實驗室環境下三維重建系統的誤差模型分析及設計
2019-09-28 02:47:18于立君宗明揚趙玉新
實驗技術與管理 2019年9期
關鍵詞:模型
于立君,王 輝,宗明揚,趙玉新
實驗室環境下三維重建系統的誤差模型分析及設計
于立君,王 輝,宗明揚,趙玉新
(哈爾濱工程大學 自動化學院,黑龍江 哈爾濱 150001)
針對實驗教學中三維場景重建過程存在的誤差擾動問題,在研究不同參數對誤差影響的基礎上,提出一種錐體相交幾何誤差模型,并利用線-圓投影法對該模型進行簡化,以此估計出多攝像機立體視覺系統中由量化誤差引起的物點定位誤差。仿真實驗測試表明,該方法具有模型簡單、計算量小等優點,適用于多攝像機視覺系統下場景的三維重建。對該模型的仿真實驗由學生在實驗室中完成,目的是培養學生的創新思維與實際動手能力。
定位誤差;錐體相交幾何誤差模型;線-圓投影法;多攝像機視覺
三維重建[1-2]是計算機實驗中建立表達客觀世界虛擬現實的關鍵技術,主要是指對多攝像機下的圖像重建三維信息的過程,它有助于人們更好地感知世界。具體方法很多,但每種方法都不可避免地存在誤差擾動。而三維重建場景中最基礎的是對空間中點的重建,因此分析點重建過程中誤差擾動對系統性能的影響,對提高重建精度具有重要意義。目前應對誤差擾動問題的方法主要有中點法[3-4]、最優化法[5-6]、正四棱錐相交法[7]及多基線多分辨率立體方法[8]等,而文獻[7]中的正四棱錐相交法是估計物點定位誤差最常用的方法,但卻存在幾何模型復雜、計算量大等問題。由此可見,高效準確的誤差模型設計已是計算機實驗中的一個典型問題[9-10]。為培養學生的創新思維與實踐動手能力,本文設計了一種線-圓投影法簡化的錐體相交幾何誤差模型,并在實驗中進行了驗證。此模型具有簡單、計算量小等優點,可指導學生在實際測量中通過設置相機位置及相機焦距等來提高測量精度。
1 三維重建系統的誤差分析
1.1 攝像機視場的規定


圖1 攝像機視場
1.2 攝像機標定


1.3 物點定位誤差分析

圖2 立體系統中兩直線相交
2 誤差模型的設計
2.1 錐體數學模型
本文設計錐體相交幾何模型用來計算由像素量化造成的定位誤差,圖3為每個像素點對應的圓錐,其基部為圓形像素點,在此基礎上可投影出不確定區域的點。此模型中,用WCS中的圓錐方程可定義一個圓,然后定義一條直線。圓的公式為:

穿過兩點的直線方程被定義為:

通過式(6),在攝像機平面上的每個像素都可看作具有不同圓心的圓。因此,一束起點為攝像機的光學中心、穿過圓形像素的射線,可被定義為一個圓錐如圖3所示,其中圓錐的空間方程[14]如下:

設軸是攝像機的光軸。式(7)在WCS中為:


2.2 線-圓投影法改進的誤差模型


圖4 線-圓投影法

其中,O是WCS中左攝像機光心坐標,是的方向向量。
將上述點映射到一個圓形像素中,如下式所示:

2.3 誤差模型分析結果
為驗證線-圓投影法的正確性,將本文模型與正四棱錐相交法進行誤差分析和復雜度比較。圖5示出了這兩種方法在同一視覺系統下不同基線長度的相對誤差曲線,其相對誤差定義如下:

其中,為WCS中物點真實位置,為物點估計位置,即不確定區域中心點位置。

表1 兩種方法計算操作數比較
3 攝像機參數對誤差影響的性能分析
本文利用Matlab仿真研究該模型在雙目攝像機系統下攝像機參數對測量誤差的影響。攝像機的初始參數如表2所示,在研究單一參數對物點定位誤差的影響時,其他參數設置為初始參數。在所有仿真中,通過求得不確定區域邊界點,利用邊界點構造不確定區域體積,以此來衡量物點定位誤差。

