基于Unity 3D的地鐵信號設(shè)備綜合仿真平臺研究
2019-09-28 02:26:52孔德龍胡萬欣
實(shí)驗(yàn)技術(shù)與管理 2019年9期
孔德龍,胡萬欣
基于Unity 3D的地鐵信號設(shè)備綜合仿真平臺研究
孔德龍,胡萬欣
(中南民族大學(xué) 計(jì)算機(jī)科學(xué)學(xué)院,湖北 武漢 430074)
根據(jù)地鐵信號基礎(chǔ)設(shè)備的結(jié)構(gòu)和原理,建立了基于虛擬現(xiàn)實(shí)技術(shù)的實(shí)驗(yàn)教學(xué)綜合仿真平臺。利用Unity 3D實(shí)現(xiàn)地鐵信號基礎(chǔ)設(shè)備機(jī)械結(jié)構(gòu)、動作原理以及裝配順序的三維建模,并模擬地鐵列車運(yùn)行駕駛模式。利用該仿真平臺,能夠使學(xué)生快速理解和認(rèn)知信號基礎(chǔ)設(shè)備的技術(shù)參數(shù)、機(jī)械結(jié)構(gòu)、動作原理、裝配順序和地鐵列車的運(yùn)行模式,提高軌道交通專業(yè)課程教學(xué)和實(shí)驗(yàn)教學(xué)的效率并降低實(shí)驗(yàn)成本。
地鐵信號設(shè)備;駕駛模式;虛擬現(xiàn)實(shí);Unity 3D;實(shí)驗(yàn)教學(xué)
信號基礎(chǔ)設(shè)備是保證地鐵安全運(yùn)行的關(guān)鍵技術(shù)裝備[1-3]。由于地鐵列控系統(tǒng)通過信號設(shè)備來保證列車安全運(yùn)行,實(shí)現(xiàn)列車的轉(zhuǎn)線、速度控制等,因此要求軌道交通類專業(yè)的學(xué)生掌握信號設(shè)備的基本原理、結(jié)構(gòu)等專業(yè)知識,學(xué)校對實(shí)驗(yàn)教學(xué)的要求也越來越高。但是,目前由于地鐵現(xiàn)場不對外開放,且地鐵信號設(shè)備一般體積都比較大、價(jià)格昂貴,因此對實(shí)物實(shí)驗(yàn)設(shè)備的采購成本偏高,實(shí)驗(yàn)室無法真實(shí)再現(xiàn)地鐵場景,導(dǎo)致學(xué)生動手實(shí)踐能力受到限制。更重要的是,在軌道交通設(shè)備實(shí)驗(yàn)過程中很容易發(fā)生零件丟失、損壞、裝配不良,甚至?xí)霈F(xiàn)砸傷、碰傷等安全事故,給實(shí)驗(yàn)教學(xué)帶來諸多不利。
