等. 基于非慣性運動狀態的氣象無人機測風方法研究[J]. 傳感技術學報,2011,24(1):155-158.
[4]王彥杰,周樹道,朱國濤,等. 基于轉動狀態的氣象無人機測風方法[J]. 氣象科學,2011,31(5):576-581.
[5]李陽,孔毅, 趙現斌. 氣象無人機風速解算新模型的設計及仿真研究[J]. 氣象科技進展, 2016,6(1):31-36.
[6]何波,李榮冰,劉建業,等. 基于擴展卡爾曼濾波的風速估計算法研究[J]. 電子測量技術,2014,37(6):34-37.
[7]孫國強,衛志農,翟瑋星. 基于RVM與ARMA誤差校正的短期風速預測[J]. 電工技術學報,2012,27(8):187-193.
[8]俞瑋. 變化風場的建模與大展弦比無人機飛行仿真[D]. 西安:西北工業大學,2004.
[9]徐悅,陶建偉. 飛機高精度迎角測量系統的安裝和標校研究[J]. 科學技術創新,2018(28):27-28.
[10]孫杰, 林宗堅, 崔紅霞. 無人機低空遙感監測系統[J]. 遙感信息, 2003(1):49-50,27.
[11]劉錦濤, 吳文海, 李靜,等. 四旋翼無人機風場擾動軌跡控制器設計[J]. 飛行力學, 2016, 34(2):47-50,54.
[12]吳章勤, 孫晉明, 李明東. 無人機在風電場巡檢中的應用[J]. 云南電力技術, 2017, 45(A01):98-99.
猜你喜歡
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
西南交通大學學報(2016年4期)2016-06-15 20:29:37
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
電測與儀表(2015年8期)2015-04-09 11:50:06
電機與控制應用(2015年7期)2015-03-01 03:50:15
