基于溫度補償傾角傳感器的雙軸穩定平臺設計
2019-09-19 07:33:40
測控技術 2019年6期
關鍵詞:信號
(連云港杰瑞電子有限公司,江蘇 連云港 222006)
艦艇在風浪作用下出現搖擺狀態,造成艦載設備如光電、紅外的視軸晃動,嚴重影響光電設備對目標的跟蹤測量,無法發揮其跟蹤目標的作用。為準確跟蹤目標,減小載體運動帶來的擾動誤差,需要設計一種穩定系統將艦載設備與船體擾動相隔離,消除艦艇搖擺對艦載雷達瞄準目標的影響。目前穩定平臺主要有兩種方法[1]:一種是采用機械穩定方式,用反方向搖擺克服艦艇的縱搖和橫搖,為設備提供近似平穩的平臺,這種方法對艦載設備和系統無特殊的要求,因此使用方便;另一種方法是通過對艦艇縱搖和橫搖數據的測量,用軟件對艦載設備捕捉的信號進行補償,達到穩定的效果,這種方法通常由于受設備的視場限制,補償的角度范圍較小[2]。
本文研究基于反方向運動抵消艦艇搖擺運動的機械穩定平臺技術。根據船上的導航設備,如平臺羅經或方位水平儀等,提供艦艇搖擺角信號,建造一個穩定平臺隔離船舶的搖擺。即載機姿態變化后,首先帶動平臺發生姿態變化,陀螺感受到這種變化后,輸出控制設備的視軸相對于慣性空間的偏轉信號,經放大處理,驅動力矩電機產生抵消艦載姿態變化的運動,即隔離載機姿態變化。其關鍵技術是高精度的傾角測量及電機控制方法[3]。采用溫度補償MEMS傾角傳感器設計了基于ARM的高精度溫度補償電路,傾角精度達到0.1°。采用無超調電機控制方法提高控制系統的響應速度,實現平臺的高低、方位的雙軸穩定控制,能夠在動態狀態下,具有高低、方位穩定功能,穩定范圍指標:方位回轉范圍為n×360°,高低俯仰范圍為-20°~+20°。
1 穩定平臺技術
穩定平臺功能主要由高低和方位傾角儀、高低和方位力矩電機及控制系統實現[4]。當艦體有角度運動時,利用傾角儀測量運動趨勢,在負載軸上施加反向轉動力矩,保持平臺高低向、水平向穩定。該系統由與艦艇橫搖、縱搖方向分別平行的兩個軸系組成,每個軸系由一套力矩電機、姿態測量儀和驅動器構成閉環角度控制系統,當艦艇橫搖或縱搖角度發生變換時,由姿態測量儀感應出該角度,反饋給驅動器,產生與艦艇搖擺角度相反的驅動信號,用以控制電機反向旋轉來抵消艦艇搖擺。
穩定平臺系統的結構形式上采用外軸方位、內軸俯仰的安裝方式,底座內部裝有姿態傳感器和功率驅動電路,通過精密軸承與方位電機連接,俯仰方向電機通過軸承與負載安裝臺面連接,電機另一端裝有限位機構、電磁鎖定裝置。穩定平臺的結構示意圖如圖1所示。
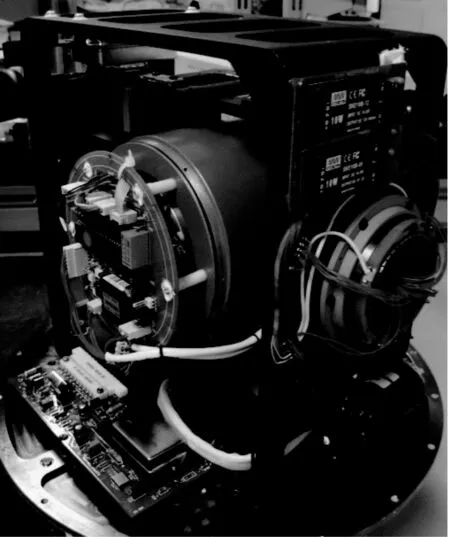
圖1 穩定平臺結構示意圖
控制組件電路包括如下部件:① DSP控制單元,其主要功能是通過UART口接收控制臺的控制指令和參數,并輸出當前高低和方位的數字角度;② A/D轉換單元,其主要功能是將傾角儀反饋的轉角模擬電平轉換成數字量,送入DSP的SPI串行接口;③ 轉臺當前角度信號的測量和數字化轉換模塊,它將此角度量反饋給DSP控制器,與命令角度位置比較后做出控制調整。
其中方位向工作原理框圖如圖2所示,高低向的控制原理與方位向相同。
2 MEMS傾角傳感器
由于平臺不可避免地受到外部的干擾,這些干擾

