基于自適應(yīng)容積卡爾曼濾波的交互多模型算法
2019-09-24 01:08:46杜云張靜怡
科技創(chuàng)新與應(yīng)用 2019年25期
杜云 張靜怡

摘? 要:ADS-B航跡處理主要包括航跡數(shù)據(jù)濾波和濾波后數(shù)據(jù)可靠性的判斷。飛機(jī)飛行運(yùn)動(dòng)復(fù)雜,而報(bào)文需要在飛行過(guò)程中向外界發(fā)送,此時(shí)報(bào)文會(huì)受到來(lái)自外界的影響和干擾,從而使航跡信息出現(xiàn)誤差或丟失。為提高ADS-B航跡報(bào)文的準(zhǔn)確性,文章采用了交互多模型濾波算法,將自適應(yīng)容積卡爾曼濾波器作為交互多模型濾波算法的濾波器,并將當(dāng)前統(tǒng)計(jì)模型作為交互多模型的子模型。仿真結(jié)果表明,論文改進(jìn)的算法提高了濾波算法的濾波性能,相較于傳統(tǒng)的交互多模型濾波算法具有更高的濾波精度。
關(guān)鍵詞:航跡濾波;當(dāng)前統(tǒng)計(jì)模型;交互多模型;自適應(yīng)容積卡爾曼濾波算法
中圖分類(lèi)號(hào):O159? ? ? ? ?文獻(xiàn)標(biāo)志碼:A? ? ? ? ?文章編號(hào):2095-2945(2019)25-0022-04
Abstract: ADS-B track processing mainly includes track data filtering and judgment of data reliability after filtering. The flight motion of the aircraft is complex, and the message needs to be sent to the outside world during the flight. At this time, the message will be affected and disturbed by the outside world, resulting in the error or loss of track information. In order to improve the accuracy of ADS-B track message, the interactive multi-model filtering algorithm is adopted, and the adaptive volume Kalman filter is used as the filter of interactive multi-model filtering algorithm. The current statistical model is regarded as a submodel of the interactive multi-model. The simulation results show that the improved algorithm improves the filtering performance of the filtering algorithm, and has higher filtering accuracy than the traditional interactive multi-model filtering algorithm.