利用虛擬現(xiàn)實(shí)技術(shù)可以創(chuàng)建和體驗(yàn)虛擬世界的計(jì)算機(jī)仿真系統(tǒng)。該系統(tǒng)利用計(jì)算機(jī)生成模擬環(huán)境,是多源信息融合、交互式的三維動態(tài)視景和實(shí)體行為的系統(tǒng)仿真,使用戶沉浸在虛擬環(huán)境中[4-5]。目前虛擬現(xiàn)實(shí)技術(shù)在醫(yī)療、航空、軍事等領(lǐng)域得到了廣泛的應(yīng)用。若將其應(yīng)用于軌道交通類專業(yè)實(shí)驗(yàn)教學(xué)中,則具有重要的現(xiàn)實(shí)意義,具有投入少、見效快的優(yōu)點(diǎn)。
Unity 3D是由Unity Technologies開發(fā)的一個可以輕松創(chuàng)建三維視頻游戲、建筑可視化、實(shí)時三維動畫等類型互動內(nèi)容的多平臺、綜合型游戲開發(fā)工具,是一個全面整合的專業(yè)游戲引擎[6-7]。本文提出在軌道交通類專業(yè)基礎(chǔ)課程的教學(xué)和實(shí)驗(yàn)中,利用Unity 3D引擎創(chuàng)建地鐵信號設(shè)備綜合仿真平臺,實(shí)現(xiàn)對地鐵運(yùn)行場景、信號機(jī)、轉(zhuǎn)轍機(jī)、軌道電路等基礎(chǔ)設(shè)備的三維仿真建模,分析和模擬實(shí)現(xiàn)地鐵列車運(yùn)行模式,使學(xué)生能夠建立起理論和實(shí)踐的聯(lián)系,更好地理解和掌握本專業(yè)基礎(chǔ)設(shè)備的原理和功能,提高軌道交通信號專業(yè)基礎(chǔ)課程的教學(xué)質(zhì)量。
1 地鐵信號基礎(chǔ)設(shè)備
1.1 信號機(jī)的組成及作用
地鐵列車在線路上運(yùn)行時,需要及時了解前方信息,需要根據(jù)鐵路信號控制行駛速度,而信號機(jī)是一種最常用的列車控制視覺信號[8]。信號機(jī)通過顯示不同的顏色信息,將列控信息傳遞給列車駕駛員。
地鐵正線信號系統(tǒng)中主要采用三顯示LED信號機(jī),它主要由LED發(fā)光組件和信號機(jī)附屬組件組成,其中LED發(fā)光組件是信號機(jī)的核心部分,實(shí)現(xiàn)信號機(jī)不同顏色的顯示。三顯示LED信號機(jī)有4種顯示含義:
(1)紅燈:禁止通行,必須在信號機(jī)前停車;
(2)綠燈:允許通行,進(jìn)路中所有道岔開通直向,表示按規(guī)定速度運(yùn)行;
(3)黃燈:允許通行,進(jìn)路中至少有一組道岔開通側(cè)向,表示注意或降低速度;
(4)紅燈+黃燈:引導(dǎo)信號,允許司機(jī)駕駛列車在規(guī)定速度下(不超過25 km/h)越過信號機(jī),并隨時準(zhǔn)備停車。
1.2 道岔、轉(zhuǎn)轍機(jī)的組成及結(jié)構(gòu)
