雙路掃描式激光測徑儀系統設計
2019-09-20 00:39:16唐立軍吳定祥34五凌電力有限公司近尾洲水電廠湖南長沙40004長沙理工大學物理與電子科學學院湖南長沙404長沙億旭機電科技有限公司湖南長沙40000近地空間電磁環境監測與建模湖南省普通高校重點實驗室
測控技術 2019年5期
唐立軍 吳定祥34(.五凌電力有限公司近尾洲水電廠湖南 長沙 40004; 2.長沙理工大學 物理與電子科學學院湖南 長沙 404; 3.長沙億旭機電科技有限公司湖南 長沙 40000; 4.近地空間電磁環境監測與建模湖南省普通高校重點實驗室
湖南 長沙 410114)
激光測徑系統是一種測量工件外徑的測量儀器,它具有速度快、精度高和非接觸性測量等特點,被廣泛用于各類線纜、棒材、光纖及漆包線等線材的外徑測量。根據光的路徑不同,將測徑系統分為單路測徑系統和雙路測徑系統。單路激光測徑系統采用一路光束掃描被測工件,應用于圓形管材的直徑測量,因此檢測范圍存在很大限制;而雙路測徑系統在單路的基礎上增加一路光束,擴大了測量范圍,不僅滿足單路激光測徑系統的需求,也能測量方形、扁平形管材的尺寸數據。當前國內單路測徑技術比較成熟、光路結構簡單,實際應用較多,而雙路激光測徑系統因光路復雜,應用難度大,相關研究較少報道。
