基于改進局部方向模式的紋理分類
2019-09-19 09:38:40
測控技術 2019年6期
(河南理工大學 計算機科學與技術學院,河南 焦作 454150)
在圖像分析領域內,局部二值模式算子(Local Binary Pattern,LBP)[1-2]是具有代表性的是一種紋理描述算子,并且LBP計算復雜度低,對圖像旋轉、局部灰度小的變化具有較好的魯棒性。但是,LBP算子對噪聲及光照較為敏感,為此,Jabid等人融合局部邊緣信息提出局部方向模式(Local Directional Pattern,LDP)[3-4]。為了增加邊緣梯度信息的方向性,Zhong等人提出了增強局部方向模式(Enhanced LDP,ELDP)[5]。這兩種算子對圖像光照變化和低噪情況等具有更好的魯棒性。
在此基礎上,多種針對LDP的擴展方法被提出,Castillo提出了LSDP(Local Sign Directional Pattern)算子[6],該算子采用六位二進制碼表示紋理和灰度變化信息,不但可以更好地突出主方向信息,標記區分具有不同強度變化的類似結構模式,而且也可以識別更多微小的像素變化,得到更為詳細的紋理特征。Rivera等人提出把主方向和前兩個主要方向的強度差編碼成一個數,對其主要方向所表示的鄰域的突出紋理信息進行編碼,提高了對光照和噪聲的魯棒性[7]。Ryu提出了一種新的編碼方案——局部定向三元模式,消除定向模式在平滑區域產生的不確定性,利用方向信息描述顯著部位與非顯著部位信息,可以有效描述更多面部特征,整體識別分類性能較好[8]。
然而,上述LDP及其擴展方法在進行模式劃分時,往往采用剛性劃分方法,為此首先在方向模式的定義中引入模糊邏輯,并定義了模糊局部模式(Fuzzy Local Pattern,FLP),并基于該模式對傳統LDP及其相關方法進行擴展;其次,在定義局部方向模式時,為進一步消除噪聲影響,將傳統的3×3鄰域進行擴展,定義了新的局部鄰域拓撲結構。在實驗中,選擇在紋理分析領域廣泛應用的3個紋理庫UIUC[9]、Curet[10]和Outex[11]作為實驗數據庫,采用LDP和ELDP算子作為實例,來驗證新方法的分類效果。實驗結果證明了本文方法可以有效提高傳統LDP算子及其擴展算子的分類能力。
1 相關算子介紹
1.1 局部方向模式算子(LDP)
