基于動量的高速公路視頻檢測算法
2019-09-18 03:58:30余泳齊運書楊浩恩郭磊
中國科技縱橫 2019年14期
余泳 齊運書 楊浩恩 郭磊

摘 要:現如今,隨著監控系統的大面積覆蓋和計算機視覺的大規模崛起,視頻處理的重要性和必要性日益凸顯。交通由于大量視頻監控的存在和情況復雜人手相對不足等問題,對于視頻檢測的需求更加迫切,交通視頻檢測也是近幾年相關的研究的熱點問題。在交通問題中,高速公路更是其難點,我們根據其車速快,數據量大等特點,提出了基于動量的高速公路視頻檢測算法,其在保證了準確性的同時,還基本保證了實時性。
關鍵詞:高速公路;視頻檢測;動量;人工智能
中圖分類號:TP391 文獻標識碼:A 文章編號:1671-2064(2019)14-0017-02
0 引言
在高速公路中,出現異常情況一般需要盡快處理,恢復道路暢通,而眾多的視頻監控裝置,很難有足夠的人力去實時處理這些這些數據,所以視頻處理和檢測也是智慧交通的重要組成部分。在人工智能算法的影響下,現在基本可以保證識別的精準度,但是仍然存在著不能保證實時性,計算量大等問題。
為了解決這一問題,本文提出了基于動量的高速公路視頻檢測算法,在保證了算法準確性的情況下,大幅減少了計算量,保證其實時性。
1 算法概述
自AlexNet之后[1],深度學習算法一直以極高的精度霸占各類計算機視覺比賽的榜單,但是其在貢獻著最高的精度的同時也同樣有個更高的計算量要求,這使得落地變得比較困難。高速公路由于本身要保證車輛快速通行的特點對于實時性要求更高,這就與深度學習算法產生了矛盾。相比于深度學習算法,傳統算法計算量普遍小很多,但是精度就要低于深度學習算法。針對于高速公路的具體特點,為了平衡計算量和精度,本文假設:
(1)高速公路車輛不會無故停車;
(2)高速公路很少出現除車輛以外的移動物體。
由實際情況和交通法規我們知道這些假設合理,基于這個假設,我們提出基于動量的高速公路視頻檢測算法(Mome- ntum-based highway video detection algorithm,MHVD)。根據假設(1)我們可是使用動量去衡量移動車輛的存在,如果車輛保證高速移動,那么大概率不會出現各類事故。同時我們使用假設(1)判斷是否出現事故,并向工作人員發出信號。
2 算法設計
2006年,Hinton等人基于深度置信網絡(DBN)提出非監督貪心逐層訓練算法[2],隨后深度學習在各個領域都得到了大幅度的改進,特別是在圖像識別,語音處理等領域展現了里程碑式的大躍進。之后在目標檢測方向,Faster R-CNN[3],SSD等算法的提出為人工智能在實際生產中的應用帶來了更多可能[4]。Faster R-CNN在各種視頻圖像中取得很多優秀的結果,在交通領域也有著廣泛的應用[5-7]。本文中我們采用Faster R-CNN作為保障單元,使用動量保證在大多數時間中不會使用到Faster R-CNN算法,以此保證實時性。
