三維可視化系統應用
2019-09-17 08:28:10彭燕青董文煜吳德聰王佳琪
電子技術與軟件工程 2019年16期
文/彭燕青 董文煜 吳德聰 王佳琪
隨著數字城市、智慧城市的快速發展,三維空間技術在各領域得到了廣泛應用,逐漸改變了人們的生活方式。相比于二維空間技術,三維空間主要利用三維激光掃描技術進行三維空間數據的采集,構建三維場景,可給人們最直觀、真實的感受,給用戶展現更真實的地理空間關系。因此在三維空間技術的研究中,三維可視化技術是其中一項很重要的研究內容。關鍵因素在于三維模型的建立與三維空間數據的整合。通過三維激光掃描從而進行模型構建,同時利用數據庫進行空間數據整合,解決由于三維數據的來源廣泛、資料分散、時間跨度大、格式復雜等問題,從而實現真正的可視化管理。
1 三維空間模型的建立
1.1 三維激光掃描技術
三維激光掃描技術又稱實景復制技術,主要利用激光測距的原理,對實景進行大面積、高分辨率的采集。具有非接觸測量、采樣率高、高精度、高分辨率、環境適應能力強等優越性能,突破了傳統的測量方法,是快速建立物體三維模型的一種全新技術手段。該技術在安防、智慧城市、城建規劃等領域都有廣泛的應用。本系統主要利用Focus3D X330三維激光掃描儀對實景進行掃描,從而獲得點云數據。
1.2 三維模型構建
1.2.1 三維激光掃描及數據預處理
在進行實景掃描時,主要根據周圍環境選擇相應的測站點,布設標靶點,繪制一張點位分布圖并對測站編號,同時根據測站點架設掃描儀,進行實景三維激光掃描。但由于進行三維激光掃描時,因機器誤差、掃描盲區、環境、天氣、物體結構等因素,會導致獲取的點云數據存在一些噪聲點、空洞等,嚴重的影響點云數據拼接精度。而點云數據的拼接精度決定模型的精度,而且點云數據相對離散,因此點云數據的預處理至關重要。對點云數據的預處理流程主要包括點云配準、去噪、去濾波、壓縮等,進而獲取完整的三維點云數據。通過將不同站點掃描到的點云數據拼接在同一個掃描坐標系下,利用基于特征的配準算法,通過掃描物體的明顯特征來解算變換參數,并對所獲得的點云數據采取噪聲檢測與去除的研究設定,從而提高點云數據精度,使得數據拼接的誤差更小。
1.2.2 點云數據的拼接與模型構建
點云數據的拼接是點云數據處理的重要環節,拼接方法主要有基于標靶拼接、幾何特征拼接、控制點三維坐標拼接等。其中基于標靶拼接法是最簡便的拼接方法,也是目前市場上使用最多的一種。因此通過對點云數據預處理之后,將處理后的點云導入scene(Focus3D X330激光掃描儀配套點云數據處理軟件)軟件中,提取標靶點,利用標靶拼接原理,以其特征為基礎,進行定位管理,最后進行模型細節處理,從而拼接合并為完整的三維場景,實現掃描場景的三維重建。