(1)道岔的組成及結(jié)構(gòu)。由于轉(zhuǎn)轍機(jī)的作用是驅(qū)動道岔完成道岔位置的轉(zhuǎn)換,因此首先對道岔的結(jié)構(gòu)進(jìn)行分析和研究。道岔是列車從一條股道轉(zhuǎn)向另一股道的轉(zhuǎn)轍設(shè)備[5]。道岔主要由基本軌、尖軌、直合攏軌、彎合攏軌、翼軌、轍岔心和護(hù)輪軌組成,其中基本軌和尖軌是道岔最重要的組成設(shè)備[8]。圖1為道岔基本結(jié)構(gòu)示意圖。與正線線路連接的兩根鋼軌稱作道岔的基本軌,而尖軌是道岔的可動部分。道岔的尖軌有兩根,一根離開基本軌而另一根則密貼于基本軌。道岔位置的變換是通過轉(zhuǎn)轍機(jī)拖動尖軌實(shí)現(xiàn)的。
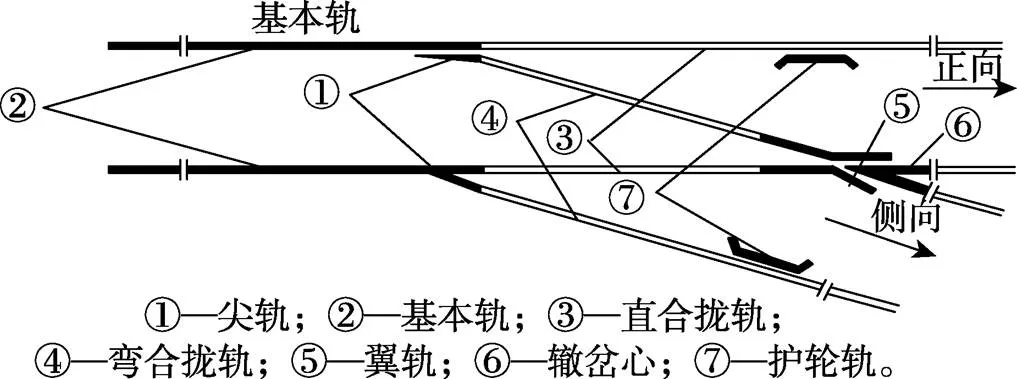
圖1 道岔基本結(jié)構(gòu)示意圖
(2)ZD6型轉(zhuǎn)轍機(jī)基本結(jié)構(gòu)分析。ZD6型轉(zhuǎn)轍機(jī)是一種直流電動轉(zhuǎn)轍機(jī),是我國鐵路系統(tǒng)中最常用的一種道岔轉(zhuǎn)換設(shè)備,廣泛應(yīng)用在國鐵、地鐵系統(tǒng)中[9]。ZD6型轉(zhuǎn)轍機(jī)主要由電動機(jī)、減速器、摩擦聯(lián)結(jié)器、主軸、動作桿、表示桿、自動開閉器、外殼等組成[9]。圖2為ZD6型轉(zhuǎn)轍機(jī)的結(jié)構(gòu)示意圖。
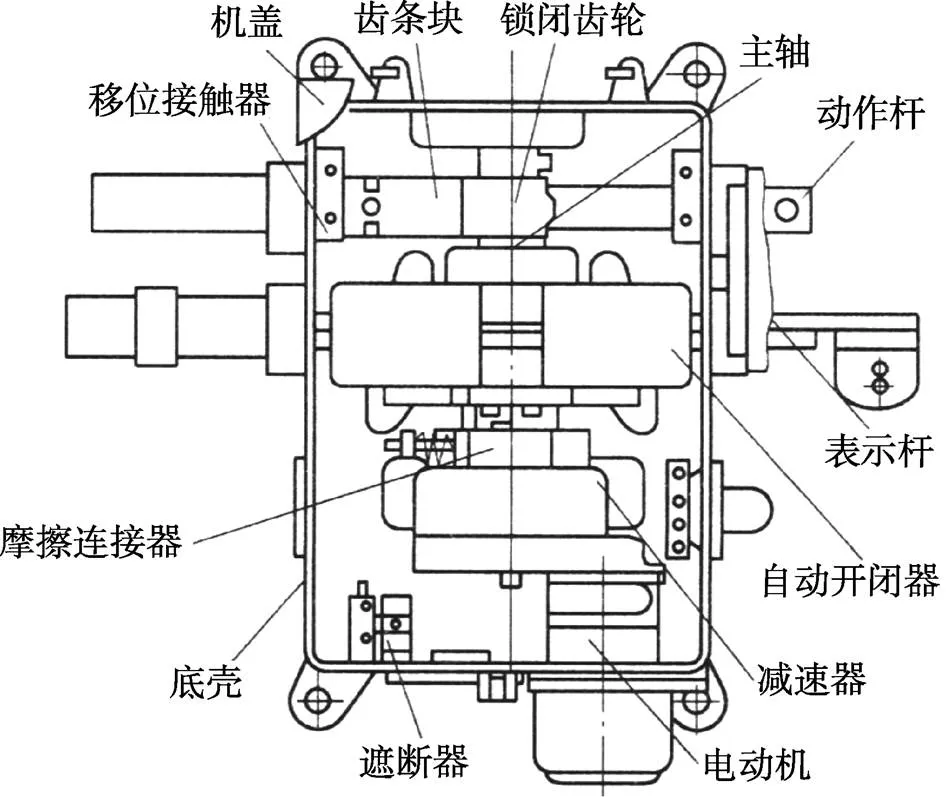
圖2 ZD6型轉(zhuǎn)轍機(jī)結(jié)構(gòu)示意圖
1.3 軌道電路的組成及原理
軌道電路是軌道交通信號系統(tǒng)的重要設(shè)備之一。軌道電路以2根鋼軌為導(dǎo)體,構(gòu)成一個閉合回路;當(dāng)列車車輪軋入回路時,由于輪對材質(zhì)為導(dǎo)體,因此使閉合回路短路,從而完成對列車位置的檢測。
軌道電路主要由軌道電源E、限流電阻R、軌道繼電器GJ、鋼軌絕緣、跳線和2根鋼軌組成[10-11](見圖3)。

圖3 軌道電路原理圖
軌道電路在地鐵信號系統(tǒng)中不僅能夠檢測列車位置,而且還可以實(shí)現(xiàn)鋼軌的完整性檢查。當(dāng)鋼軌出現(xiàn)斷裂時,閉合回路發(fā)生斷路,使軌道繼電器落下,從而保證列車的安全行駛。
2 地鐵列車運(yùn)行模式分析
地鐵列車在正線運(yùn)行主要有5種運(yùn)行模式[12]:
(1)自動駕駛模式:通過車載及軌旁設(shè)備實(shí)現(xiàn)列車的自動駕駛,無須駕駛員操作;
(2)連續(xù)式速度防護(hù)下的人工駕駛模式:由連續(xù)式的速度防護(hù)系統(tǒng)監(jiān)督,并由駕駛員手動駕駛,當(dāng)列車速度超過該段軌道線路容許行駛的最高速度時,列車將由車載設(shè)備自動完成制動,速度降為0之后才能再次人工啟動;