本文根據生產實際需要,探索雙路激光測徑方法,設計穩定的雙路激光測徑系統,實現對扁平形漆包線的測量。
1 雙路掃描式激光測徑原理
雙路掃描式激光測徑系統框圖如圖1所示,該測量系統包括光學采集系統和數據處理系統。光學采集系統由激光發射管、直流電機、八棱鏡、光學分束鏡、聚光透鏡及光電傳感器等組成。數據處理系統由光電信號處理模塊、控制器CPU處理模塊、數據通信模塊和測量顯示模塊組成[3]。由激光發射管射出的點光源通過光學分束鏡產生垂直和水平兩路光束,光束掃射到轉動的八棱鏡上將點光源轉換為掃描光束,然后通過透鏡形成平行光。被測工件放置在平行掃描區域內,光束對其進行自上而下的掃描,最后形成的光信號聚焦到兩個光電傳感器中心接觸面[4]。光電信號處理模塊將光信號轉換為電信號進行傳輸,控制器CPU對接收的電信號進行信號處理,計算得出工件兩個面的尺寸。
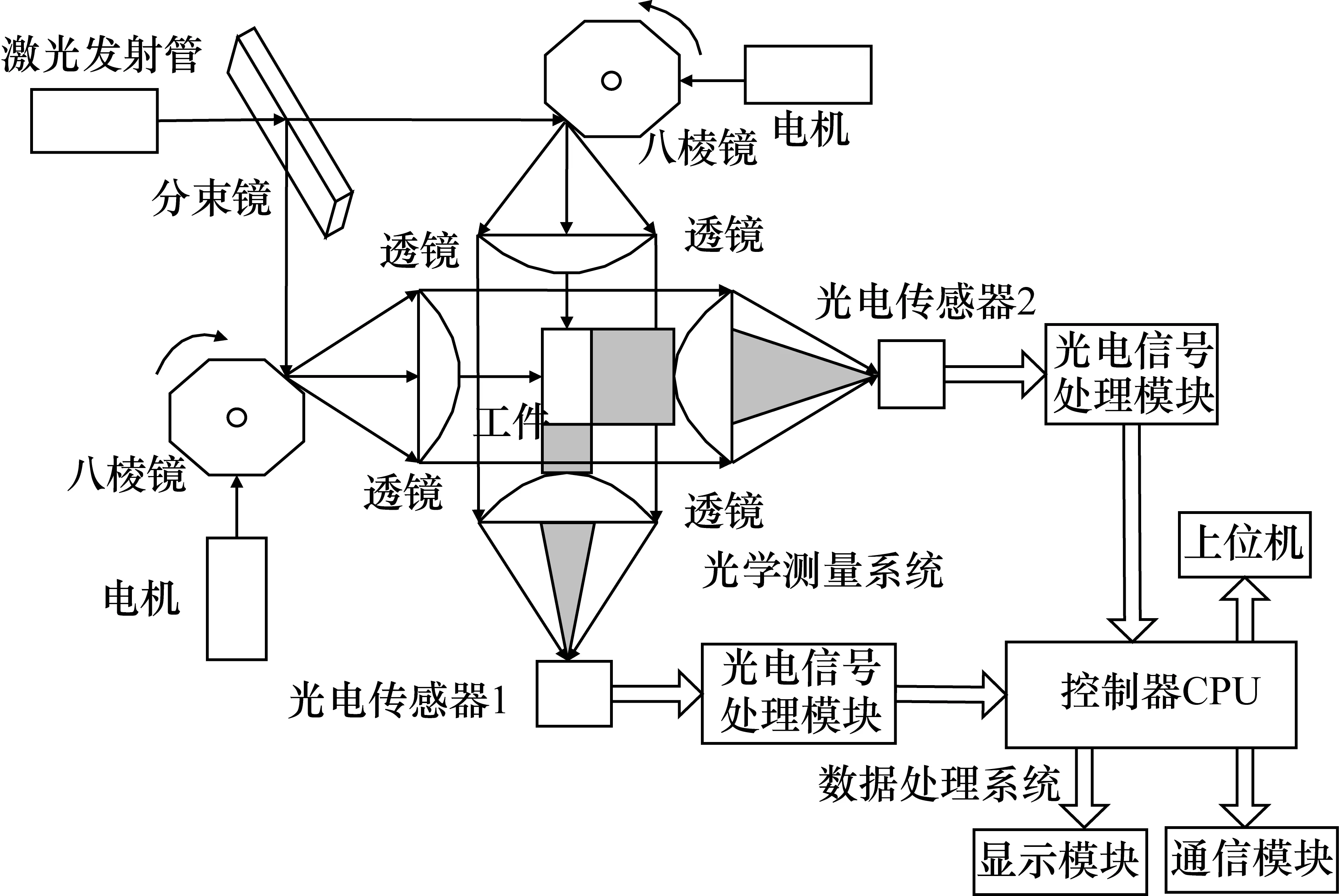
圖1 雙路掃描式激光測徑系統框圖
