中鼎物流園自動化集裝箱場站的功能與成效分析
2019-10-08 02:45:24周志飛張越強
鐵道貨運 2019年9期
周志飛,張越強
(1.山西中鼎物流集團有限公司 貨裝分公司,山西 晉中 030600;2.山西中鼎物流集團有限公司 生產營運部,山西 晉中 030600)
中鼎物流園綜合性樞紐物流園,銜接太中銀鐵路(太原—中衛—銀川)、大西高速鐵路(大同—西安)、太焦鐵路(太原—焦作)、南北同蒲鐵路(大同—風陵渡)等7條鐵路干線,聯通京昆高速公路、青銀高速公路、二廣高速公路,緊鄰108國道,靠近武宿飛機場、晉中高速鐵路站。為實現集裝箱場站作業的效率最大化、作業現場“無人化”和作業裝卸機械的“本質安全”,借鑒上海洋山港四期、青島港自動化碼頭的智能作業調度系統、門式起重機(以下簡稱“門吊”)遠程控制和自動化作業、鐵路專用集裝箱自動導引運輸車(Automated Guided Vehicle,AGV)技術,根據鐵路作業的安全技術特點,中鼎物流園建成全國鐵路物流園區(貨場)首家自動化集裝箱場站,以智能作業調度為“大腦”,門吊遠程操作為“神經”,集裝箱AGV為“車輪”,改變了采用傳統人工作業模式存在的作業效率低、工人勞動強度大、箱區箱位管理手段落后、現場作業人員多,安全風險大等問題,形成具有鐵路特點的集裝箱自動化作業系統。
1 中鼎物流園自動化集裝箱場站功能分析
1.1 智能化裝卸作業調度指揮功能
中鼎物流園自動化集裝箱場站采用了集裝箱場站智能化裝卸作業調度指揮系統[1]。該系統由基礎信息設置、堆場作業系統、計劃作業制定、裝卸作業指令、裝卸設備管理、外部系統接口和系統用戶管理8個功能模塊組成。此外,與智能化裝卸設備系統、集裝箱門檢系統、集卡停靠位置檢測系統和鐵路車號識別系統等外部系統建立信息交換功能。中鼎物流園集裝箱場站智能化裝卸作業調度指揮系統功能模塊示意圖如圖1所示。
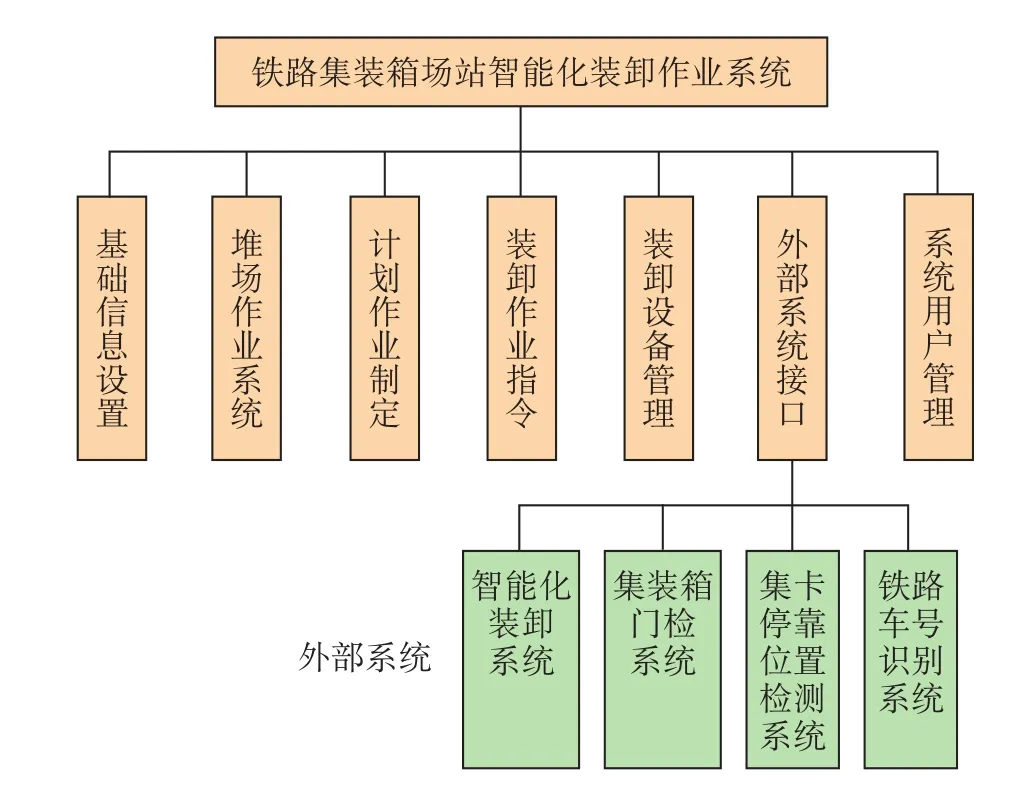
圖1?中鼎物流園集裝箱場站智能化裝卸作業調度指揮系統功能模塊示意圖Fig.1 Diagram of the function modules of the intelligent scheduling and commanding system for the container station at the Zhongding logistics park