1.3 三維建模方法比較
目前,市場上對三維模型進行構建的方式主要有:3Dmax、CAD、SCENE、點云數據三維實景、傾斜攝影建模等,它們各自都有自己獨特的優勢,部分比較如表1。
通過對以上市場上使用最多的幾種方法比較后,發現點云數據三維實景建模方式精度高、效果好、真實度高,點云數據拼接時間快,是目前建模的最佳選擇,唯一不足的就是點云數據采集時間長,模型格式需要轉化為3Ds等格式才能導入平臺進行使用。
2 基于三維空間信息的可視化系統設計
2.1 系統結構設計
系統主要基于B/S架構,結構采取多層分布式的結構,主要分為感知層、數據層、傳輸層、應用層。感知層包含各種感知終端,進行物體識別、信息采集,利用數據采集底板采集傳感器信息,并與監控對象相連。數據層則是各種采集的數據、地理信息以及三維模型數據等,從而實現空間信息數據統一管理,同時對采集底板采集上來的數據進行解讀和判斷。傳輸層則主要運用物聯網技術進行數據傳輸,通過通信模塊將解讀出來的數據發送到協調器中,從而傳遞給各PC端網關。應用層層則是系統等主要部分,以三維空間模型為依托,信息數據為紐帶,實現三維可視化平臺的呈現。系統結構如圖1所示。
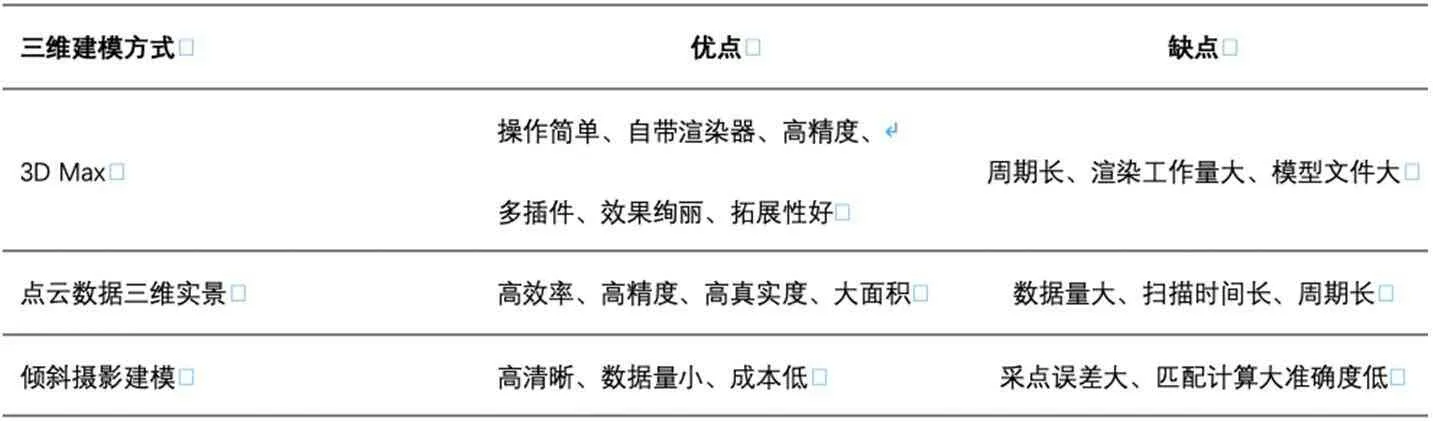
表1
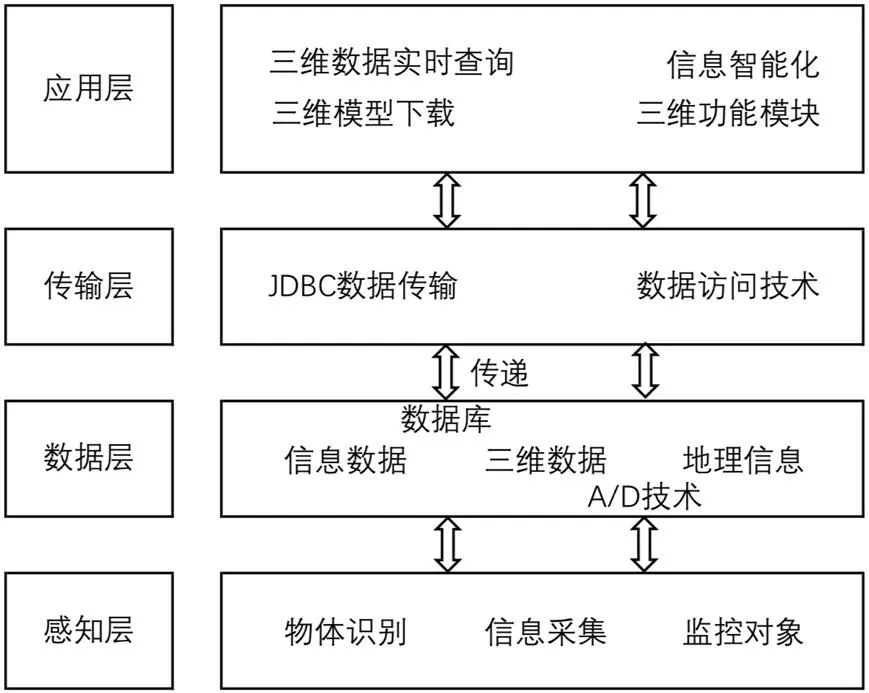
圖1:系統結構設計圖
2.2 數據采集模塊設計
本系統主要采用多個數據采集模塊相結合方式,從而實現數據的高效傳輸。其中大部分數據采集模塊主要由兩個部分組成,分別是:數據采集、數據處理。其中數據采集部分主要利用各種傳感器進行數據采集,通過無線網絡傳輸進入數據處理終端與計算機的存儲器中;數據處理部分主要就是將傳感器采集上來的數據進行A/D轉換,并將數據進行臨時存儲、處理;數據傳輸部分則主要通過無線網絡將數據傳輸進行系統協調器,從而實現數據的顯示。
2.3 信息數據無線傳輸設計
各種傳感器采集上來的信息數據經過處理后,傳輸進入協調器中,協調器講解析道道信息數據以無線網絡傳輸給相關網絡基站,基站以TCP/IP的處理方式發送給網關,網關再發送到后臺三維可視化系統,從而完成三維信息數據的傳輸。
3 基于三維空間信息的可視化系統實現
隨著三維空間技術研究和應用的不斷深入,二維世界已經無法滿足社會的需求,安防、建筑等相關領域對空間可視化的探索更為迫切,因此三維可視化系統的實現極大的實現了三維場景的交互和共享,信息數據的傳輸與分析。
3.1 模型自由導入與伸縮