光電傳感器將光信號轉換為電信號,根據光電傳感器的特性知光被工件遮擋部分輸出低電平信號,而未被遮擋部分輸出高電平信號。因此需要采集一個周期內被擋工件低電平的時間,再由光束掃描速度即可得出其測量尺寸[4]。設激光束自上而下的掃描速度為U,被測工件的尺寸為L,一個周期內低電平脈沖寬度為T,根據光的幾何原理知:
L=U×T
(1)
U=W×f=4πnf
(2)
式中,n為電機轉速;W為反射光束角速度;f為透鏡焦距。由式(1)、式(2)得被測工件尺寸
L=4πnf×T
(3)
由式(3),當電機勻速轉動后,得到穩定的平行光束掃描到待測工件表面,從而計算工件的尺寸[4]。電機轉速波動越大,則測量尺寸誤差越大,因此為了減少速度波動引起的測量誤差,本文測徑系統應用標準棒法原理對采集數據進行處理,將被測工件尺寸與標準尺寸進行對比計算,消除速度產生的誤差。如圖2所示:設電機掃描速度為U,掃描區域內被測工件的尺寸為L1,標準棒的尺寸為L2,被測棒遮擋產生的低電平脈沖寬度為T1,標準棒產生的低電平脈沖寬度為T2。
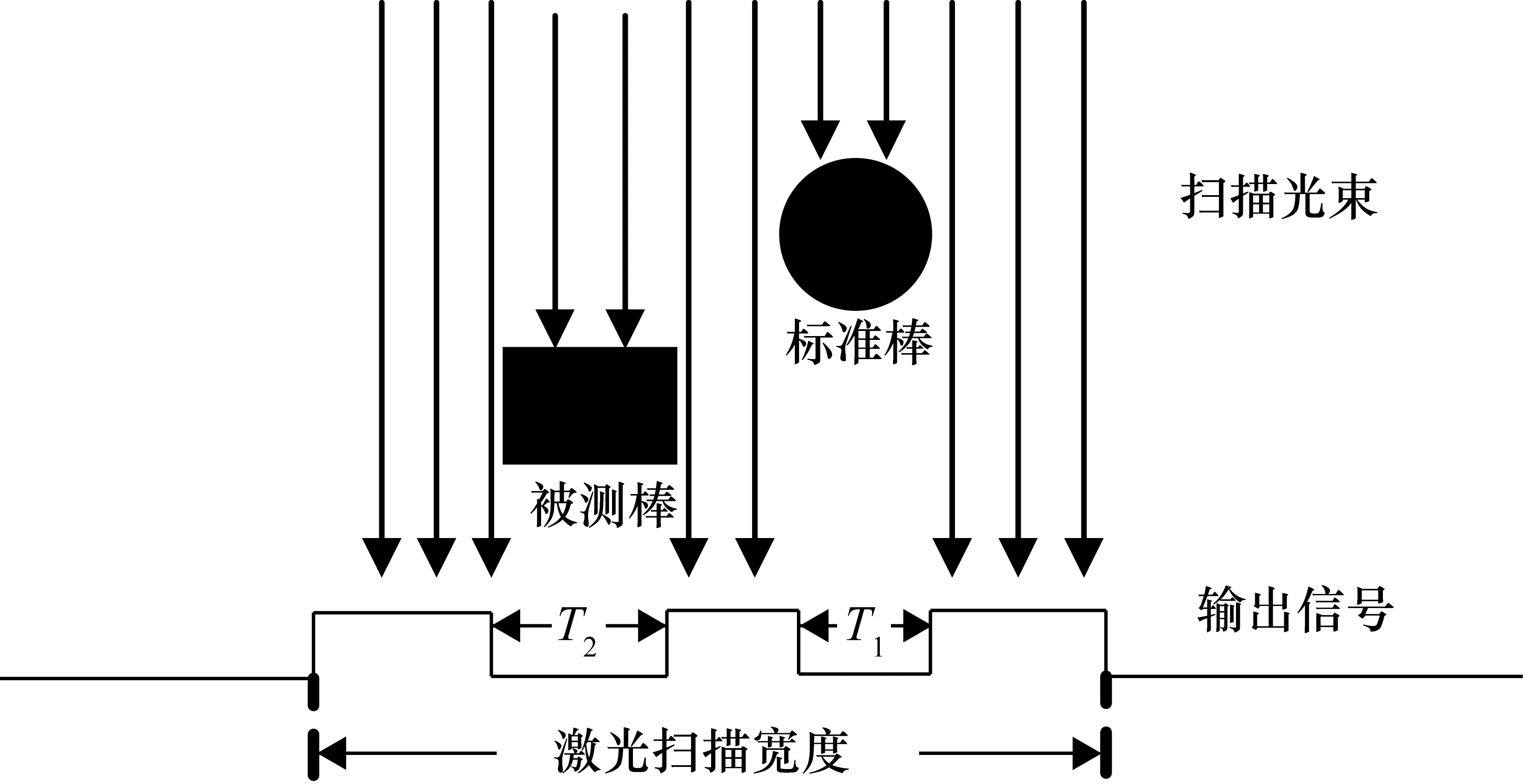
圖2 標準棒法測徑原理
由測徑儀原理知
L1=U×T1
(4)
L2=U×T2
(5)
根據式(4)、式(5)得被測工件尺寸
(6)