(3)點(diǎn)式速度防護(hù)下的人工駕駛模式:與連續(xù)式速度防護(hù)下的人工駕駛模式相似,不同點(diǎn)在于速度防護(hù)系統(tǒng)的車-地通信方式為點(diǎn)式;
(4)限制人工駕駛模式:駕駛員手動駕駛,但列車速度不得超過25 km/h;
(5)非限制人工駕駛模式:由駕駛員手動駕駛,列車速度不受限制。
3 虛擬實(shí)驗(yàn)平臺的開發(fā)
本實(shí)驗(yàn)平臺的開發(fā)是為了滿足學(xué)生理解信號設(shè)備的結(jié)構(gòu)、原理,了解地鐵列車運(yùn)行模式的實(shí)現(xiàn)方法。根據(jù)信號仿真平臺的教學(xué)要求,該平臺開發(fā)主要包括4部分:實(shí)物數(shù)據(jù)測量、虛擬模型及地鐵場景搭建、相關(guān)動畫添加和列車運(yùn)行模式模擬。
3.1 實(shí)物數(shù)據(jù)測量
為保證平臺實(shí)驗(yàn)數(shù)據(jù)的真實(shí)性與準(zhǔn)確性,地鐵場景及各信號設(shè)備數(shù)據(jù)均通過實(shí)際測量獲得。對可以直接測量的元件,利用游標(biāo)卡尺等工具進(jìn)行精確測量,如道岔、動作桿和表示桿等設(shè)備;而對于一些不易直接測量的元件,如電動機(jī)內(nèi)部元件、隧道場景等數(shù)據(jù),則通過相關(guān)設(shè)計(jì)單位、設(shè)備廠商以及鐵路運(yùn)營單位提供的圖紙獲得。為了使轉(zhuǎn)轍機(jī)拆裝實(shí)驗(yàn)嚴(yán)格按照實(shí)際拆裝流程進(jìn)行,通過對鐵路運(yùn)營單位及設(shè)備廠商的調(diào)研,參照國家作業(yè)標(biāo)準(zhǔn)制訂了ZD6型電動轉(zhuǎn)轍機(jī)的拆裝流程和工藝。列車運(yùn)行模式的仿真完全參照地鐵運(yùn)營公司及信號系統(tǒng)供貨商提供的技術(shù)參數(shù)實(shí)現(xiàn)。
3.2 虛擬模型搭建
地鐵場景及信號設(shè)備的三維模型搭建是本實(shí)驗(yàn)平臺建設(shè)的重點(diǎn)和難點(diǎn)。虛擬實(shí)驗(yàn)平臺開發(fā)流程如圖4所示。首先根據(jù)獲得的元件實(shí)物數(shù)據(jù)在3ds Max軟件中實(shí)現(xiàn)元件的精確測繪,構(gòu)建三維模型并進(jìn)行材質(zhì)渲染及優(yōu)化;元件處理完成后,在3ds Max軟件中進(jìn)行組合拼接,并導(dǎo)出.FBX文件;再將文件導(dǎo)入U(xiǎn)nity 3D軟件中進(jìn)行腳本編程,實(shí)現(xiàn)動作功能以及交互功能的設(shè)計(jì),最后完成實(shí)驗(yàn)平臺的系統(tǒng)建設(shè)。