通過采用激光掃描技術與三維模型構建技術,首先將掃描獲取的點云數據構建出場景三維模型,并將三維模型結構轉化為可視化平臺能夠識別的格式,主要為3ds、obj、mesh等格式,利用three.js庫里封裝了三維模型導入的接口,實現模型導入平臺之中,形成真實的三維景觀。將模型導入平臺之后,運用three.js特有的視角轉換技術,調用接口,實現視角的轉換與縮小,使其能與系統進行自由縮放。
3.2 空間數據同步
通過對三維可視化模型進行標注,添加一些矢量要素信息,并掛接在模型的相關節點上。同時,通過前端多結構化數據的對接,利用分布式數據采集獲取數據,將各種傳感器采集上來的數據,進行整理、轉化、修復、渲染,并將數據存儲進數據庫。最后通過PHP頁面鏈接數據庫,調用$id=$_POST[‘id’];函數,訪問數據庫文件,查詢相應數據并返回前段時間,從而實現數據的導入導出,使掛在模型節點上的相關數據實時顯示,達到數據同步,確保了可視化系統的全面與具體。
3.3 信息智能化
系統以三維空間模型為基礎,信息數據為紐帶,用PHP技術調用數據庫文件,將分布在空間的各種信息數據進行統一管理,使其可以能隨時對數據進行調用。推動空間數據向著集成化、動態化、智能化發展。同時利用各種大數據分析挖掘技術架構,對相關數據進行深度的分析與挖掘,實現動態預警、查詢等,達到真正意義的可視化、智能化。
4 結語
本文采用三維激光掃描、點云數據構建、物聯網等技術結合PHP、JavaScript、HTML程序設計語言的方式,利用三維空間模型與三位空間數據的交互,實現基于三維空間信息的可視化平臺。解決了信息數據量大、信息分散、傳輸時間跨度大等問題,給人一種身臨其境的感覺,實現了空間信息數據實時查詢、分析、全方位的監控與防護等。為智慧城市、小區安防、環境監控等領域提供了一種新的技術平臺。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
世界科學技術-中醫藥現代化(2022年3期)2022-08-22 00:32:50
云南化工(2021年8期)2021-12-21 06:37:54
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
海洋信息技術與應用(2020年1期)2020-06-11 12:43:56
數學物理學報(2020年2期)2020-06-02 11:29:24
傳媒評論(2019年4期)2019-07-13 05:49:14
中華手工(2017年2期)2017-06-06 23:00:31
光學精密工程(2016年6期)2016-11-07 09:07:19
中外會展(2014年4期)2014-11-27 07:46:46