Keywords: track filtering; current statistical model; interactive multiple model; adaptive volume Kalman filtering algorithm
廣播式自動(dòng)相關(guān)監(jiān)視(Automatic Dependent Surveillance-Broadcast),簡(jiǎn)稱(chēng)ADS-B[1]是一種協(xié)同監(jiān)視技術(shù)。ADS-B報(bào)文產(chǎn)生的精準(zhǔn)航跡信息是航空管制的數(shù)據(jù)依據(jù),報(bào)文的丟失或錯(cuò)誤,目標(biāo)運(yùn)動(dòng)狀態(tài)的改變都會(huì)導(dǎo)致目標(biāo)跟蹤算法精度降低或發(fā)散;環(huán)境的變化引起過(guò)程噪聲和觀(guān)測(cè)噪聲統(tǒng)計(jì)性能變化;目標(biāo)運(yùn)動(dòng)模型的非線(xiàn)性會(huì)引起模型誤差。這就需要通過(guò)濾波的方法對(duì)數(shù)據(jù)進(jìn)行預(yù)測(cè)和修正,使航跡更加準(zhǔn)確。提高濾波算法的濾波精度、自適應(yīng)能力、與目標(biāo)運(yùn)動(dòng)模型匹配度,能夠減少誤差,獲得更好的性能。文獻(xiàn)[2]采用經(jīng)典的交互多模型算法,濾波器和運(yùn)動(dòng)模型集選取都較為基礎(chǔ),所以濾波精度不理想[2]。文獻(xiàn)[3]采用交互多模型算法,對(duì)直線(xiàn)運(yùn)動(dòng)模型具有很好地濾波精度,對(duì)其他運(yùn)動(dòng)模型效果不佳[3]。文獻(xiàn)[4]將“當(dāng)前”統(tǒng)計(jì)模型和修正轉(zhuǎn)彎模型作為交互多模型算法的模型集,增強(qiáng)了算法的自適應(yīng)能力[4]。本論文將自適應(yīng)容積卡爾曼濾波算法與交互多模型算法相結(jié)合,用自適應(yīng)容積卡爾曼濾波器代替卡爾曼濾波器,進(jìn)一步提高了濾波算法的濾波性能,相較于傳統(tǒng)的IMM濾波算法具有更高的濾波精度。
1 目標(biāo)運(yùn)動(dòng)系統(tǒng)模型
首先建立系統(tǒng)模型來(lái)描述飛機(jī)的運(yùn)動(dòng)狀態(tài),就是把飛機(jī)的運(yùn)動(dòng)狀態(tài)抽象成兩個(gè)數(shù)學(xué)模型:狀態(tài)模型和量測(cè)模型。該方法把某一時(shí)刻系統(tǒng)狀態(tài)描述為前一時(shí)刻的系統(tǒng)狀態(tài)的函數(shù),系統(tǒng)的輸入輸出用狀態(tài)轉(zhuǎn)移模型和輸出量測(cè)模型表示。飛機(jī)離散時(shí)間系統(tǒng)的狀態(tài)方程和量測(cè)方程分別表示為:
其中,W(k)為k時(shí)刻系統(tǒng)的過(guò)程噪聲,X(k)為k時(shí)刻的狀態(tài),F(xiàn)(k)為狀態(tài)轉(zhuǎn)移矩陣,?祝(k)為噪聲轉(zhuǎn)移矩陣,H(k)為觀(guān)測(cè)矩陣,V(k)為觀(guān)測(cè)噪聲。
2 自適應(yīng)容積卡爾曼濾波算法
2.1 容積卡爾曼濾波算法