圖4 虛擬實(shí)驗(yàn)平臺開發(fā)流程
(1)地鐵虛擬場景搭建。為了滿足虛擬平臺需要,在Unity 3D平臺下選擇武漢某號線地鐵真實(shí)數(shù)據(jù),搭建一個三站兩區(qū)間的實(shí)驗(yàn)場景,并增加列車模型。圖5為場景中區(qū)間隧道、列車模型效果圖。

圖5 區(qū)間隧道、列車模型效果圖
(2)地鐵信號設(shè)備模型搭建。利用3ds Max軟件實(shí)現(xiàn)信號機(jī)、道岔及轉(zhuǎn)轍機(jī)、軌道電路等外部元件、設(shè)備的三維模型搭建。通過在Unity 3D仿真軟件中利用C#語言編寫腳本程序,實(shí)現(xiàn)信號機(jī)顯示、道岔轉(zhuǎn)換動作等三維動畫效果。圖6為ZD6型電動轉(zhuǎn)轍機(jī)三維模型,該模型為ZD6型電動轉(zhuǎn)轍機(jī)的內(nèi)部結(jié)構(gòu)。通過在Unity 3D仿真軟件中利用C#語言編寫腳本程序,實(shí)現(xiàn)轉(zhuǎn)轍機(jī)內(nèi)部工作的三維動作。
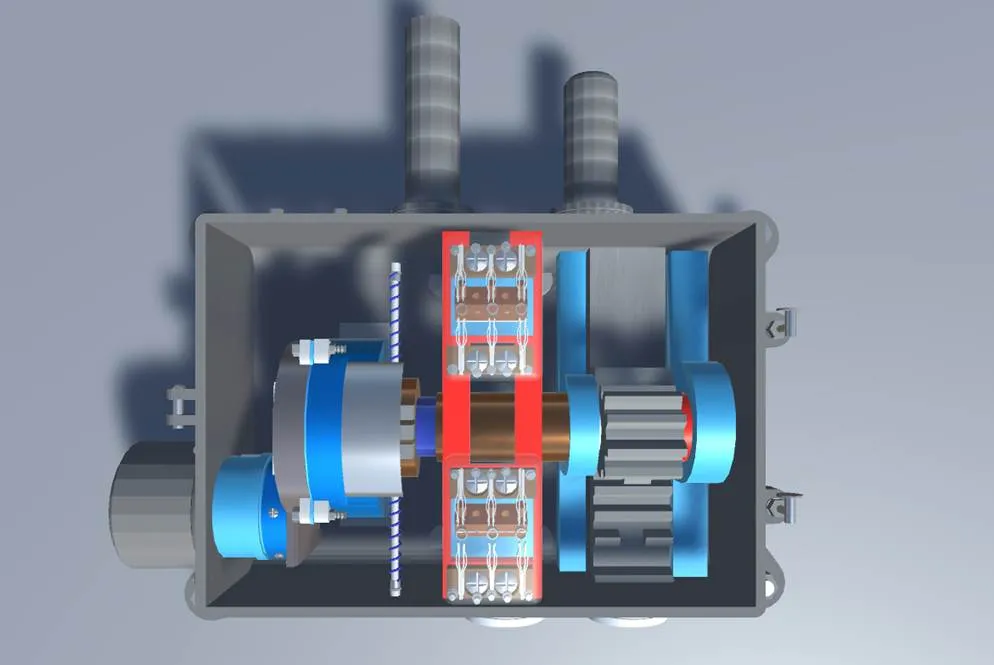
圖6 ZD6型電動轉(zhuǎn)轍機(jī)三維模型圖
3.3 動畫效果添加
將已經(jīng)做好的.FBX文件導(dǎo)入U(xiǎn)nity 3D軟件中,通過Unity 3D軟件自帶的編輯器,利用C#語言編寫腳本文件,實(shí)現(xiàn)信號機(jī)顯示、道岔與轉(zhuǎn)轍機(jī)的爆炸動畫效果、道岔與轉(zhuǎn)轍機(jī)聯(lián)結(jié)動作、轉(zhuǎn)轍機(jī)內(nèi)部動作的動畫演示。
3.3.1 元件查看與結(jié)構(gòu)分析
元件的查看與機(jī)械結(jié)構(gòu)分析主要是為了使學(xué)生對信號設(shè)備及其結(jié)構(gòu)有直觀的認(rèn)識和了解。通過添加爆炸圖并控制道岔及轉(zhuǎn)轍機(jī)各個元件的Transform. renderer.enabled屬性,可以實(shí)現(xiàn)元件的隱藏和顯示,而分析及提示是通過設(shè)置語言文字提示實(shí)現(xiàn)的。當(dāng)利用鼠標(biāo)或手柄點(diǎn)擊該元件模型時,該元件模型即高亮顯示,在點(diǎn)擊處顯示提示文字說明并播放語音提示。
3.3.2 交互式拆裝的實(shí)現(xiàn)
虛擬環(huán)境下實(shí)現(xiàn)轉(zhuǎn)轍機(jī)的拆裝必須符合實(shí)際拆裝的順序,因此要在交互式拆裝的過程中添加邏輯順序判斷功能,使拆裝過程具有交互性、動態(tài)性和邏輯控制性。系統(tǒng)拆裝流程如圖7所示。