從式(6)得出,應用標準棒法測量工件尺寸能消除電機轉速造成的誤差;使用單一激光器結合分束鏡得到雙光束的方法,可大大提高工件測量精度和穩定性。
2 系統硬件設計
本文硬件設計由五大模塊構成:雙路光學測量模塊、通信模塊、數據顯示模塊、電源模塊及控制器CPU處理模塊,其中核心模塊為控制器CPU,采用ARM+FPGA架構[4,7]。系統硬件模塊示意圖如圖3所示。
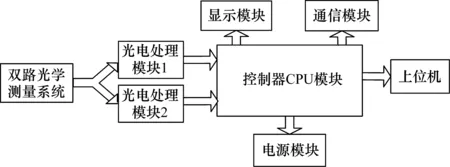
圖3 系統硬件模塊示意圖
2.1 雙路光電信號處理模塊
雙路光電信號處理模塊由電流轉換電路、跟隨濾波電路和二值化電路等組成。由于光電傳感器采集的電流信號非常弱,因此必須對電信號進行放大,并轉換成電壓信號。由于LF353的低成本、高速率,因此本文采用LF353運算放大器。除此以外,通過對電壓信號跟隨濾波可以進一步減少噪聲,提高了信噪比和抗干擾能力[4]。濾波后通過LM393比較器進行二值化比較處理,將模擬信號轉換為數字信號,處理后的信號低電平嵌位到0 V,高電平嵌位到3.3 V,FPGA處理器對電平信號進行運算處理,其模塊電路原理圖如圖4所示。

圖4 雙路光電信號處理電路
2.2 主控制器模塊
