一種基于斜率檢測算法的馬赫-曾德爾調制器偏壓控制研究
2019-09-27 08:57:40周其超陶存炳
雷達與對抗 2019年3期
關鍵詞:信號
周其超,陶存炳,黃 偉
(中國船舶重工集團公司第七二三研究所, 江蘇 揚州 225101)
0 引 言
電光調制器是光控相控陣系統中的一個重要組成模塊,將射頻信號經過調制器加載到光信號上進行傳輸和信號處理。實際應用中,電光調制器多采用鈮酸鋰材料的馬赫-曾德爾調制器。但是,由于外界環境溫度變化或者高頻連續信號的影響,馬赫-曾德爾調制器的工作點會發生漂移,從而影響到調制器的調制精度,也會影響到整個光控相控陣系統的工作穩定[1-5]。因此,本文研究了馬赫-曾德爾調制器的偏壓控制技術,分析了基于傳輸曲線斜率檢測算法的馬赫-曾德爾調制器工作點偏壓控制原理,并且進行了馬赫-曾德爾調制器工作點偏壓控制系統的硬件和軟件設計。通過實驗驗證,表明該偏壓控制系統能夠對馬赫-曾德爾調制器的工作點進行有效的偏壓控制。
1 基于斜率檢測算法的馬赫-曾德爾調制器工作點偏壓控制原理
在理想條件下,馬赫-曾德爾調制器的傳輸特性曲線公式可表示為
(1)
式中,Pout為馬赫-曾德爾調制器輸出的光功率;Pin為馬赫-曾德爾調制器輸入光功率;Vπ為調制器的半波電壓;V為偏置電壓,即外界偏壓控制系統對調制器所加載的偏置電壓。圖1為馬赫-曾德爾調制器輸出光功率與所加載的偏置電壓的響應曲線。
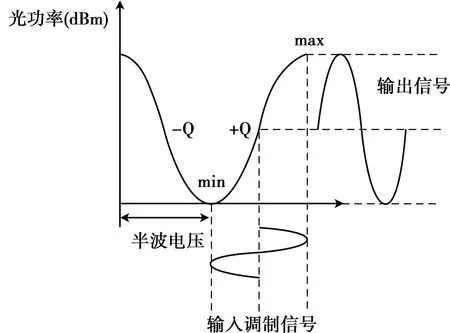
圖1 馬赫-曾德爾調制器相應曲線