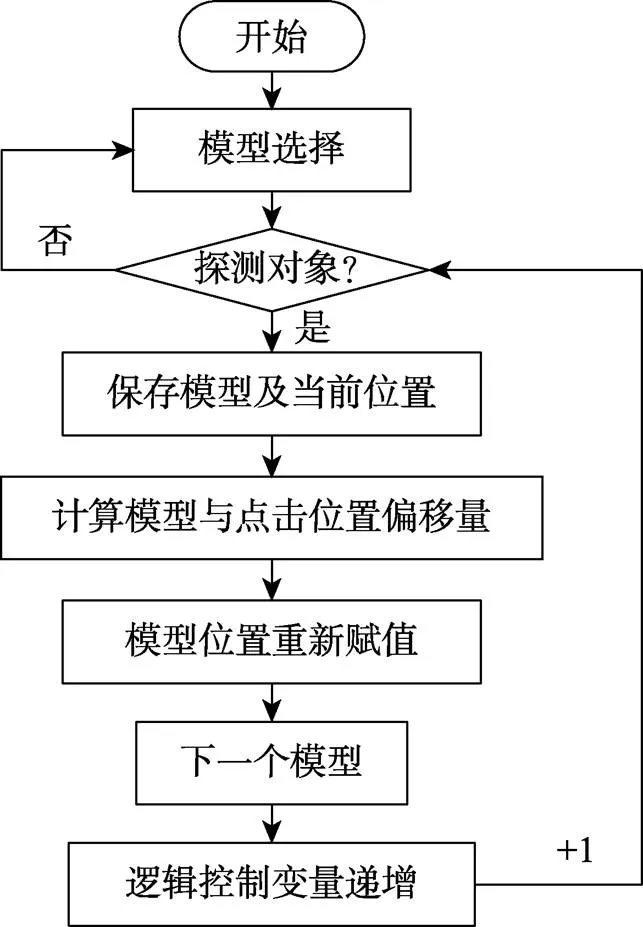
圖7 系統(tǒng)拆裝流程圖
實(shí)驗(yàn)教學(xué)平臺通過鼠標(biāo)或手柄選擇元件模型,并拖動該模型到按鍵松開的位置,實(shí)現(xiàn)設(shè)備元件的拆卸,并記錄所拆卸元件模型的順序和位置實(shí)現(xiàn)裝配。
首先,記錄所點(diǎn)擊的元件模型,并將該拆卸模型名稱及其初始位置數(shù)據(jù)分別保存在Transform組件類型的數(shù)組變量和數(shù)組變量中,其中數(shù)組變量的序號同時用于控制拆卸的邏輯順序是否正確。
其次,獲取拆卸模型時該模型的動態(tài)數(shù)據(jù)并添加拖動腳本文件,其腳本文件通過Ienumerator類型返回值,檢測拖動過程中每一幀拖動和點(diǎn)擊拖動的結(jié)果,實(shí)時計(jì)算該模型與點(diǎn)擊拖動位置的偏移量,根據(jù)拖動位置對所拆卸模型位置進(jìn)行動態(tài)賦值,從而實(shí)現(xiàn)拆卸功能。
最后,在裝配時,根據(jù)數(shù)組變量的序號及所拆卸模型的初始位置,通過數(shù)組變量的MoveTowards( )函數(shù)實(shí)現(xiàn)與拆卸順序相對應(yīng)的元件裝配。其中設(shè)置所有元件為剛體或碰撞體,使碰撞效果更加真實(shí)。
圖8為ZD6型電動轉(zhuǎn)轍機(jī)拆裝效果圖。
3.4 列車駕駛模式模擬
為了實(shí)現(xiàn)模擬列車駕駛,首先應(yīng)實(shí)現(xiàn)列車的操控,因此需搭建列車駕駛室模型。列車駕駛室內(nèi)按鈕功能的實(shí)現(xiàn)選用Unity 3D內(nèi)置的UGUI組件,為每一個可點(diǎn)擊的按鈕添加一個相符的Button物件。當(dāng)點(diǎn)擊Button物件觸發(fā)點(diǎn)擊事件時,調(diào)用OnClicked()函數(shù),函數(shù)內(nèi)封裝該按鈕相關(guān)功能的代碼,從而在不同條件下完成不同的功能。

圖8 ZD6型電動轉(zhuǎn)轍機(jī)拆裝效果圖
為了控制列車速度,利用UGUI創(chuàng)建了一個速度提示面板,并通過C#語言編程實(shí)現(xiàn)列車運(yùn)行速度計(jì)算,控制列車速度并將當(dāng)前速度及容許速度輸出到速度提示面板中。圖9為列車駕駛效果圖。

圖9 列車駕駛效果圖
4 實(shí)驗(yàn)平臺教學(xué)效果