中鼎物流園集裝箱場站智能化裝卸作業調度指揮系統與傳統的集裝箱場站管理系統的主要區別是不再僅僅對集裝箱的箱區、箱位信息進行采集和管理,而是側重于從效率和安全角度,對裝卸作業設備作業流程進行管理和指揮[2]。其主要優點是在基于長期鐵路集裝箱場站作業經驗的基礎上,借助于先進的智能調度技術、傳感檢測技術、精確定位技術、網絡通信技術、智能識別技術,按照堆碼原則、路徑優化原則、作業排隊原則、均衡作業原則,通過計算機輔助決策系統,生成自動化作業指令,通過集裝箱門吊遠程作業系統,使門吊自動或半自動按最優路徑和程序進行吊箱作業。
1.2 門吊遠程監控及操作功能
為實現門吊的遠程監控和自動化作業,采用了專用的門吊智能遠控操作系統,可實現的功能如下。
(1)實現門吊自動、半自動作業和遠程手動操作。園區建立了2個遠控中心,1個在門吊司機間休樓,1個在園區的調度指揮中心,2個遠控中心設備完全一樣,一主一備,正常作業由司機在間休樓操作,應急狀態下在調度中心直接操作。整個系統采用光纖通訊,確保控制信號遠程實時傳輸和減少干擾。機上系統主要是安裝各類傳感器和視頻監控設備,以實現遠程作業的測量和反饋。
(2)實現門吊及吊具的精準對位。采用多種傳感器,對門吊的起升系統、大小車走行系統、吊具系統的各項動作準確測量和精確定位,確保了整個門吊作業三維精確定位,為提高作業效率,確保作業安全提供了基本條件[3]。
(3)實現現場無人作業。采用門吊遠程控制系統,使得原來在門吊司機室操作的司機由門吊轉到遠控機房進行操作,實現人員與作業現場分離,避免作業人員人身傷亡事故的發生。為了防止非作業人員任意闖入龍門吊工作區域,導致發生意外事故,采用圍欄,將集裝箱作業區和堆場進行物理隔離,作業時整個場站可處于無人狀態。
(4)實現門吊大車自主防撞。一是通過系統軟件設置每臺門吊自身防護(運行)區域,實現交叉閉鎖,有效防撞。二是在2臺門吊上都安裝激光測距傳感器指向大車行走方向,2輛大車之間交叉測量。激光信號接入龍門吊的PLC系統,當檢測到2臺設備間距小于10 m時,實現門吊大車機構自動減速停車。三是保留原有機械限位開關防撞,以防止2臺門吊共同作業時相撞[4]。
(5)實現作業時貨物防撞。利用在門吊相關位置增加的各種檢測設備,在吊裝作業時,隨時對堆場內已有集裝箱(貨物)進行檢測,發現在作業路徑上有障礙物時,能自主停車,防止與其他貨物發生碰撞。
(6)實現集卡車輛防吊起。利用傳感器、視頻監控等方式,對作業時箱體與集卡車的相對位置進行實時測量,當系統發現車輛與貨物之間鉤掛,不符合安全要求時,將自動停止當前作業,報警后交由人工處理。