在局部二值模式的基礎上,Jabid等人融入邊緣特征信息,提出局部方向模式算子(LDP)[3-4],其原理是:將原來圖像的3×3鄰域與Kirsch模板[12]進行卷積運算(圖1給出了Kirsch的八方向模板),得到邊緣響應值,然后將響應值中絕對值前k大的值所在的位置設為1,其他位記為0,組合得到的二進制值即為該鄰域的LDP值。其定義如下:
(1)
式中,

mi為與Kirsch模板卷積運算后得到的邊緣梯度值;mk為第k大的邊緣梯度值。圖2給出了LDP的計算實例。

1.2 ELDP
在LDP的基礎上,Zhong等人提出了增強局部方向模式[5],其基本原理是:首先將3×3鄰域與Kirsch模板卷積,然后取最大和次大邊緣梯度值所對應的方向,得到兩位八進制數,最后將該八進制數轉換為十進制數,即為ELDP值。其定義為
ELDP(xc,yc)=8bi+bj
(2)
式中,bi為獲得最大邊緣檢測返回值的鄰域像素點所在方向的編碼;bj為獲得第二大邊緣檢測返回值的鄰域像素點所在方向的編碼。圖3給出了ELDP的計算實例。

圖3 ELDP計算示例
2 基于模糊邏輯的局部模式
對于LDP及其擴展方法在定義方向模式時,往往都采用剛性的劃分方法,某一鄰域僅屬于其中的一種模式,因此局部灰度的微小變化或由于噪聲的影響,會導致相似局部鄰域被劃分到完全不同的模式。為了解決該問題,引入了模糊邏輯理論,該理論已在局部二值模式中得到了應用[13-14],并取得了較好的效果。
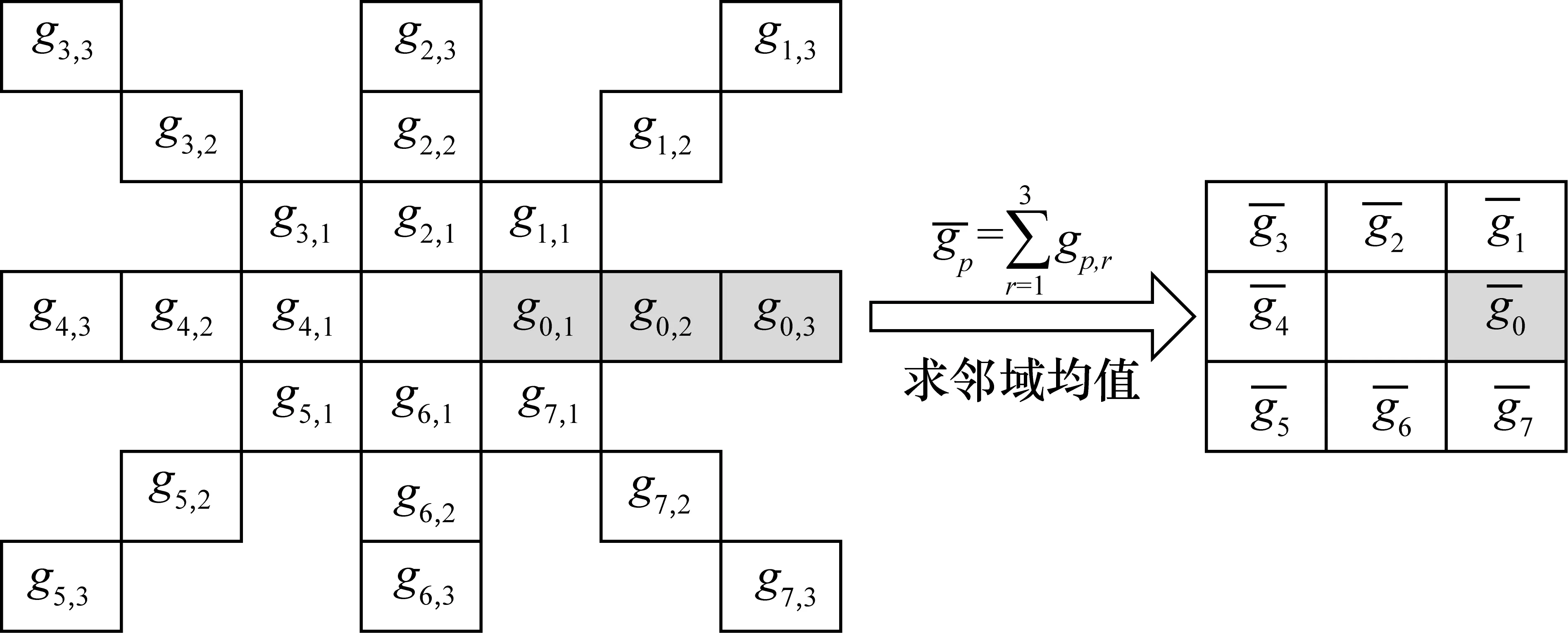
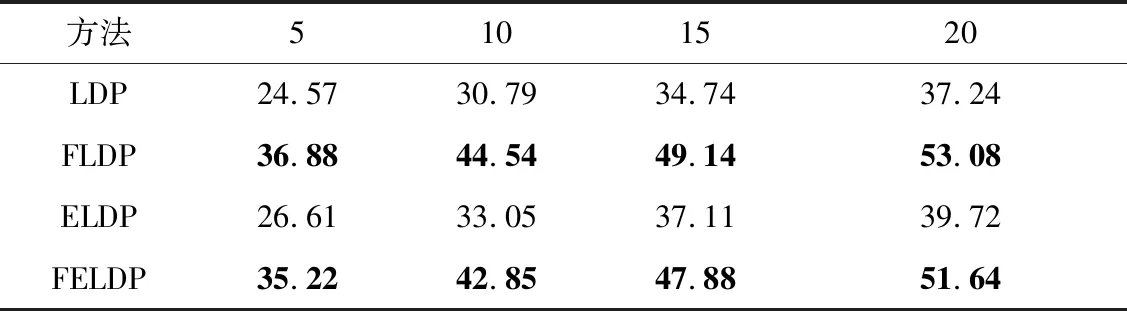
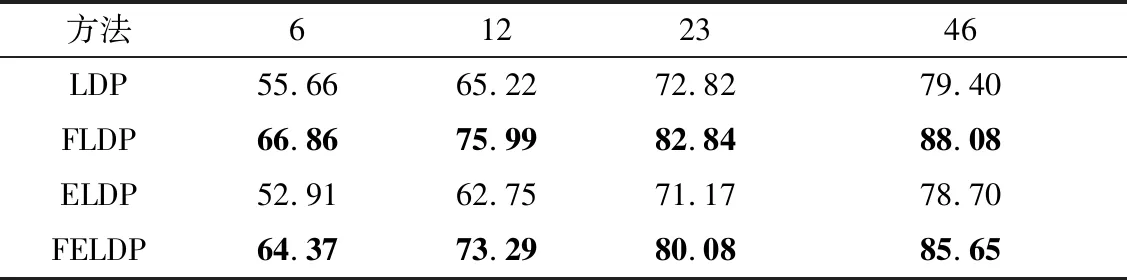
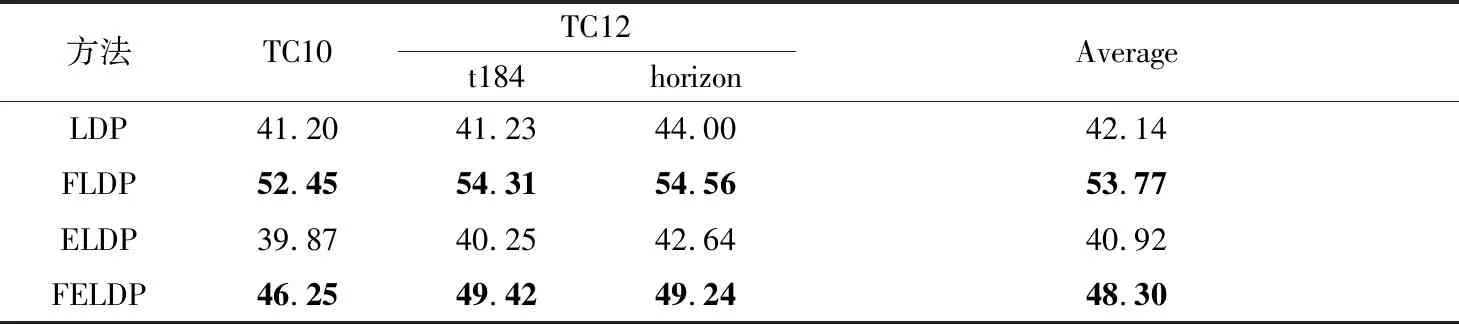
設Rm為3×3鄰域局部方向模式的最大值,Rc為鄰域中心像素的局部方向模式值,Ri(i=0,1,2,…,7)為鄰域內其他像素的局部方向模式值,集合B與集合S為滿足特定條件的局部方向模式值的集合,t為閾值(t∈[0,Rm])。若Rc+t 模糊集B及其隸屬度關系可以用以下的序數對表示: B={Ri,μB(Ri)|Ri∈H} (3) 式中,μB為屬于集合B的隸屬度函數;H為局部鄰域所有模式集合。同理,集合S的隸屬函數表示為 S={Ri,μS(Ri)|Ri∈H|} (4) 式中,μS為集合S的隸屬函數。 設d=Ri-Rc,對于集合B的隸屬函數μB定義為 (5) 相對應地,集合S的隸屬函數μS定義為 μS=1-μB (6) 基于隸屬函數μS和μB,可以基于式(7)計算中心像素隸屬于不同集合的概率。 (7) 圖4 FLDP計算示例 對于傳統的LDP及其擴展算子,其采用的局部拓撲結構均為3×3鄰域,進一步對原拓撲結構進行拓展,定義了圖5所示的局部鄰域結構,其基本思想是采用8-方向上相鄰的若干個像素的灰度均值代替原定義中單個像素的灰度均值。該拓撲結構具有兩個主要優點:① 采用灰度均值可以進一步消除噪聲影響;② 將3×3鄰域擴展到更大區域,可以在更大的尺度下描述局部紋理特征。 設gp,r分別代表方向p中第r個像素的灰度值,r=1,2,3,…,s,p=0,1,2,…,7。則相應的灰度均值計算公式為 (8) 圖5給出了當s=3時的計算示例。 圖5 s=3時鄰域灰度計算示例 為了驗證所提出算法的有效性,選取LDP與ELDP算子作為實例,經本文方法改進后的描述算子記為FLDP、FELDP;同時選擇UIUC、Curet以及Outex 3個在紋理分析領域廣泛應用的圖像庫作為測試庫。同時,實驗選擇χ2距離計算特征間的相似性,采用K-近鄰方法進行分類。 首先,測試了所述的4種算子針對圖像的描述效果,如圖6所示。從圖6中可以看出,相對于LDP和ELDP,本文的FLDP和FELDP算子可以更好地保留紋理特征信息,更有利于描述圖像的紋理信息。 圖6 不同算子特征示例圖 對于UIUC圖像庫來說,該庫包含25類紋理,每一類有40張640像素×480像素大小互不重疊的圖像,實驗中在每類紋理中隨機挑選N張圖片作為訓練集,N的取值分別為5、10、15和20,剩下的40-N張圖片作為測試集,并且重復做50次實驗。各種方法分類效果如表1所示。 表1 針對UIUC圖像庫的分類準確率結果 單位:% 由表1可以看出,在訓練集N取值為5、10、15、20的情況下,FLDP算子的分類準確率分別比LDP提高了12.31%、13.75%、14.4%、15.84%; FELDP算子的分類準確率分別比ELDP提高了8.61%、9.8%、10.77%、11.92%。 對于Curet圖像庫來說,該庫包含61類紋理,每一類有92張200像素×200像素大小的圖片,圖像之間存在旋轉、光照的變化。實驗中,在每類紋理中隨機挑選N張圖片作為訓練集,N的取值為6、12、23和46,剩下的92-N張圖片作為測試集,并且重復做50次實驗。表2給出了實驗結果的對比。在訓練集N取6、12、23、46的情況下,FLDP算子的分類準確率分別比LDP提高了11.2%、10.77%、10.02%、9.04%;FELDP算子的分類準確率分別比ELDP提高了11.46%、10.54%、8.91%、6.95%。 