本虛擬仿真實(shí)驗(yàn)教學(xué)平臺由本科學(xué)生在專業(yè)教師指導(dǎo)下完成,具有完全的知識產(chǎn)權(quán)。從14級本科學(xué)生開始,該平臺已在本校軌道交通類專業(yè)的教學(xué)和實(shí)驗(yàn)中使用5年。表1為使用該實(shí)驗(yàn)教學(xué)平臺之后學(xué)生成績和到課率對比統(tǒng)計(jì)表。

表1 平臺使用效果統(tǒng)計(jì)表
由表1可知,該平臺的使用對實(shí)際的教學(xué)效果以及學(xué)生綜合能力的提升有很大的促進(jìn)作用,主要表 現(xiàn)為:
(1)學(xué)生的實(shí)踐能力有了極大的提升,不再受制于實(shí)驗(yàn)設(shè)備及場地的限制。學(xué)生所學(xué)習(xí)的軌道交通信號基礎(chǔ)設(shè)備理論可以和實(shí)際設(shè)備相結(jié)合,提高了學(xué)生的實(shí)踐能力,為后續(xù)軌道交通專業(yè)課程的學(xué)習(xí)打下了堅(jiān)實(shí)的基礎(chǔ)。
(2)激發(fā)了學(xué)生的學(xué)習(xí)興趣,學(xué)生到課率明顯提高。學(xué)生基于該平臺設(shè)計(jì)的智能交通項(xiàng)目曾獲得第二屆“交通·未來”大學(xué)生創(chuàng)意作品大賽三等獎2項(xiàng)。
5 結(jié)語
基于虛擬仿真平臺的實(shí)驗(yàn)教學(xué)解決了傳統(tǒng)實(shí)驗(yàn)教學(xué)過程中教學(xué)方法單一、不易進(jìn)行設(shè)備拆裝實(shí)驗(yàn)等問題,并具有成本低、損耗少且無危險(xiǎn)等特點(diǎn),是傳統(tǒng)實(shí)驗(yàn)教學(xué)的拓展。地鐵信號設(shè)備虛擬仿真實(shí)驗(yàn)使學(xué)生在虛擬地鐵三維場景中快速理解和認(rèn)知信號基礎(chǔ)設(shè)備的技術(shù)參數(shù)、機(jī)械結(jié)構(gòu)、動作原理和裝配順序,并了解列車的運(yùn)行駕駛模式,提高了軌道交通信號基礎(chǔ)設(shè)備實(shí)驗(yàn)教學(xué)的效率,取得了較好的實(shí)驗(yàn)教學(xué)效果。
[1] 郭進(jìn). 鐵路信號基礎(chǔ)設(shè)備[M]. 成都:西南交通大學(xué)出版社,2008: 24–39.
[2] 李茜. 轉(zhuǎn)轍機(jī)電機(jī)故障分析與優(yōu)化設(shè)計(jì)研究[D]. 天津:天津大學(xué),2015: 1–3.
[3] 董昱. 區(qū)間信號與列車運(yùn)行控制系統(tǒng)[M]. 北京:中國鐵道出版社,2008: 38–47.
[4] 苗藝楠,申閆春. 基于Unity3D的交通事故虛擬再現(xiàn)系統(tǒng)研究[J]. 計(jì)算機(jī)仿真,2018, 35(12): 122–126.
