基于車流量檢測的智能交通控制系統設計與仿真
2019-09-24 01:08:46呂曉穎
科技創新與應用 2019年25期
呂曉穎
摘? 要:文章論述了基于STC89C52單片機采用智能交通控制,系統采用STC89C52單片機和74HC245以及外圍的按鍵、紅外接近傳感器、數碼管等元器件構成,本系統可以根據不同路口車流量大小的變化,來改變各路口紅綠燈的時間,用智能的方式,來達到控制交通的目的。設計通過兩位一體共陰極數碼管顯示,并能通過按鍵對定時進行設置。本系統實用性強、操作簡單、拓展功能強。
關鍵詞:智能交通控制;紅外接近傳感器;車流量
中圖分類號:U495? ? ? ? ?文獻標志碼:A? ? ? ? ?文章編號:2095-2945(2019)25-0042-02
Abstract: This paper discusses the intelligent traffic control based on STC89C52 single chip microcomputer. The system is composed of STC89C52 single chip microcomputer and 74HC245, as well as peripheral key, infrared proximity sensor, digital tube and other components. The system can be based on the change of traffic flow at different intersections. To change the time of traffic lights at each intersection, with an intelligent way to achieve the purpose of traffic control. The design is displayed by two-in-one common cathode digital tube, and the timing can be set by keystrokes. The system has the advantages of strong practicability, simple operation and strong expansion function.
Keywords: intelligent traffic control; infrared proximity sensor; traffic flow