由Arasaratnam等人提出的容積卡爾曼濾波算法(CKF)是新興的一種非線(xiàn)性濾波算法,其核心是采用三階球面-相徑容積規(guī)則近似非線(xiàn)性函數(shù)傳遞的后驗(yàn)均值和協(xié)方差,有強(qiáng)大的數(shù)學(xué)理論作支撐[5,6]。相較于較為常用的擴(kuò)展卡爾曼濾波算法[7]和無(wú)跡卡爾曼濾波算法[8]其計(jì)算量更小,精度更高。從CKF的實(shí)施流程來(lái)看,其數(shù)學(xué)理論嚴(yán)謹(jǐn),參數(shù)選取方便,收斂效果好,設(shè)計(jì)方法簡(jiǎn)潔,需要調(diào)節(jié)的參數(shù)較少,所以該算法自被提出,就受到了廣泛的關(guān)注。
CKF算法需要計(jì)算容積點(diǎn),而后利用2n個(gè)容積點(diǎn)進(jìn)行加權(quán)求和來(lái)近似高斯積分,對(duì)于解決任意分布函數(shù)利用容積積分準(zhǔn)則求解積分問(wèn)題,可以表示為:
式中,表示正態(tài)分布,其均值為?滋、協(xié)方差為P,?棕i表示容積點(diǎn)的權(quán)值,?孜i表示傳播的容積點(diǎn)集,L表示等權(quán)容積點(diǎn)數(shù)。
CKF算法的實(shí)現(xiàn)步驟為:
時(shí)間更新
已知k-1時(shí)刻的狀態(tài)xk-1誤差協(xié)方差為Pk-1,對(duì)Pk-1做Cholesky分解,
選擇容積點(diǎn)為:
經(jīng)系統(tǒng)傳遞后的容積點(diǎn):
k時(shí)刻的狀態(tài)預(yù)測(cè)值:
k時(shí)刻的誤差協(xié)方差:
量測(cè)更新
對(duì)Pk|k-1做Cholesky分解:
計(jì)算容積點(diǎn):
通過(guò)測(cè)量方程傳遞容積點(diǎn):
估計(jì)k時(shí)刻的觀(guān)測(cè)預(yù)測(cè)值:
估計(jì)k時(shí)刻量測(cè)誤差協(xié)方差:
估計(jì)k時(shí)刻一步預(yù)測(cè)相關(guān)協(xié)方差:
估計(jì)k時(shí)刻濾波增益:
求取k時(shí)刻狀態(tài)估計(jì)更新值:
求取k時(shí)刻狀態(tài)誤差協(xié)方差估計(jì)值:
2.2 自適應(yīng)卡爾曼濾波算法
在實(shí)際情況中,由于外界環(huán)境的復(fù)雜性,量測(cè)誤差就會(huì)改變,但是當(dāng)量測(cè)誤差協(xié)方差矩陣Rk一直用固定的初始值,容積卡爾曼算法就不能根據(jù)環(huán)境的變化進(jìn)行自我調(diào)整。因此,對(duì)容積卡爾曼算法進(jìn)行自適應(yīng)改進(jìn)。
新息序列為:
新息協(xié)方差矩陣為:
用新息樣本數(shù)據(jù)對(duì)新息協(xié)方差矩陣進(jìn)行近似估計(jì)
其中,L表示樣本數(shù)據(jù)個(gè)數(shù)。結(jié)合卡爾曼濾波算法中量測(cè)誤差協(xié)方差,Rk可以表示為:
(21)
3 基于自適應(yīng)容積卡爾曼濾波的交互多模型算法
交互多模型濾波(IMM)算法是一種軟切換算法,目前在機(jī)動(dòng)目標(biāo)跟蹤領(lǐng)域得到了廣泛的應(yīng)用[9,10]。IMM算法使用兩個(gè)或更多的模型來(lái)描述工作過(guò)程中可能的狀態(tài),最后通過(guò)有效的加權(quán)融合進(jìn)行系統(tǒng)狀態(tài)估計(jì),很好地克服了單模型估計(jì)誤差較大的問(wèn)題。IMM算法采用的是多個(gè)卡爾曼濾波器進(jìn)行并行處理。但處理后的精度效果不理想,所以論文用自適應(yīng)容積卡爾曼濾波器代替卡爾曼濾波器。基于自適應(yīng)容積卡爾曼濾波的交互多模型算法的步驟如下:
步驟1.輸入交互
由目標(biāo)的狀態(tài)估計(jì) 與每個(gè)濾波器的模型概率?滋j(k-1)得到混合估計(jì) 和協(xié)方差 ,將混合估計(jì)作為當(dāng)前循環(huán)的初始狀態(tài)。具體參數(shù)計(jì)算如式(26)
預(yù)測(cè)概率(歸一化常數(shù))為:
混合概率為
混合狀態(tài)估計(jì)為:
混合協(xié)方差估計(jì)為:
式中,Pij模型i到模型j的轉(zhuǎn)移概率;?滋j(k-1)為模型j在k-1時(shí)刻的概率。
步驟2:自適應(yīng)容積卡爾曼濾波
使用混合估計(jì)作為單個(gè)濾波器的輸入用自適應(yīng)容積卡爾曼濾波進(jìn)行預(yù)測(cè)和更新步驟,按照式(3)~(21),得到殘差,殘差協(xié)方差和協(xié)方差。
步驟3:模型概率更新
第j個(gè)模型的似然函數(shù)為:
模型j的概率為:
其中,c為歸一化常數(shù),
步驟4:輸出交互
IMM估計(jì)量的總體估計(jì)量以單個(gè)濾波器估計(jì)量的加權(quán)和計(jì)算,即
4 仿真結(jié)果及分析
選擇勻速運(yùn)動(dòng)模型、勻加速運(yùn)動(dòng)模型及“當(dāng)前”統(tǒng)計(jì)模型作為算法的模型集。k時(shí)刻目標(biāo)狀態(tài)向量為Xk=[x ■ ■ y ■ ■]T,分別為x和y方向的位置、速度和加速度。假設(shè)目標(biāo)初始條件為X0=[10000 0 0 2000 -15 0]。目標(biāo)在400s~600s向x軸慢轉(zhuǎn)彎,x方向和y方向的加速度為0.08m/s,轉(zhuǎn)彎結(jié)束后加速度降成零,從610s開(kāi)始做快轉(zhuǎn)彎運(yùn)動(dòng),加速度為0.3m/s2。控制模型轉(zhuǎn)換的馬爾科夫鏈的轉(zhuǎn)移概率矩陣為
設(shè)定各模型在此時(shí)刻的概率分別為?滋=[0.4 0.3 0.3],采樣周期T=2s,量測(cè)噪聲是均值為0、標(biāo)準(zhǔn)偏差為100m的高斯序列。
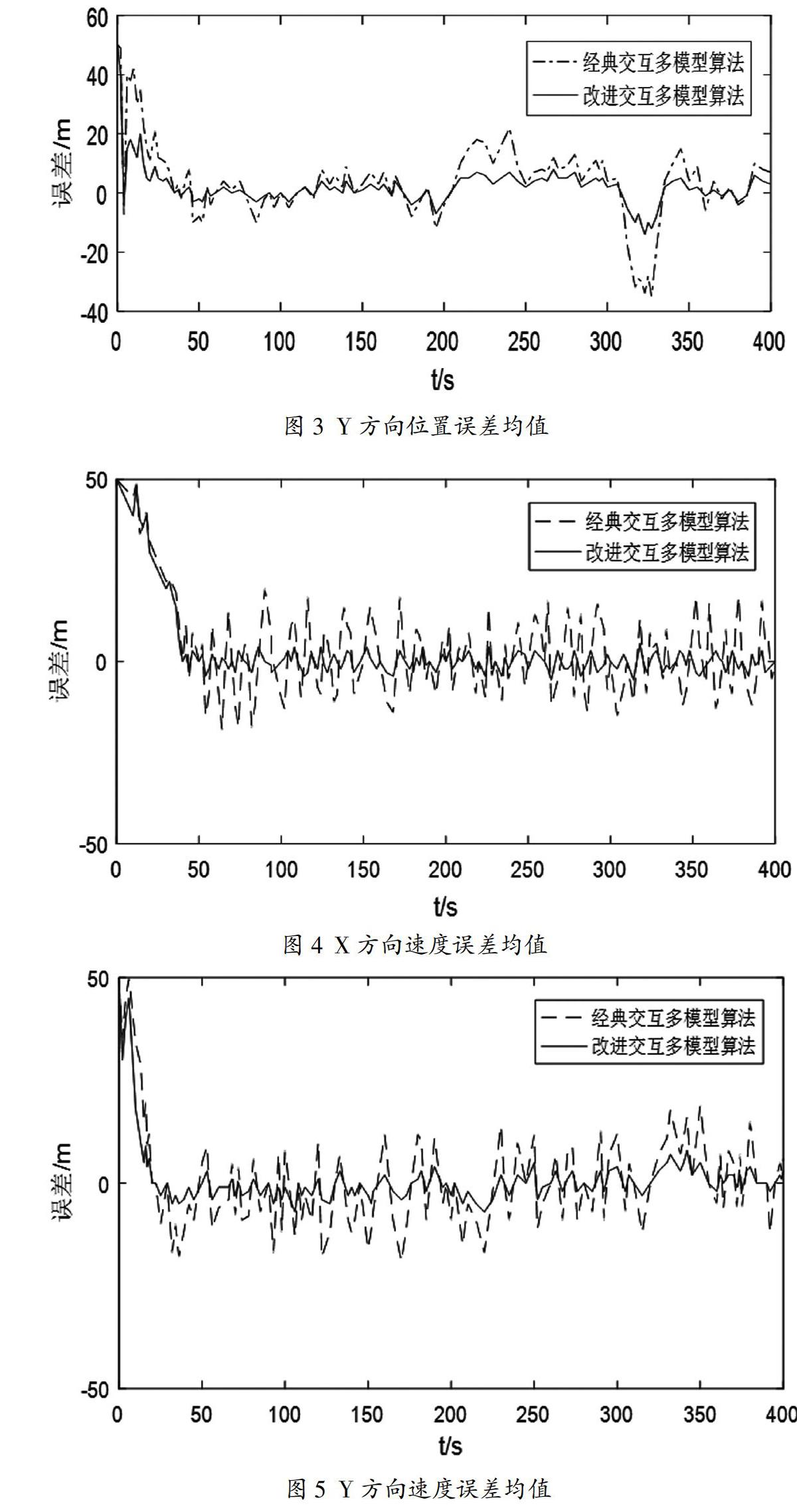
圖2和圖3表示的是經(jīng)典交互多模型算法和基于自適應(yīng)容積卡爾曼濾波的交互多模型算法在X方向和Y方向上的位置誤差均值,從圖中可以看出基于自適應(yīng)容積卡爾曼濾波的交互多模型算法的誤差均值整體要小于經(jīng)典交互多模型算法。
圖4和圖5表示的是經(jīng)典交互多模型算法和基于自適應(yīng)容積卡爾曼濾波的交互多模型算法在X方向和Y方向上的速度誤差均值,從圖中可以看出基于自適應(yīng)容積卡爾曼濾波的交互多模型算法的速度誤差均值整體要小于經(jīng)典交互多模型算法。
5 結(jié)束語(yǔ)
本文研究的算法將自適應(yīng)容積卡爾曼濾波算法作為交互多模型濾波算法的濾波器,自適應(yīng)能力減少了誤差,獲得了更好的性能,并將“當(dāng)前”統(tǒng)計(jì)模型作為交互多模型算法的模型集,提高了濾波算法的濾波精度。仿真結(jié)果表明,基于自適應(yīng)容積卡爾曼濾波的交互多模型算法要優(yōu)于經(jīng)典交互多模型算法。