圖2 穩定平臺控制框圖
基本是隨機的,使系統的穩定精度降低,導致系統的性能變差,因此使用MEMS傾角傳感器ADXL203來測量平臺相對慣性空間的失調角運動,為平臺控制電機的轉動消除失調角提供依據。
ADXL203傳感器內部放置可在X和Y方向上做微小位移的、對重力敏感的質量塊,當X-Y平面與地平面平行時,在任一方向上的傾斜都會引起質量塊在該方向上的重力分量的敏感輸出[3]。輸出信號經過內部電路的信號調理,得到一個和傾斜角度成正比的模擬電壓信號。根據輸出的模擬電壓信號的大小,可知質量塊在該方向上受到的重力分量,進而可求得傾斜的角度。
在靜態下,設傳感器的質量為m,重力加速度為g,若傳感器的X(或Y)軸轉角度為θ,則受到的重力加速度分量gx為
mgx=mgsinθ
(1)
θ=arcsin(gx/g)
(2)
由式(2)即可求得傾斜角度,ADXL203的輸出電壓與每軸受到的重力成比例,當分別為g和-g時,輸出的模擬電壓值為3.5 V和1.5 V。當傳感器工作在動態加速度下,利用X軸與Y軸相互垂直的特點,與運動面分別成45°和135°夾角,使產生的加速度量因大小相等、方向相反而抵消[5]。
由于傾角傳感器ADXL203在-40~125 ℃溫度范圍內具有±0.3%的靈敏溫度性[6],故需要溫度校正。通過實驗,將傾角傳感器安裝在轉臺上,設置轉臺的角度為10°,然后每隔10 ℃,在-40~+100 ℃測出傾角傳感器MEMS的溫度特性[7-8]。經過測試,傳感器的溫度變化率近似為0.006°/℃。然后,采用分段線性差值方法,采用ARM處理器對MEMS的數據進行溫度補償。圖2為傾角測量儀的結果。從結果可以看出,在溫度-40~+100 ℃范圍內,經過溫度補償的傾角測量儀的輸出變化為0.03°,而沒有溫度補償的變化為0.9°。因此,測量精度提高了30倍,精度達到0.3%。
3 電機驅動技術
穩定平臺伺服工作狀態主要要求精度高,響應快,運動平穩性好。而直流電機輸出力矩大,轉速和轉距波動小,調節特性和機械線性度好,可工作在連續堵轉狀態,特別適用于要求控制精度高的平臺位置系統。穩定平臺采用永磁式直流力矩電機作為方位、高低方向的執行元件。伺服電機及驅動器安裝在托架的內部,使臺體結構緊湊和密封。根據平臺系統性能指標,電機選用J110LYX01H型永磁式直流力矩電機。由選用的電機參數,可以計算得到如下系數[9]。
電樞回路電磁時間常數Tl為
(3)
額定勵磁下電動機的轉矩電流比Cm為
(4)
電勢系數為
(5)
理想空載轉速為
(6)
電機自身的摩擦力矩為
(7)
根據nio和Tmbl可以畫出該電機在Um=28 V時的機械特性,如圖3所示。再由Tcbl作它的平行線,即對應連續堵轉的機械特性,它對應的空載轉速為
(8)