從圖1所知,馬赫-曾德爾調制器的輸出光功率隨著偏置電壓的不同而改變。調制器根據調制方式的不同可以加載在不同的工作點。由圖可知,馬赫-曾德爾調制器工作點設置為-Q和+Q點時其輸出信號沒有失真。本文以-Q點作為工作點。
為了使調制器不受到溫度等環境因素的影響而始終工作在-Q點,本文采用通過檢測馬赫-曾德爾調制器傳輸特性曲線的斜率的變化來判斷此時調制器工作點的位置,利用偏壓控制系統調節調制器的偏置電壓,最終將工作點移到-Q點。具體做法如下:
(1) 向馬赫-曾德爾調制器的偏置電壓加載端加載一個微弱的擾動信號(幅值大約為調制信號的1%,且為低頻信號),擾動信號經過調制器后對其進行放大和濾波;
(2) 將經過放大和濾波后的信號與原始的擾動信號進行相乘和積分處理,得到一個與馬赫-曾德爾調制器傳輸特性曲線斜率呈線性關系的誤差信號;
(3) 通過檢測誤差信號的大小,判斷此時工作點有無漂移以及漂移的方向,最后通過調節偏壓將工作點移至-Q點。
上述利用擾動信號實現對調制器的偏壓控制原理如下:
設擾動信號為
VRAO=Asinωt
(2)
擾動信號經過調制器后的輸出信號為
(3)
將此信號與擾動信號進行相乘和積分得到一個直流誤差信號為W,即
(4)
當τ?2π/ω時,濾除直流分量,對公式(4)展開計算得到
(5)

從馬赫-曾德爾調制器的傳輸特性曲線來看,對公式(1)求導,從而得到斜率K為
(6)
對比公式(5)與公式(6),誤差信號W與調制器傳輸曲線的斜率呈線性關系。從圖1可知,當馬赫-曾德爾調制器工作在-Q時,其斜率為最小值,故直流誤差信號W也為最小值;當調制器傳輸曲線發生漂移時,可以通過鎖定直流誤差信號W的最小值從而設置新的偏置電壓,最終實現對馬赫-曾德爾調制器有效偏壓控制。
2 系統設計
2.1 硬件設計