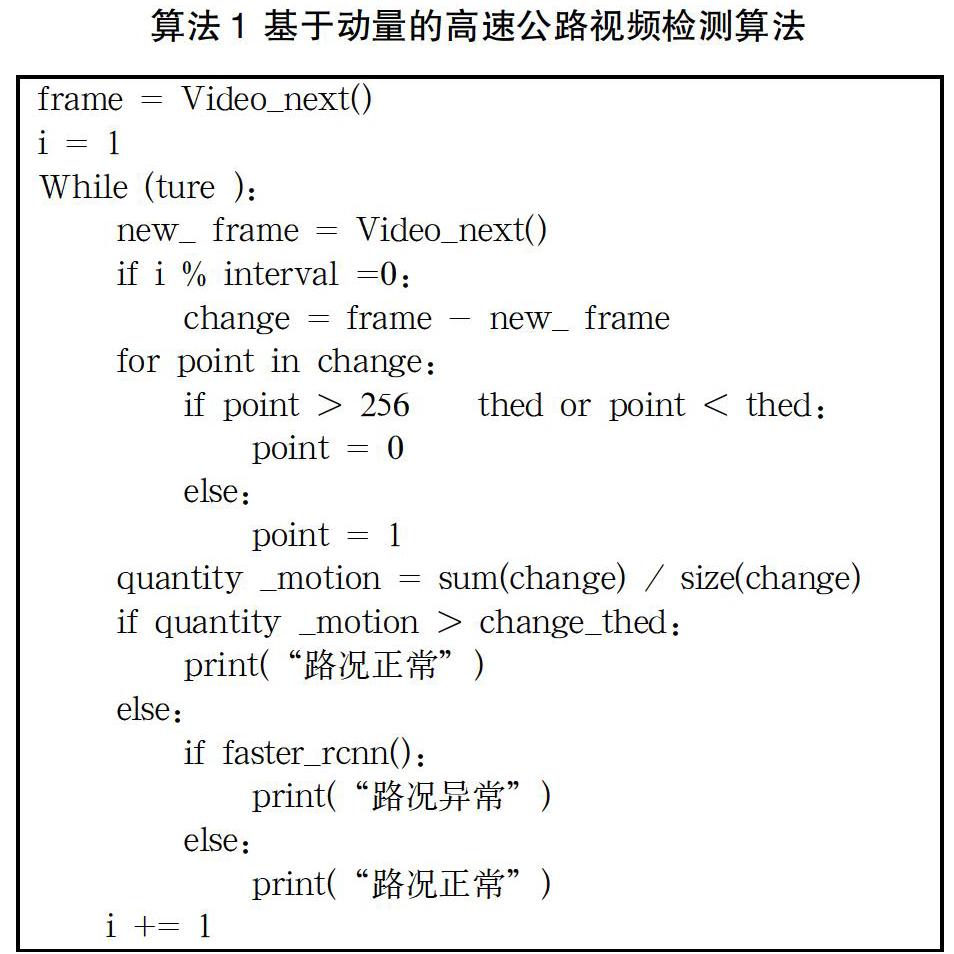
這里的動量不同于物理中的動量,而是用于表述由于位移產生的圖像差,由于其是在圖像意義下描述了運動,所以將其命名為動量。結合上一節中的兩個假設,我們設計算法如下:
3 性能評價
3.1 數據準備及測試
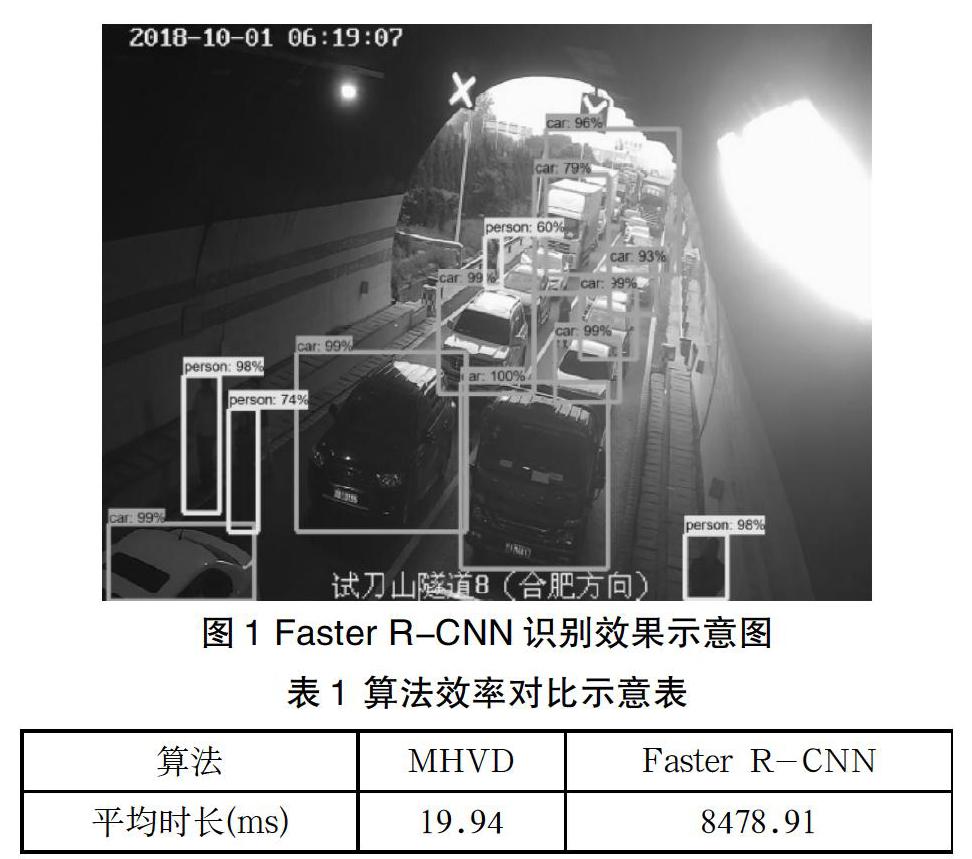
對于上一節的算法,thed 和change_thed相應的閾值,在我們的測試中取thed=20,change_thed=0.1。Video_next()是讀取下一幀的函數,faster_rcnn()是根據Faster R-CNN得到的交通情況的函數,這里我們使用Tensorflow的object _decetion庫中的faster_rcnn_inception_v2_coco模型并重新訓練后得到結果。這在各類相關論文中都能輕易得到Faster R-CNN在各類視頻圖像中的相關應用,在這里就不贅述了,效果如圖1所示。
本文得到試刀山隧道的相關監控視頻數據。于1996年建成并投入使用的試刀山隧道,左、右凈寬10米,原設計僅為雙向四車道通行。但是由于近年來交通量增加迅猛,特別是重大節假日期間,車流量更是持續高位運行,平均日交通流量突破6萬輛的試刀山隧道是擁堵等交通問題的頻發區,對于這類算法的需求更加迫切。我們選取堵車,正常行駛,無車輛行駛三種情況,抽取幾段視頻進行測試,測試結果為路況異常記為1,路況正常記為0。
如圖2所示,在三種情況中,本文算法都能很好地加以區分,在更多復雜路況中的效果也得到了很好的效果,在個別幀的誤報可以略微放大幀間距,或者多幀平均的方式處理,即采取一個滑動平均的窗口,對多個幀的輸出進行平滑處理,以此來防止個例的發生。
3.2 實時性測試
為了對比算法對于實時性地提升,我們對比了采用Faster R-CNN和只采用本文算法的程序運行時間,如表1所示,通過分析九組運行情況的平均值,我們發現MHVD在50幀基本能保證實時運行,而Faster R-CNN的實時性就難以保證,參考論文所給的處理速度為58ms和本文測試數據差距很大,原因是硬件成本投入不同,考慮分辨率和圖片大小,MHVD在視頻監控領域仍然有Faster R-CNN難以企及的實時性。
4 結語
