基于足式移動的果蔬采摘機器人設(shè)計
2019-09-16 13:04:46劉富成田壯
數(shù)碼世界 2019年7期
關(guān)鍵詞:機械
劉富成 田壯

摘要:一種基于足式移動的果蔬采摘機器人,移動方式為足式,適合在松軟地面或嚴重崎嶇不平的地形上進行果蔬采摘,具有較好的靈活性,且機身下板有矩形排布的傳感器,可按照預定軌跡行進,機械臂上安裝有視覺識別模塊,增加采摘準確性,實現(xiàn)了可在相對不平坦地形按設(shè)定軌跡,自行采摘的目的。
關(guān)鍵詞:足式移動 采摘機器人
引言
隨著中國農(nóng)業(yè)機械化的不斷發(fā)展,農(nóng)民越來越需要一種可適應(yīng)復雜地面環(huán)境并且可精確采摘果蔬的智能裝備,為實現(xiàn)一種可適應(yīng)崎嶇地面的果蔬采摘機器人,本文介紹了一種可以在崎嶇路面穩(wěn)定行走的多足果蔬采摘機器人,其主要由足式移動系統(tǒng)和視覺采摘收集系統(tǒng)兩部分組成。
1機器人系統(tǒng)組成部分
1.1足式移動系統(tǒng)
根據(jù)實際使用需求,設(shè)計足式移動機器人,通過離散的點接觸地面對環(huán)境的破壞程度也較小可以在可能到達的地面上選擇最優(yōu)的支撐點對崎嶇地形的適應(yīng)性強,六足步行機器人的腿部具有多個自由度使運動的靈活性大大增強,它可以通過調(diào)節(jié)腿關(guān)節(jié)的角度保持機身水平,不易翻倒穩(wěn)定性更高。
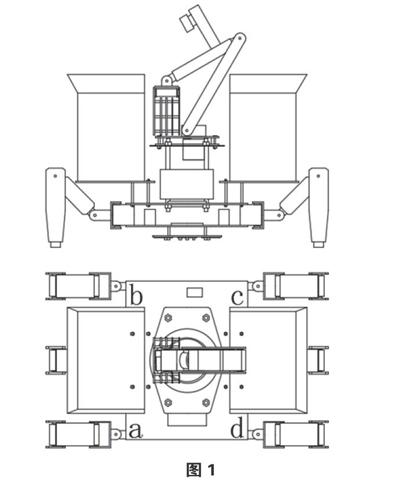
其正視圖和俯視圖如圖1,其由機身與機械腿組成,足式移動系統(tǒng)包含六只機械腿機械腿均為由三個大功率舵機構(gòu)成具有兩段機體、兩個關(guān)節(jié)的仿生腿。機械腿可按照程序運動至相應(yīng)位置,使機身可以精確的沿直線大步前進、大步后退、小步前進、小步后退,自身軸線與所走直線形成的偏角大于預定值時,也可以進行角量彌補調(diào)整。
1.2視覺采摘收集系統(tǒng)
視覺采摘收集系統(tǒng)由采摘機械臂、視覺識別模塊與收集箱組成。采摘機械臂包括可旋轉(zhuǎn)底盤、兩關(guān)節(jié)機械臂、采摘抓手,可旋轉(zhuǎn)底盤與兩關(guān)節(jié)機械臂之間、兩關(guān)節(jié)機械臂與采摘抓手之間均為大功率舵機相連接,底盤可使機械臂和抓手繞豎直軸旋轉(zhuǎn),機械臂可調(diào)整抓手的高低位置,方便采摘不同位置的蔬菜或者果實,抓手可調(diào)整其抓取裝置的仰角和展角,方便其在盡量保證果蔬完整性的條件下采摘。
視覺識別部分由openmv構(gòu)成,置于采摘機械臂的第二段機體,在機械臂調(diào)整姿態(tài)過程中,會隨機械臂隨時記錄攝像頭前的圖像,觀察到所采摘果實會向控制板反應(yīng)特殊信號;收集箱為由木質(zhì)骨架和塑料構(gòu)成的輕質(zhì)立方體狀的箱子,收集箱分為兩個,放置在采摘機械臂兩側(cè),同置于機身上板上方,前側(cè)收集箱放置水果,后側(cè)收集箱放置蔬菜。
2控制電路及傳感器部分