主控制器模塊電路采用ARM+FPGA的核心架構,FPAG負責采集待測工件形成的低電平脈沖時間,并將其發送到ARM處理器中,通過ARM進一步完成數據運行,最后將數據通過Modbus協議發送至上位機實時顯示[4,8]。本文采用的ARM芯片為STM32,它具有性能高、功耗小等特性,與FPGA通過SPI高速通信,兩者結合后大大增強了數據采集及運算能力[4],遠遠超過了單個處理器的處理速度。這種方法特別適用于生產過程中動態線材的尺寸監測。
2.3 電源模塊
由于系統電路處理模塊眾多,且各模塊的電源要求不同,因此需要單獨設計電源模塊。其中控制器ARM和FPGA需要3.3 V電壓,激光發射器電源為5 V,光電傳感器電源為-12 V,而電機需要電壓進行調速,因此采用3.3 V可調電壓[4]。LF353放大器需要雙電源供電,正電壓采用輸入供電電源,負電壓由L5973D芯片轉換后的-12 V。其中發射管電源采用SPX117將系統輸入電源轉化為5 V,其他電源都通過L5973D芯片轉換成電路所需電源。電源模塊電路圖如圖5所示。
2.4 通信顯示模塊
系統采用Modbus通信協議,通過串口將工件尺寸發送到上位機,上位機對數據進行實時顯示。除此之外,本機還具有數據校正功能,通過設置的校正系數得出精確穩定的數值,且電機的轉速和各個鏡面的掃描數據也可以通過上位機讀取[4]。圖6為通信模塊電路圖,由RS232器件及其外部電路組成,它具有兩路通信接口:TX1和RX1與上位機通信,TX2和RX2與外部設備通信。

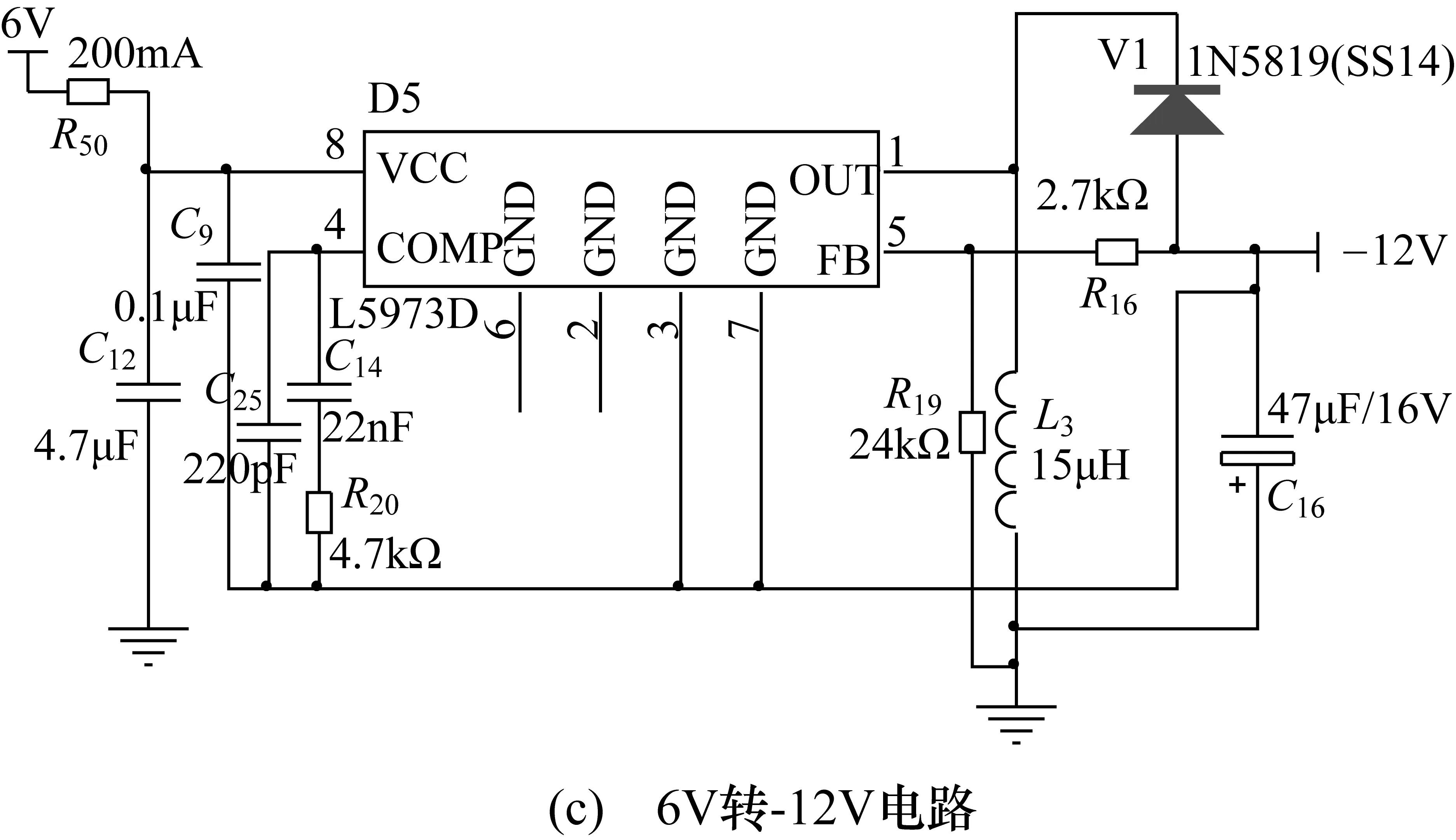
圖5 電源管理模塊電路
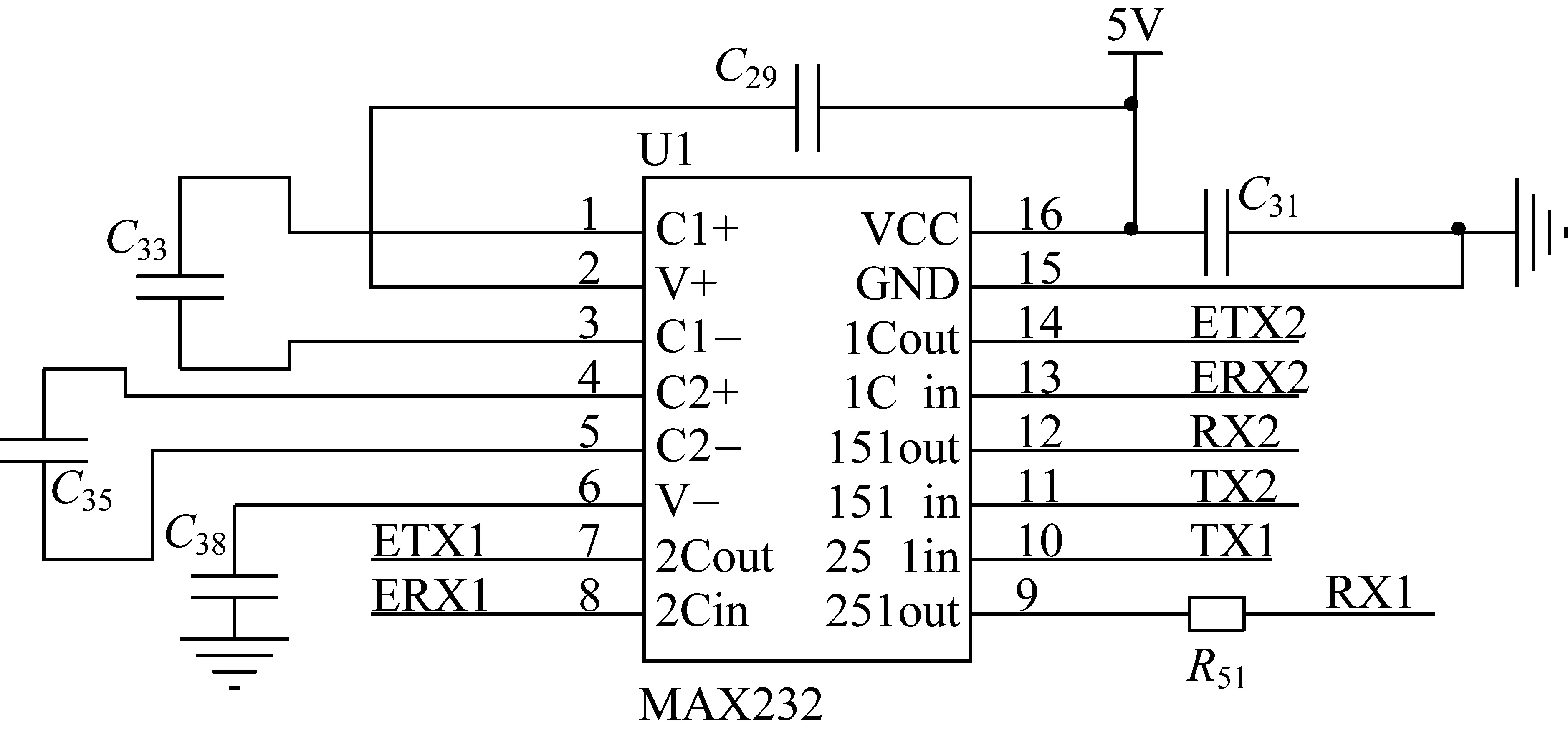
圖6 RS232通信模塊電路圖
3 系統軟件設計
系統軟件設計主要由FPGA數據采集,STM32數據處理和數據傳輸組成。FPGA晶振頻率為50 MHz,它能高速采集兩路光電信號的低電平脈沖時間,通過SPI協議將數據傳輸給STM32處理,STM32既要完成數據處理,還要將數據發送至上位機顯示[4]。上位機接受控制板的尺寸數據后實時顯示,若總體數據偏差太大,則通過調整校正系數對結果進行修正,保證數據的精度和穩定性[4]。流程圖如圖7所示。
其中,數據處理作為主程序中最重要的部分,它直接關系到測量尺寸的精確度和穩定性。本文運用累加求和取平均值的平滑濾波處理算法,連續采集10組工件數據后刪除其中最大值和最小值,累加100組數據后對所有數據求和取平均值[4]。