表2 對Curet圖像庫的實驗結果 單位:% 對于Outex圖像庫,包含24類紋理,每一類紋理有9個角度的圖像,旋轉角度分別為0°、5°、10°、15°、30°、45°、60°、75°、90°,每個角度有20張不重疊的圖像,這些圖像是在3種光源下成像,分別是“horizon”、“inca”、“t184”。在此數據庫中,有Outex_TC_00010(TC10)和Outex_TC_00012(TC12)兩種測試集,前者是用于測試圖像旋轉不變特性,后者用于研究光照和旋轉均不變的特性。對于TC10數據庫來說,訓練樣本中每一類紋理以光照“inca”光源、0°旋轉角的20個圖像為訓練集,其他的8個角度圖像作為測試集,因此本數據庫共有480個訓練樣本和3840個測試樣本。對于TC12數據庫,訓練樣本和TC10的“inca”光源、0°旋轉角的20個圖像一樣,測試樣本為光源“t184”或“horizon” 下的圖像,因此本數據庫有480個訓練樣本和4320個測試樣本。 表3 針對Outex圖像庫的實驗結果 單位:% 表3給出不同方法的分類效果,可以明顯看出,在同種條件下,FLDP、FELDP算子的平均分類準確率分別比LDP和ELDP算法高11.63%、7.38%。 最后,實驗針對TC10圖像庫,比較了4種方法的特征提取的時間復雜度。在相同的實驗環境下,LDP、FLDP、ELDP、FELDP這4種方法特征提取平均時間分別為0.92 s、1.88 s、0.83 s、1.71 s。本文改進算法由于拓撲結構及劃分方法的精確性,特征提取時間復雜度高于傳統方法,但分類效果得到明顯提升。 從兩個方面對傳統局部方向模式及其擴展方法進行了增強處理,首先引入了模糊隸屬度函數,以解決傳統的剛性模式劃分方法;其次,將原始的3×3鄰域擴展到了多分辨率的局部鄰域。新方法一方面提高對局部方向模式劃分的準確性,提高了其分類能力;另一方面,在新定義的拓撲結構下,既可以提取局部鄰域的微觀紋理信息,也可提取相對宏觀的紋理信息,提高了對紋理描述的全面性。采用在紋理分類領域廣泛應用的UIUC、Curet和Outex紋理圖像庫進行試驗,結果表明新的方法可以顯著提高紋理圖像的分類效能。

3 實驗結果

4 結束語
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46