機身所包括的三塊控制板,兩塊為舵機控制板,一塊與六只機械腿相連,用于編寫并存放機器人行進過程中機械腿的動作與形態(tài),另一塊與采摘機械臂相連,用于編寫并存放機器人采摘過程中機械臂的動作與形態(tài),第三塊控制板為arduin0 2560,與兩塊舵機控制板相連接,用于編寫并存放機器人行進、調(diào)整、采摘的主函數(shù),控制線路板為自行設(shè)計的方便控制板、傳感器、電機等電路元件相連接的合理排布排針排母的電路板,供電電源分別為機械腿、傳感器和機械臂、視覺模塊供電。
傳感器排布板如圖2,其由14個灰度傳感器圍成一個80mmxlOOrnm的矩形檢測范圍的板子,其具體排布形式如圖2,單個灰度傳感器檢測區(qū)域的寬度約為8mm,會時時將地面規(guī)劃好的路跡反饋至主控板。
陀螺儀傳感器放置在機身上實時向主控板發(fā)送位置及速度信息,協(xié)同灰度傳感器共同工作,使機器人根據(jù)所反饋信息精準地按照預定軌跡行走。
3機器人具體工作流程
足式移動的果蔬采摘機器人在由白色24mm的反光條制成的預定軌跡上行走,根據(jù)多路傳感器反饋的信號情況,進行相應(yīng)調(diào)整使機身軸線始終與軌跡線重合,遇到由白色反光條構(gòu)成的十字標,會從前行狀態(tài)轉(zhuǎn)至立正姿態(tài),然后再通過多路傳感器反饋的信號情況,使機身形心盡量靠近十字標交點,然后執(zhí)行采摘,采摘完畢繼續(xù)前行,遇到轉(zhuǎn)彎相關(guān)標記則變化機械腿的姿態(tài)以另一種形式在轉(zhuǎn)完后的路跡上前行,整個機身不發(fā)生方位變化,在沒有十字標而有白色路跡線的停滯點的路線上,機器人根據(jù)陀螺儀所反饋的信息自動調(diào)整位置,使其沿預定軌跡行走機器人會根據(jù)視覺識別系統(tǒng)反饋的結(jié)果進行采摘,在沒有白色路跡線只有十字標的路線上,機器人會根據(jù)導航模塊按預先設(shè)定的路線行進,在十字標處停滯進行采摘。
4結(jié)語
目前果蔬采摘機器人多為輪式或履帶式機器人,但大多數(shù)實際采摘地地形不規(guī)則且崎嶇不平,輪式機器人和履帶式機器人的應(yīng)用受到限制。在這種背景下本設(shè)計方案中,足式移動的果蔬采摘機器人具有獨特優(yōu)勢,本設(shè)計方案解決在相對不平坦路面精確循跡和準確采摘果實或者蔬菜的問題。
參考文獻
[1]陳敏生,徐梓麒,肖鈺倫,姚偉林,潘嘉偉,毛星,王杏進,多足行走自動摘果機器人的設(shè)計[J].科學與財富,2018,(第13期).
[2]尹曉琳.六足仿生機器人步態(tài)規(guī)劃及其控制策略研究[D].哈爾濱工業(yè)大學,2013.
[3]丁凱,六足機器人仿生運動步態(tài)規(guī)劃與控制系統(tǒng)研究[D].東南大學,2016.
猜你喜歡
機械工程材料(2022年10期)2022-11-21 12:08:44
小學科學(學生版)(2021年9期)2021-11-02 05:26:46
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
建材發(fā)展導向(2019年13期)2019-08-24 06:37:40
電子制作(2018年14期)2018-08-21 01:38:14
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
筑路機械與施工機械化(2017年6期)2017-07-10 11:54:50
科技知識動漫(2016年8期)2016-07-29 20:40:09