表2 雙目攝像機參數
圖6中(a)到(f)分別是基線長度、焦距大小、像素尺寸、物點距離、不同深度下的基線長度以及不同物點位置對不確定區域體積的影響。由圖6(a)可知,估計誤差隨基線長度增加而減小,這是由于物點處于某特定位置,當兩攝像機間距離增加時,像平面上投影點距離其中心更遠,像素圓錐變得更窄,導致兩圓錐體相交區域變小,從而物點定位誤差也減小;由圖6(b)可知,估計誤差隨焦距長度增加而減小,這是由于每個像素圓錐會隨攝像機焦距的增加變得更窄,進而產生更小的誤差;由圖6(c)可知,估計誤差隨像素尺寸增加而變大,因為從較小圓形像素中發出的圓錐比從較大像素發出的圓錐更窄,產生誤差更小;由圖6(d)可知,物點距攝像機距離越遠,估計誤差越大,因為目標越遠離攝像機,其在攝像機平面上的投影就越接近圖像平面中心,會產生較大圓錐,誤差更大;由圖6(e)可知,基線相同時不同深度下的誤差是不同的,深度越大,誤差越大;由圖6(f)可知,平行于攝像機平面的所有物點的估計誤差。通過上述仿真結果可知,被映射到離攝像機中心更遠的物點具有更小的誤差。
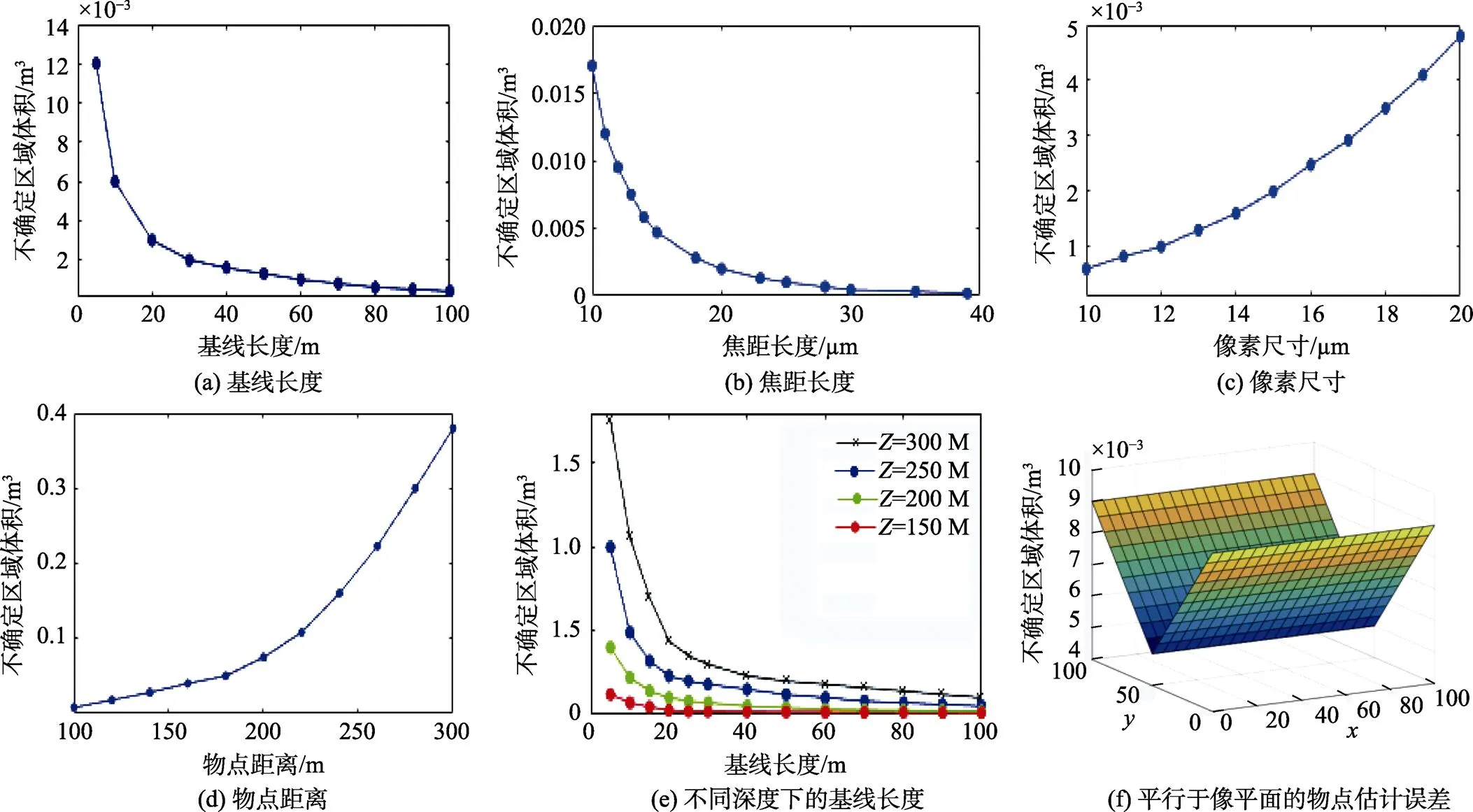
圖6 雙目攝像機參數對誤差影響仿真圖
4 結語
本文通過設計基于線-圓投影法簡化的椎體相交幾何誤差模型,實現了不同攝像機參數下對視覺系統的誤差分析,并經測試可知,被映射到離攝像機中心更遠的物點具有更小的誤差,可以較好地解決三維場景重建過程的物點定位誤差問題,且具有模型簡單、計算量小等優點。將該模型用于實驗教學中,能夠有效鍛煉學生的邏輯分析能力和實踐能力,對我校自動化學院的創新課程起到重要支撐作用。
[1] 揭昭斌. 基于序列圖像的空間非合作目標三維重建方法與精度分析[D]. 哈爾濱:哈爾濱工業大學,2016.
[2] 汪神岳,劉強,王超然,等. 基于雙目立體相機的室外場景三維重建系統設計[J]. 計算機測量與控制,2017, 25(11): 137–140, 145.
[3] 任甲,范寶德. 相關點搜索的等值面快速提取方法[J]. 煙臺大學學報(自然科學與工程版),2016, 29(2): 110–115.
[4] 于瀟宇,郭玉波,陳剛,等. 視覺測量中點目標的實時全局搜索[J]. 光學精密工程,2014, 22(10): 2796–2805.
[5] 高如新,王俊孟. 雙目立體視覺求取三維坐標的方法研究[J]. 計算機仿真,2014, 31(10): 296–300.
[6] 丁瑩,范靜濤,宋天喻. 雙目立體視覺檢測系統正向最優化設計方法研究[J]. 儀器儀表學報,2016, 37(3): 650–657.
[7] 徐超,李喬. 基于計算機視覺的三維重建技術綜述[J]. 數字技術與應用,2017, 28(1): 54–56.
[8] 張作昌. 基于多基線近景攝影測量技術的館藏銅鼓三維重建[J]. 湘潭大學自然科學學報,2017, 39(1): 119–122.
[9] 王輝,任昕旸,于立君,等. 肢體語言檢測與跟蹤實驗教學平臺設計與開發[J]. 實驗室科學,2017, 20(5): 81–84.
[10] 王輝,于立君,毛曉琦,等. 人臉活體特征檢測實驗平臺設計與實現[J]. 實驗技術與管理,2018, 35(5): 80–83.
[11] 鄭冬梅,宋文愛. 相機標定關鍵設備對標定精度的影響分析[J]. 圖學學報,2017, 38(2): 236–240.
[12] 謝曉偉,苗新剛,汪蘇. 獲取三維模型立體圖像對KFR方法的研究[J]. 現代電子技術,2018, 41(14): 55–57, 61.
[13] 夏菠. 基于雙目視覺的動態目標定位與抓取研究[D]. 綿陽:西南科技大學,2016.