參考文獻(xiàn):
[1]陳蕾,吳仁彪,盧丹.利用多普勒效應(yīng)的ADS-B欺騙式干擾檢測(cè)方法[J].信號(hào)處理,2018,6(11):722-728.
[2]張朝柱,杜瑞敏.IMM算法的高機(jī)動(dòng)目標(biāo)航跡濾波在A(yíng)DS-B中的應(yīng)用[J].應(yīng)用科技,2016,43(5):24-29.
[3]翟海濤.基于IMM模型的目標(biāo)跟蹤算法[J].中國(guó)制造業(yè)信息化,2010,39(13):61-63.
[4]王爾申,翟秋剛,徐嵩,等.基于改進(jìn)交互式多模型算法的ADS-B航跡濾波方法研究[J].電光與控制,2018(07).
[5]Arasaratnam I, Haykin S.A numerical-integration perspective on Gaussian filters[J]. IEEE Transactions on Automatic Control, 2009,54(8):1254-1269.
[6]Nielsen R O. Accuracy of angle estimation with monopulse processing using two beams [J]. Aerospace & Electronic Systems IEEE Transactions on,2001,37(4):1419-1423.
[7]Einicke G A,White L B. Robust extended Kalman filtering[J].Signal Processing IEEE Transactions on,1999,47(9):2596-2599.
[8]Julier S J,Uhlmann J K. Unscented filtering and nonlinear estimation [J]. Proceedings of the IEEE,2004,92(3):401-422.
[9]GAO L, XING J P, MA Z, et al. Improved IMM algorithm for nonlinear maneuvering target tracking [J]. Procedia Engineering, 2012(29):4117-4123.
[10]YUAN G,ZHU W, WANG W, et al. Maneuvering target tracking algorithm based on interacting multiple models[J].Mathematical Problems in Enginerring,2015,2015(5):1-7.
猜你喜歡
童話(huà)王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
測(cè)控技術(shù)(2018年12期)2018-11-25 09:37:34
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
電源技術(shù)(2016年9期)2016-02-27 09:05:39
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
電源技術(shù)(2015年1期)2015-08-22 11:16:28
電測(cè)與儀表(2015年24期)2015-04-09 12:04:36