近年來,隨著城市的發展,現代交通燈使用的是定時分配控制方式,存在很多缺點。為了解決上述問題,本文設計了一種根據檢測到的車流量大小來智能控制的交通燈系統。
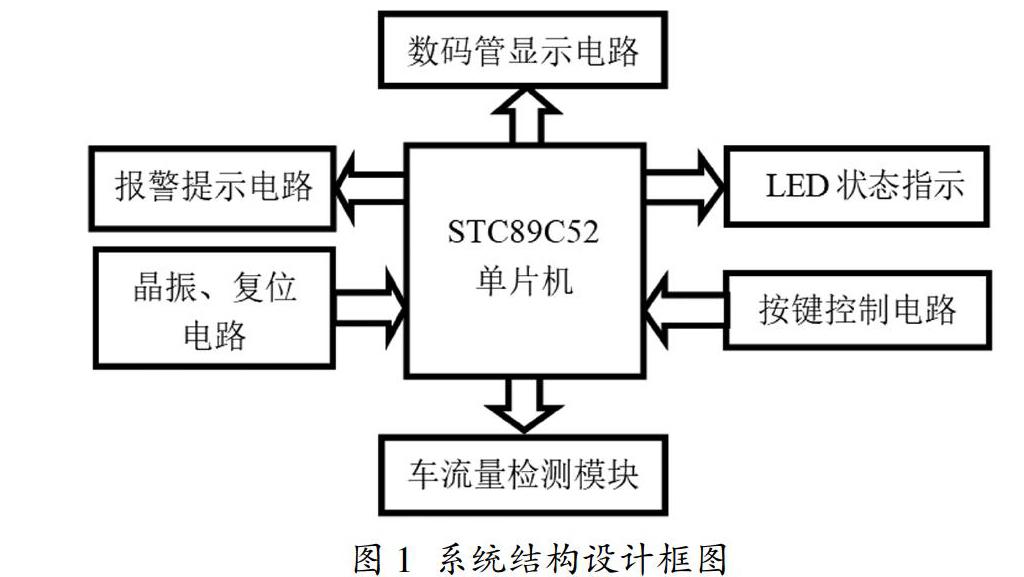
1 智能交通控制系統硬件結構框圖
本文所設計的基于車流量檢測的智能交通控制系統主要由五部分構成:主控模塊、車流量檢測模塊、按鍵設置電路、數碼管顯示電路、報警電路。系統結構框圖如圖1。
2 智能交通控制系統硬件設計
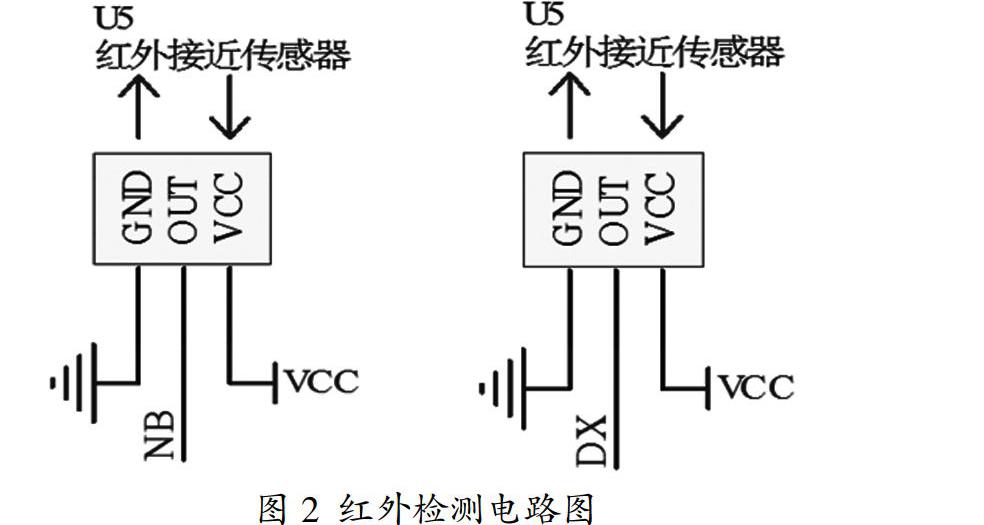
2.1 車流量檢測模塊設計
本設計中紅外接近傳感器有三個引腳,一個接地GND,一個接電源VCC,還有一個就是數據輸出引腳OUT,OUT與單片機P3.6(WR)相連接,即引腳16,功能為:P3.6把信號寫入外部數據存儲器,另一傳感器中的OUT與單片機P3.5(T1)相連接,即引腳15。即數據輸出就是當前面感應到了有障礙物,就會輸出一個低電平,沒有障礙物時就會輸出一個高電平給單片機的I/O口,然后程序上經過檢測I/O口是高電平還是低電平,來判斷是否有車輛經過。
2.2 主控制模塊電路設計
主控模塊采用STC89C52單片機作為MCU,主要由電源電路、晶振電路以及復位電路組成,晶振電路中的晶振頻率為12MHz。
2.3 信號顯示驅動電路
74HC245芯片中輸入端如果輸入高電平,輸出端就是高電平,輸入端如果輸入低電平,輸出端就是低電平。74HC245主要是驅動作用,比如引腳3輸入一個高電平,引腳17也會輸出一個高電平,如果引腳3輸入一個低電平,引腳17也會輸出低電平,其他引腳一一對應,為什么要接一個驅動電路,因為單片機的驅動電流可能就10幾毫安,根本無法驅動小燈或者數碼管的亮度,所以增加了一個驅動芯片,電流就可以達到20幾毫安或者幾十毫安。
2.4 按鍵輸入電路
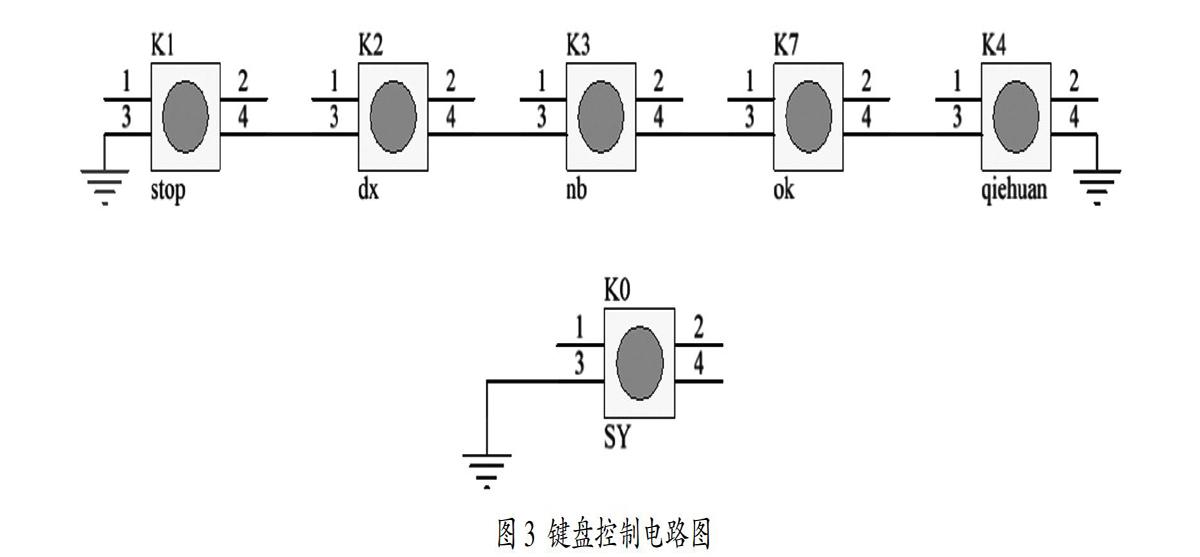
如圖3所示。按鍵K0、K1、K2、K3、K4、K7中,引腳1和引腳2互相導通,引腳3和引腳4互相相通,只要接引腳1和引腳3或引腳1和引腳4或引腳2和引腳3或引腳2和引腳4,電路應用中最好的區別方法是接按鍵的斜對角。
K0為夜間模式,當按下K0鍵時,夜間模式啟動,四個方向的紅綠燈都變成黃燈,為閃爍狀態。所以車輛應減速,注意觀察路口情況,隨時做好制動準備,緩慢通過。