人工智能算法在為我們帶來超高的準確率的同時,也帶來大量的資源要求,本文采用傳統的算法邏輯,提出了基于動量的視頻檢測算法,通過過濾掉大概率沒有出現各類異常的情況,避免了大量的計算量需要。
參考文獻
[1] Krizhevsky A,Sutskever I,Hinton G.ImageNet Classification with Deep Convolutional Neural Networks[J]. Advances in neural information processing systems,2012,25(2).
[2] G. E. Hinton,S. Osindero,and Y.-W. Teh. A fast learning algorithm for deep belief nets.Neural Comput.,18(7):1527-1554,July 2006.
[3] Ren S,He K,Girshick R,et al.Faster R-CNN:towards real-time object detection with region proposal networks[J].2015.
[4] Liu W, Anguelov D,Erhan D,et al.SSD:Single Shot MultiBox Detector[J].2016.
[5] 韓凱,張紅英,王遠,et al.一種基于Faster R-CNN的車輛檢測算法[J].西南科技大學學報(自然科學版),2017,32(4):65-70.
[6] 桑軍,郭沛,項志立,等.Faster-RCNN的車型識別分析[J].重慶大學學報,2017,40(7):32-36.
[7] 韓凱,張紅英,王遠,et al.一種基于Faster R-CNN的車輛檢測算法[J].西南科技大學學報(自然科學版),2017,32(4):65-70.
猜你喜歡
西安航空學院學報(2022年2期)2022-07-04 07:45:42
建材發展導向(2021年20期)2021-11-20 05:43:18
商界(2019年12期)2019-01-03 06:59:05
IT經理世界(2018年20期)2018-10-24 02:38:24
小學閱讀指南·低年級版(2017年11期)2017-12-06 15:14:59
小康(2017年16期)2017-06-07 09:00:59
南風窗(2016年19期)2016-09-21 16:51:29
南風窗(2016年19期)2016-09-21 04:56:22
中國交通信息化(2016年9期)2016-06-06 07:42:10
小說月刊(2014年4期)2014-04-23 08:52:20