通過這種算法可以減少隨機誤差,確保數據穩定。此外,根據生產現場動態監測扁平線纜的要求,測試軟件增加了對連續出料的扁平線測試位置偏斜的警示。其原理為:一般扁平線在生產過程中,通過擠壓拉伸變成所需的長、寬尺寸,
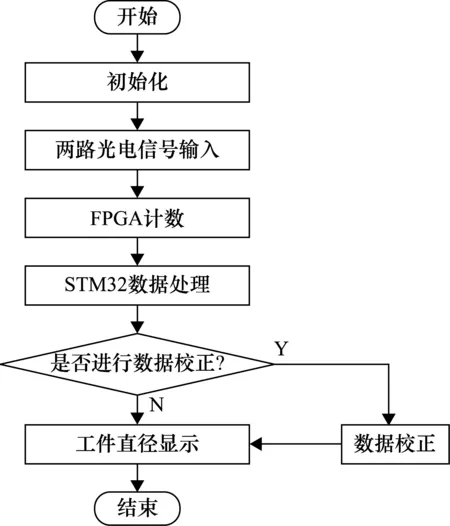
圖7 主程序流程圖
而在擠壓過程中,多數情況下長、寬尺寸的變化是無關聯的;但如果某個時候,測試儀監測到的長寬變化完全按比例增減,則可以判定為漆包線測試的投影有偏斜,從而觸發報警,交由人工來處理。
4 實驗結果與分析
實驗中利用雙路掃描式激光測徑系統,對標準方形樣棒進行雙向檢測,以檢測數據穩定性和重復性。光路系統平臺和電路控制板分別如圖8和圖9所示。

圖8 光路系統平臺

圖9 電路控制板實物圖
通過Modbus協議將工件尺寸發送到上位機,上位機實時顯示數據,并進行修正。圖10為Modbus的顯示界面。
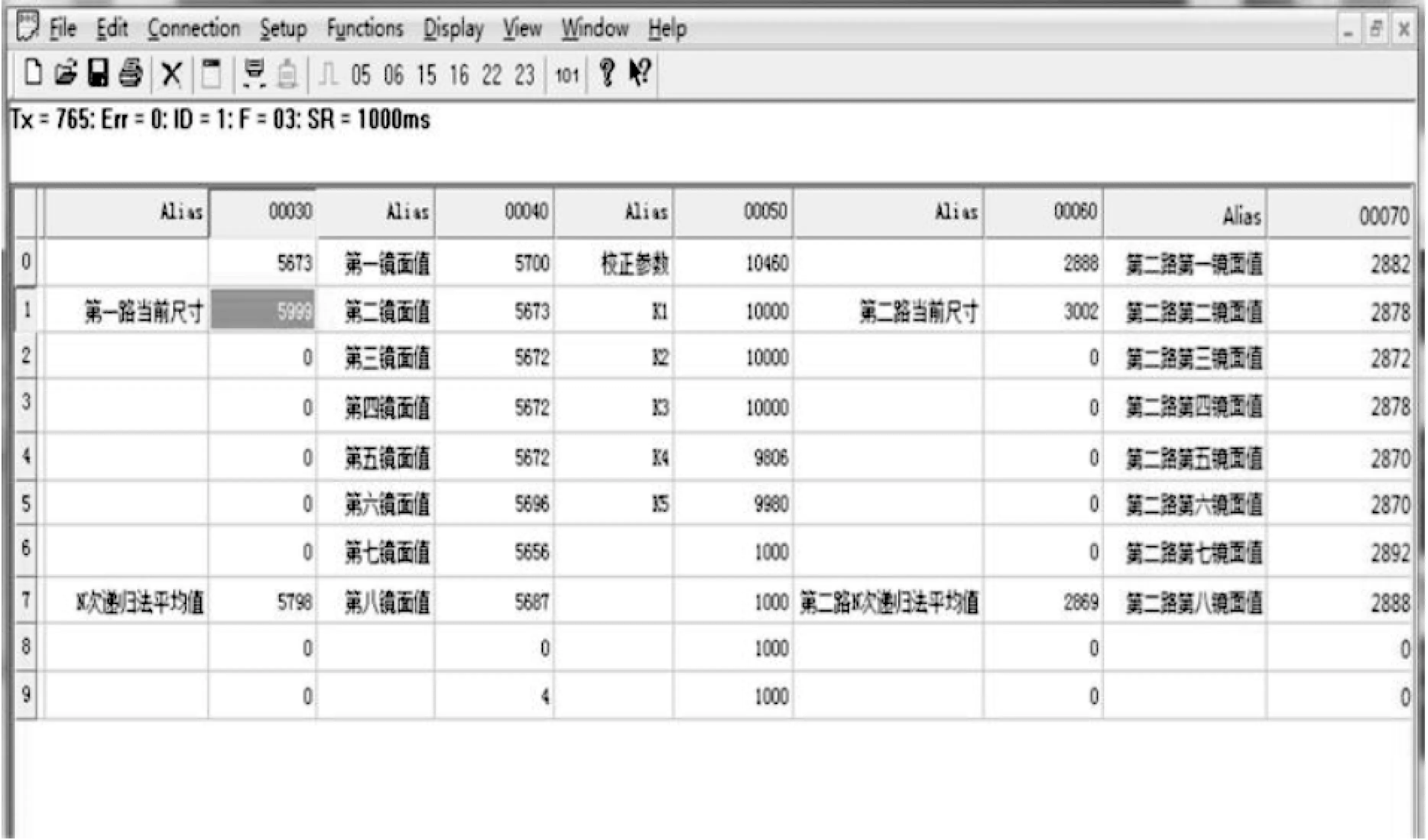
圖10 Modbus的數據顯示