K1為緊急模式,當按下K1鍵時,緊急模式啟動,四個方向的紅綠燈都變成紅色,且為常亮狀態,所有車輛應緊急制動,讓救護車、消防車、警車等特種車輛優先通行,當特種車輛通過后,緊急模式取消,恢復為緊急模式前的狀態,所有車輛正常行駛。
K2為東西通行,當按下K2鍵時,東西方向的紅綠燈都變成綠色,且為常亮狀態,東西方向車輛應快速通過,可根據車流量的大小來啟用此模式,靈活性比較強,能緩解交通擁擠,減少道路交通的壓力。
K3為南北通行,當按下K3鍵時,南北方向的紅綠燈都變成綠色,且為常亮狀態,南北方向車輛應快速通過,可根據車流量的大小來啟用此模式,靈活性比較強,能緩解交通擁擠,減少道路交通的壓力。
K4為查看按鍵,當按一下K4鍵時,可以觀察當前的通行時間,再按一下時,為查看紅外傳感器檢測的狀態,顯示綠燈的兩個方向,讓紅外傳感器檢測到障礙物,可以觀察到數碼管上具體的數字,顯示紅燈的兩個方向,讓紅外傳感器檢測到障礙物時,系統不能加減,數碼管上數字不變為0,系統檢測到車輛闖紅燈,系統會發出警報,蜂鳴器發出刺耳的聲響。
K7為確認鍵,當按下K7鍵時,具有計時作用,系統開始倒計時,根據之前檢測到的車流量大小來改變交通燈的時間來控制交通燈。
2.5 報警提示電路
報警提示電路中,含有三極管、蜂鳴器和限流電阻三個部分。
三極管為開關,因為電平非常的低,導致三極管飽和,產生導通性,蜂鳴器會發出刺耳的聲響;而其中非常高的電平,又會導致三極管閉合,蜂鳴器無反應,不再發出刺耳的聲響。
三極管中發射極與電源相連,基極與電阻R5一端相連,集電極與蜂鳴器一端相連。電阻R5為2.2KΩ,電阻R5的另一端與單片機的P3.0(RXD)相連,起到串行通信輸入的作用。蜂鳴器LS一端接地,另一端與三極管的集電極相連。
3 Proteus 8.6仿真結果
利用Proteus 8.6軟件,對本文設計的智能交通控制系統進行了仿真測試,經測試,運行結果穩定,能夠實現車流量大時,通行方向上的綠色交通燈倒計時時間自動增加10秒。
4 結束語
本文設計的基于車流量的智能交通控制系統,與以往交通燈控制系統不同之處在于,可根據檢測車流量的大小智能的調整車輛通行的時間。經實物測試,系統運行穩定,準確率高,具有一定的商業應用價值。
參考文獻:
[1]武玉升.基于單片機的智能交通燈控制系統仿真設計[J].電子世界,2018:118-119+122.
[2]郭玉秀.基于單片機的十字路口交通燈的設計及仿真[J].現代制造技術與裝備,2018:66-68.
[3]胡瑞楠.基于51單片機的智能交通燈系統設計[J].通訊世界,2018:252-253.
[4]秦風元.基于51單片機的交通燈設計[J].時代農機,2017:126-127.