偏壓控制系統主要包括PIN光電檢測及其放大模塊、低通濾波模塊、相位補償模塊、乘法器模塊、微處理器模塊、信號產生模塊、積分模塊和加法器模塊等。具體框圖如圖2所示。
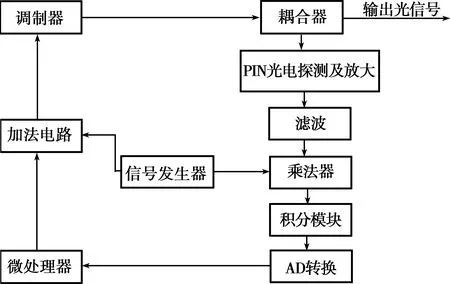
圖2 偏壓控制系統框圖
通過馬赫-曾德爾調制器輸出的光信號經過耦合器分出5%,通過PIN光電二極管及其放大電路將微弱的光信號轉換成電信號并進行放大。經過放大后的電信號通過低通濾波和相位補償模塊濾除掉被調制的信號及噪聲。在乘法器模塊中,該信號與信號發生器產生的擾動信號相乘,并將相乘的結果發送至積分模塊。完成積分后得到一個誤差信號,經過AD轉換成數字信號后發送至微處理器模塊。微處理器模塊通過該誤差信號去判斷此時調制器是否工作在-Q點,并設置調節偏置電壓。將調節后的偏置電壓與擾動信號通過在加法器模塊一同加載在調制器的偏壓輸入端,從而完成一個閉環的反饋偏壓控制。
PIN光電二極管采用北京世維通科技公司的PDS473-a光電二極管。該光電二極管具有高靈敏度、低暗電流等特點,利用TI公司的OPA657運算放大器搭建反向放大電路,從而獲得較大的電壓信號。
為了濾除被調制信號通過調制器產生的光調制信號和噪聲信號,偏壓控制系統采用無限增益多路反饋型濾波電路進行濾波。考慮偏壓控制系統尺寸的問題,根據減少器件簡化電路的原則,偏壓控制系統采用二級無限增益反饋型濾波電路,濾波的帶寬為2~4 kHz。濾波電路如圖3所示。
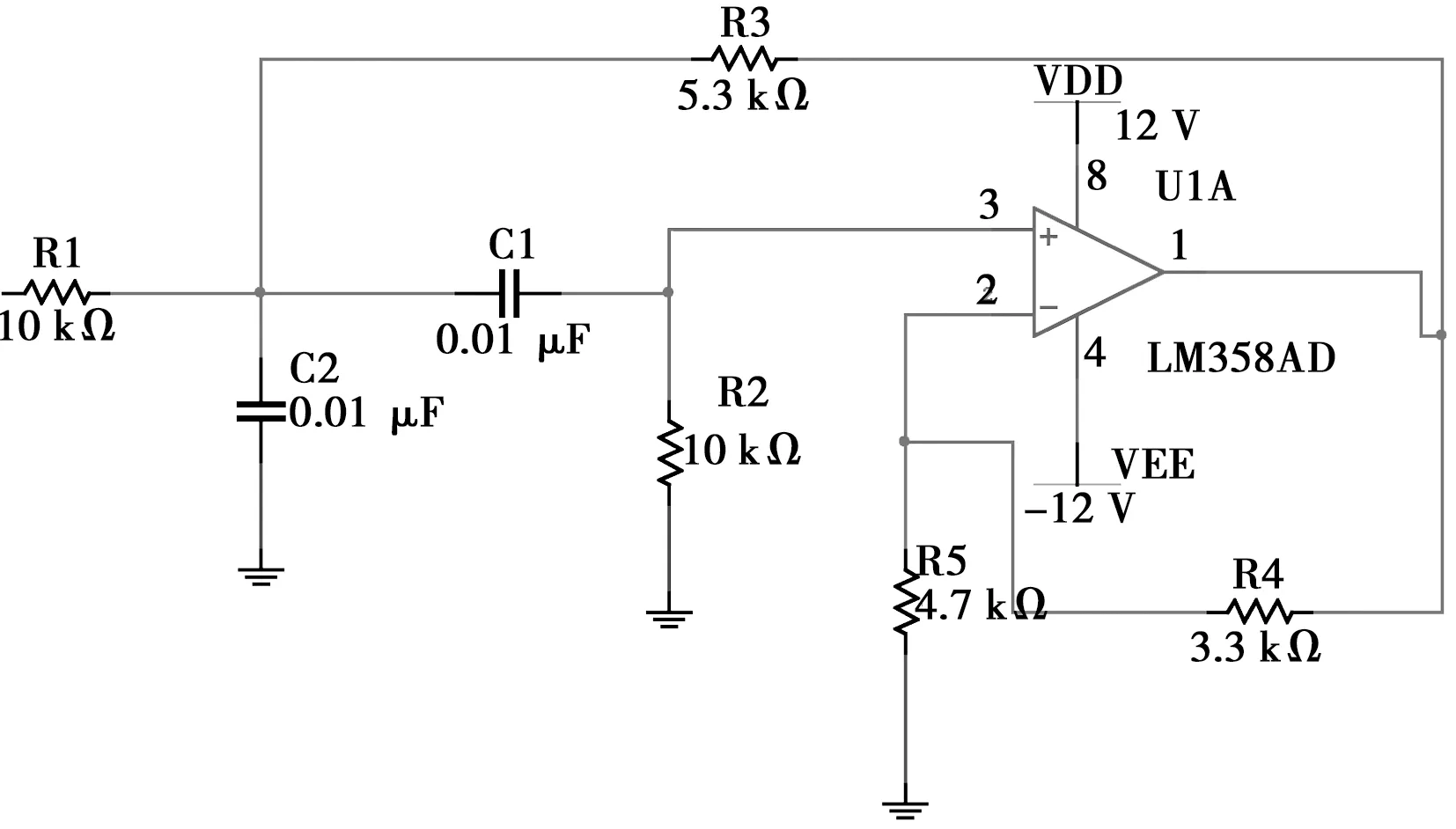
圖3 低通濾波電路