圖3 110LYX01H型電機機械特性曲線
為了實現帶負載的位置控制,在帶動負載的時候,電機的轉速為零,此時電機處于堵轉狀態,所輸出的力矩就是堵轉轉矩。由機械特性曲線可以看出:
① 當n= 0時,機械特性曲線上的點對應的是堵轉轉矩,如圖3中Td所示;
② 在不同的電樞電壓下,電機的堵轉轉矩不同,而且這兩者是呈一定線性關系的,其關系為
(9)
由此可見,利用改變電樞電壓的方法,可以實現對電機堵轉轉矩的控制,從而實現帶負載的角度位置控制。
③ 最后還需要檢驗執行電機能提供的響應頻率ωK,能否符合系統動態性能的要求,對力矩電機而言,輸出力矩不能超過Tmbl,作為系統的執行電機所能提供的響應頻率ωK為
≈57.49(rad/s)
(10)
系統開環截止頻率為
1.4ωc=18.7~31.1(rad/s)
由于ωK≥1.4ωc,所以J110LYX01H型永磁式直流力矩電機作為執行電機能滿足系統的動態性能要求。
控制系統采用兩軸三環的控制方案,即方位和高低方向上分別由模擬電流環、模擬速度環、數字位置環構成多閉環。總體控制模型為三環控制系統,其中模擬電流環、模擬速度環由功率驅動器模塊實現,而數字位置環是系統設計的重點,主要通過DSP控制器來實現。
在本系統中,位置信號作為位置環的輸入信號,速度信號作為速度前饋信號加入位置環路。速度前饋的作用是減小微分增益或者測速發電機環路阻尼所引起的跟蹤誤差。它將一個與電機要求的轉速成比例的量增加到控制輸出上。前饋濾波時間常數的選取可根據實際伺服系統所選定的加減速時間而定,一般二者變化趨勢相反,通常應大于或等于采樣時間的1/2,本工程中取為0.02。
在系統中加入了前饋后,很好地解決了一般反饋控制系統中減少誤差與保持穩定性之間的矛盾,且由于前饋控制的引入使原反饋系統的技術要求可適度降低,控制效果非常好。但也引入了噪聲,須加濾波器進行處理。復合控制可以減小系統的動態滯后誤差,提高系統的跟蹤精度。

圖4 溫度補償測試曲線
4 穩定平臺實驗結果
穩定平臺伺服控制系統實現位置伺服的過程如下:DSP通過端口采樣來自傾角儀的θ,經過解算并得到控制信號,然后送給D/A轉換電路,轉換后的模擬信號送給伺服驅動器的輸入端,驅動電機運轉,從而使負載達到穩定狀態。
采用上述控制方法,雙軸穩定平臺的實驗結果如下。
① 角速度:最大40°/s,最小0.1°/s;
② 角加速度:最大57°/s2;
③ 穩定平臺指向復示精度(均方值):高低和方位均為0.1°;
④ 穩定平臺工作范圍:方位回轉范圍為n×360°,高低俯仰范圍為-20°~+20°。
圖5為最大跟蹤加速度仿真曲線。最大跟蹤加速度為57°/s2,采用正弦輸入信號(θ=Asin(ωt))。根據角度求導為速度、速度求導為加速度可知,最大加速度為Aω2,設定幅值A=57°,那么應有角速度ω=1。由圖5可知,跟蹤效果良好,最大跟蹤誤差出現在最大跟蹤加速度處,即正弦波形的波峰,由圖5測得平臺觀瞄方向最大加速度誤差值為0.079°=1.3×10-3rad。

圖5 最大跟蹤加速度仿真曲線
觀瞄方向的最大跟蹤轉速曲線如圖6所示,任取輸入曲線上的兩點可計算得到轉速為V=(-15.2-(-35.2))/(78.83-78.33)=40°/s,誤差值為0.043。
5 結束語
本文研究了基于機械穩定平臺的技術,實現高低、方位的雙軸穩定平臺。采用溫度補償方法,提高傾角MEMS傳感器的精度,采用直流電機無超調控制技術,提高系統快速響應和跟蹤速度,提高穩定平臺的高低、方位動態響應速度。實現雙軸穩定平臺,能全方位或在指定的區域內監測海上、岸上目標。

圖6 最大跟蹤轉速曲線
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06