[5] 趙琪,孫紅,孫艷梅,等. 基礎(chǔ)醫(yī)學(xué)虛擬仿真實(shí)驗(yàn)教學(xué)平臺構(gòu)建研究[J]. 實(shí)驗(yàn)技術(shù)與管理,2016, 33(11): 135–138.
[6] 譚青,魏來,任志湘,等. 基于Simulink和VRML的球式自動平衡裝置虛擬實(shí)驗(yàn)平臺研究[J]. 振動與沖擊,2016, 35(20): 1–8.
[7] TAKIYAMA K, SHINYA M. Development of a portable motor learning laboratory (PoMLab)[J]. Plos One, 2016, 11(6): e0157588.
[8] 趙博. 高鐵車站出站信號機(jī)與停車標(biāo)設(shè)置方案探討[J]. 鐵道工程學(xué)報(bào),2018, 35(10): 69–72.
[9] 王安,羅世剛,焦美鵬. 轉(zhuǎn)轍機(jī)轉(zhuǎn)換力在軌監(jiān)測方法研究[J]. 現(xiàn)代電子技術(shù),2012, 35(7): 139–141.
[10] 張友鵬,祁歡,趙斌. 軌道電路分路態(tài)檢測方法研究[J]. 鐵道學(xué)報(bào),2017, 39(1): 70–75.
[11] 孔德龍,王瑞峰,包超峰. NLMS算法在軌道電路信號解調(diào)中的應(yīng)用[J]. 科學(xué)技術(shù)與工程,2014, 14(4): 61–65.
[12] 張雄,陳斌. 地鐵B型車列車最高運(yùn)行速度選擇研究[J]. 鐵道工程學(xué)報(bào),2017, 34(10): 99–104.
Research on integrated simulation platform of subway signal equipment based on Unity 3D
KONG Delong, HU Wanxin
(School of Computer Science, South-central University For Nationalities, Wuhan 430074, China)
According to the structure and principle of subway signal basic equipment, a comprehensive simulation platform for experimental teaching based on virtual reality technology is established. By using Unity 3D, the 3D modeling of the mechanical structure, action principle and assembly sequence of subway signal basic equipment is realized and the running mode of subway train is simulated. By using this simulation platform, students can quickly understand and recognize the technical parameters, mechanical structure, action principle, assembly sequence and operation mode of the basic signal equipment. The teaching efficiency is improved and the experimental cost in the teaching and experiments of Rail Transit specialty is reduced.
subwaysignal equipment; driving mode; virtual reality; Unity 3D; experimental teaching
TP391.9
A
1002-4956(2019)09-0106-05
2019-02-27
國家自然科學(xué)基金資助項(xiàng)目(61803314)
孔德龍(1988—),男,甘肅臨夏,碩士,講師,主要研究方向?yàn)橹悄芙煌ā④壍澜煌ㄐ盘柵c控制。
E-mail: 891999579@qq.com, 2759194178@qq.com
10.16791/j.cnki.sjg.2019.09.027
猜你喜歡
中國特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價(jià)·高一版(2020年6期)2020-11-02 02:45:24
甘肅教育(2020年4期)2020-09-11 07:42:36
物理之友(2020年12期)2020-07-16 05:39:20
甘肅教育(2020年8期)2020-06-11 06:10:04
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年11期)2018-08-04 03:25:42
中國教育技術(shù)裝備(2016年11期)2016-12-01 06:53:03
工業(yè)設(shè)計(jì)(2016年12期)2016-04-16 02:52:00

- 實(shí)驗(yàn)技術(shù)與管理的其它文章
- 實(shí)驗(yàn)室環(huán)境下三維重建系統(tǒng)的誤差模型分析及設(shè)計(jì)
- 新工科人才培養(yǎng)下DSP課程教學(xué)改革設(shè)計(jì)
- 基于改進(jìn)Canny邊緣檢測算法的道路標(biāo)線檢測實(shí)驗(yàn)研究
- 基于天空區(qū)域改進(jìn)的暗通道先驗(yàn)算法研究
- 基于PPCNC提升學(xué)生工程訓(xùn)練綜合能力的實(shí)踐教學(xué)研究
- 基于正交冗余擬態(tài)調(diào)度機(jī)制的無線傳感網(wǎng)絡(luò)數(shù)據(jù)傳輸算法