乘法器模塊的主要功能是實現擾動信號與擾動信號經過調制器輸出的光信號進行相乘。由于擾動信號和擾動信號調制后的光信號的幅度都有正負值,所以偏壓控制系統采用ADI公司的AD633四象限乘法器芯片。
偏壓控制系統采用STM32F103RCT6芯片作為微處理器模塊,其接收AD輸出的數字信號,判斷此時調制器的工作點是否發生漂移,通過相關的步進算法調節偏壓輸出,使得調制器輸出的信號沒有失真。
偏壓控制系統采用ADI公司的AD9837芯片作為信號發生器。它的輸出頻率、波形和幅度可以通過微處理器模塊進行控制。系統通過AD9837產生20 mV、3 kHz的正弦波信號。
加法器模塊的功能是將擾動信號與偏置電壓相加,并將同時輸出的電壓信號加載到馬赫-曾德爾調制器的偏壓輸入端。系統選用TI公司的OPA2188運放搭建加法器電路。該芯片具有低噪聲、高共模抑制比和高增益帶寬等特點。
2.2 軟件設計
偏壓控制系統的軟件流程圖如圖4所示。
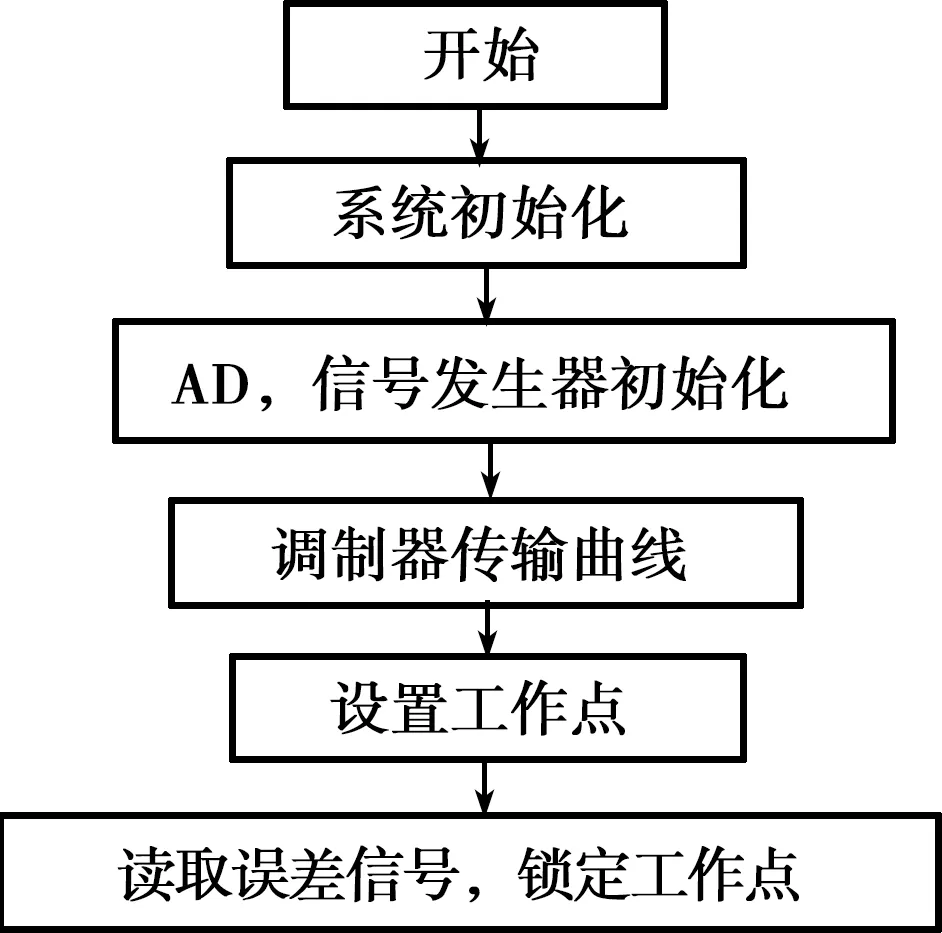
圖4 偏壓控制系統軟件流程圖
從圖4可知,馬赫-曾德爾調制器偏壓控制系統軟件主要包括系統初始化、AD和信號發生器等模塊的初始化。加載偏置電壓,按照一定步進逐步增加偏置電壓從而得到調制器輸出的光功率傳輸曲線。通過該傳輸曲線設置好初始工作點(-Q點),并采集此時的誤差信號W1,設置閾值。當采集的誤差信號W2>W1時,調整偏置電壓使得采集的誤差信號差值在閾值范圍之內,從而達到鎖定工作點的目的。
3 實驗測試
偏壓控制系統采用Oclaro公司的PowerBit SD-20型號的調制器。利用激光器作為光源,其輸出功率為10 dBm,波長為1 550 nm,信號源選用頻率為12 GHz、功率為-5 dBm的連續波作為調制器的射頻調制信號。偏壓控制系統實驗流程如下:
(1) 初始化系統,激光器輸出功率為10 dBm對調制器設置0~6 V、步進為0.1 V的偏置電壓,得到調制器的初始傳輸曲線。記錄此時-Q點對應的輸出光功率和對應的偏置電壓。初始傳輸曲線如圖5所示。
(2) 系統為了測試偏壓控制系統的有效性,將偏置電壓設置為-Q點對應的偏置電壓,通過對比有無偏壓控制下的光功率去驗證偏壓控制系統的有效性。
(3) 系統選擇-Q點位置的偏置電壓為4.7 V。在室溫條件下,間隔5 min加載偏壓控制系統,測試隨時間變化而輸出的光功率。另外,通過穩壓源輸出4.7 V的固定電壓加載于調制器上,測試輸出的光功率。最后得到有無偏壓控制下的-Q點對應的光功率曲線,如圖6所示。
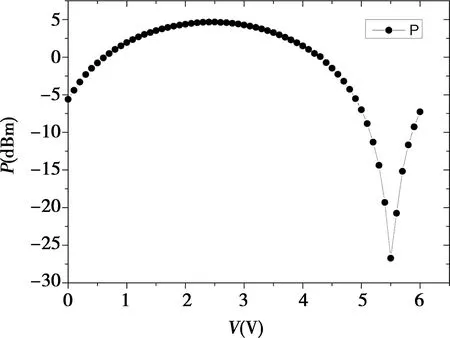
圖5 初始傳輸曲線
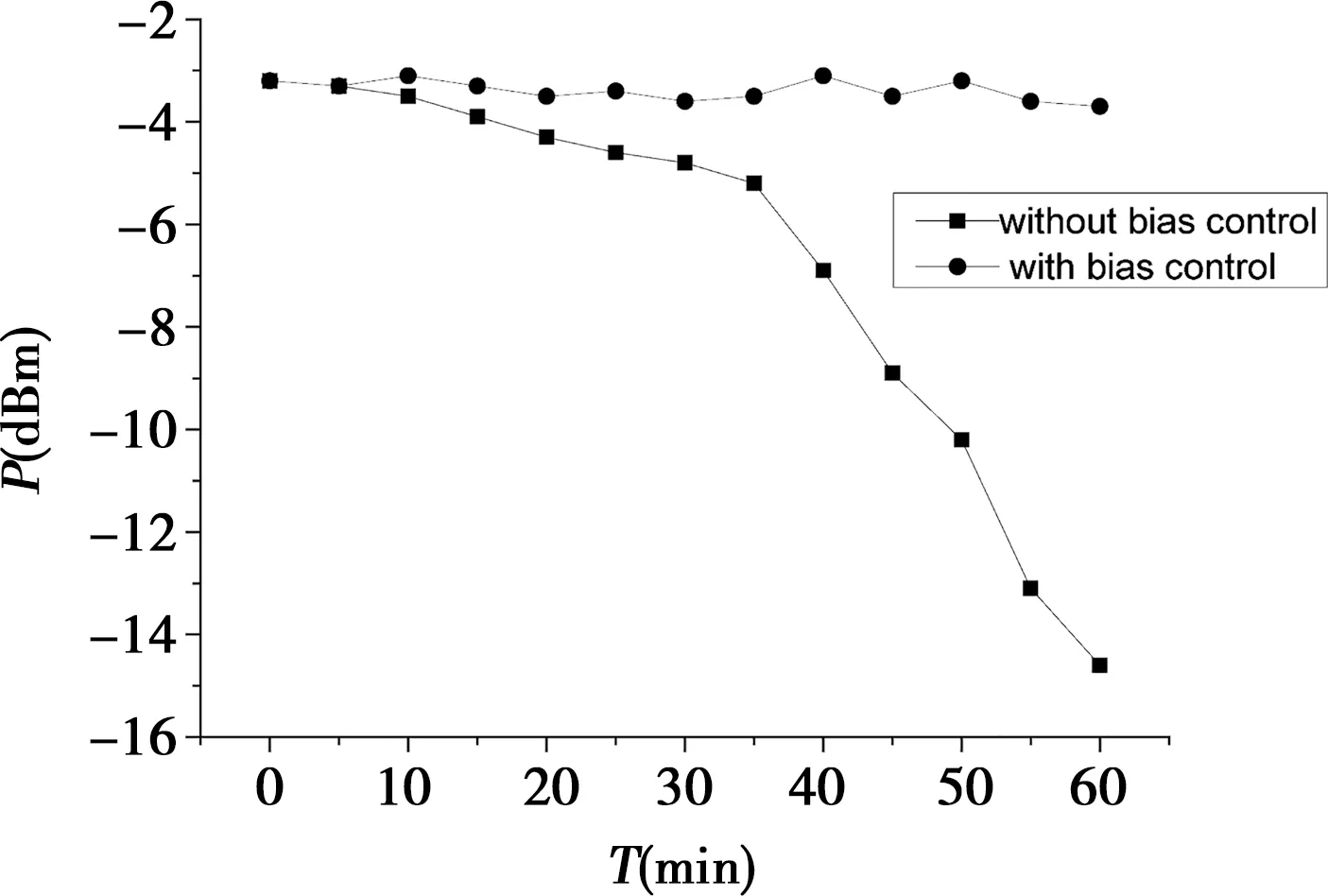
圖6 加載與未加載偏壓控制系統-Q點的輸出功率
由圖6可知,若未加載偏壓控制系統,通過穩壓源直接加載調制器固定電壓時其固定電壓對應的光功率發生了明顯變化,傳輸曲線發生了飄逸;當加載偏壓控制系統后,偏壓控制系統鎖定了工作點,-Q點的光功率較為穩定。
4 結束語
本文分析了基于馬赫-曾德爾調制器傳輸曲線斜率檢測算法的偏壓控制的原理,設計了偏置電壓自動控制電路,并對偏壓控制系統的硬件組成和軟件流程進行了分析,最后通過實驗測試驗證了偏壓控制系統工作的有效性,解決了馬赫-曾德爾調制器工作點漂移的問題。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06