[14] 魏少鵬. 基于深度相機與雙目視覺復合的三維成像技術研究[D]. 杭州:浙江大學,2015.
Error model analysis and design of 3D reconstruction system in laboratory environment
YU Lijun, WANG Hui, ZONG Mingyang, ZHAO Yuxin
(College of Automation, Harbin Engineering University, Harbin 150001, China)
In view of the problem of error perturbation in the process of 3D scene reconstruction in experimental teaching, a geometric error model of cone intersection is proposed based on the study of the influence of different parameters on the error. The model is simplified by line-circle projection method, and based on this, the object positioning error caused by quantization error in multi-camera stereo vision system is estimated. The simulation experiments show that the method has the advantages of simple model and less computation and is suitable for 3D reconstruction of scene in multi-camera vision system. This simulation experiment of this model is completed by students in the laboratory. The aim is to cultivate students’ innovative thinking and practical ability.
positioning error; vertebral body intersection geometric error model; line-circular projection method; multi-camera vision
G642.423
A
1002-4956(2019)09-0151-04
2019-01-21
黑龍江省教改項目(SJGY20170505,SJGY20170506,SJGY20180089)
于立君(1975—),男,黑龍江安達,博士,副教授,自動化學院副院長,碩士生導師,主要研究方向為船舶控制、智能控制、教學研究。
E-mail:yulijun@hrbeu.edu.cn
王輝(1976—),女,黑龍江肇東,博士,副教授,控制工程(電氣工程)實驗教學中心副主任,碩士生導師,主要研究方向為模式識別與智能系統、教學研究。
E-mail:wangh@hrbeu.edu.cn
10.16791/j.cnki.sjg.2019.09.038
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