本文采用尺寸為3 mm×6 mm、2 mm×7 mm和2 mm×9 mm的方形樣棒進行試驗,通過對樣棒在同一位置放置8次的方法觀察數據的微弱變化來驗證測徑系統的重復性,測量數據如表1所示,Dx為水平方向測量的數據,Dy為垂直方向測量的數據。通過試驗數據得出重復性最大誤差為5 μm,最大相對誤差為0.5%,滿足設計要求。

表1 方形棒重復性試驗
針對穩定性試驗,按照JJF1250-2010《激光測徑儀校準規范》標準規定,3 min觀測一次樣棒數據,連續測量2 h[4]。由于數據龐大,因此采用2 mm×8 mm方形標準棒進行測試。結果如圖11所示。
通過重復性和穩定性實驗數據得出,雙路測徑系統整體性能良好,數據誤差小,系統重復性和穩定性能夠滿足應用要求。
5 結束語
本文針對扁平形漆包線的生產檢測需求,研制了一款基于ARM+FPGA的雙路掃描式激光測徑系統,實現了工件線徑的寬度和厚度的雙向檢測,測量精度高、穩定性好。實驗結果表明,該雙路激光測徑系統測量范圍為1~15 mm,精度為0.001 mm,示值誤差最大不超過±0.005 mm,具有上位機顯示和校正功能,對工件線徑檢測有廣泛應用前景。

圖11 2 mm×8 mm方形樣棒測試
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