(7)實現FTR鎖安全作業。采用集裝箱四角稱重、空重箱起重量限制、激光箱底掃描、視頻監控、植入自動處理程序、故障人工干涉等多種措施,成功解決了FTR鎖自動化連續作業的難題。
1.3 鐵路專用集裝箱自動導引運輸車功能
中鼎物流園自動化集裝箱場站在全路范圍內首次采用了鐵路專用集裝箱自動導引運輸車,作為場內集裝箱水平運輸的手段,可以實現以下功能。
(1)自動導航。集裝箱AGV采用了慣性導航、視覺導航和GPS導航3種導航方式,可以實現在鐵路集裝箱場站內相對復雜的環境下自主導航。
(2)無人駕駛。集裝箱AGV是專門設計的無人導航搬運車,與在原有柴油、天然汽集卡車基礎上改造的無人集卡車有本質上的區別,可更好地實現無人駕駛作業。
(3)精準定位。洋山港四期的集裝箱AGV精準定位,是通過埋在場區地下混凝土的61199根磁釘來感知位置,并且要求地下的混凝土內不能有傳統的鋼筋等磁性物體(采用了玻璃纖維筋)[5]。如果要在已建成的鐵路物流園和集裝箱中心站采用磁釘定位法比較困難,中鼎物流園采用了GPS差分站、地面視覺識別等綜合手段,保證了集裝箱AGV的精確定位[6]。
(4)自主規劃路徑。集裝箱AGV可實現在智能化裝卸作業調度指揮系統的指揮下,接收作業令,根據作業位置自主規劃行駛路徑,與門吊作業相互配合協調工作,形成一個集成化較高的自動化作業系統。
(5)安全自主避障。在鐵路物流園,集裝箱AGV要進入集裝箱堆場、過鐵路道口、進入庫區、進入海關監管區等,會與行人、機車車輛、汽車、裝卸作業機具等發生干涉,安全避障要求更高。集裝箱AGV采用三重安全防護措施,確保安全自主避障。集裝箱AGV主動防護設備布置圖如圖2所示。
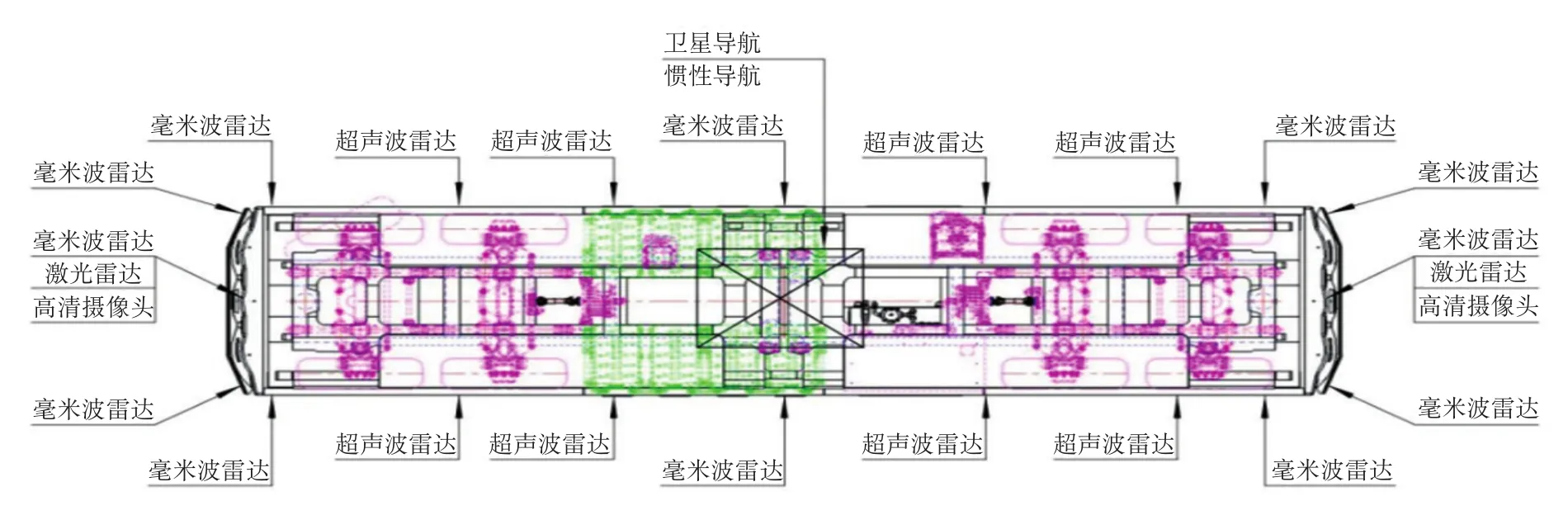
圖2?集裝箱AGV主動防護設備布置圖Fig.2 Layout of container AGV active protective equipment
(6)安全通過鐵路道口。集裝箱AGV可與中鼎物流園智能無人道口系統無線聯接,當集裝箱AGV過道口前,與無人道口系統進行通訊,預計有列車通過時,主動停車,待列車通過智能道口恢復通行后,自動繼續作業。
(7)與倉庫門對接。集裝箱AGV可以按系統指定,行駛到庫區,與倉庫大門進行對接,完成庫區掏裝箱作業。
(8)自主進行海關作業區和集裝箱安檢儀作業。可發揮集裝箱AGV無人的特點,使用集裝箱AGV進行集裝箱進出海關監管作業區卡口,減少人員查驗的麻煩。采用集裝箱AGV通過大型集裝箱安檢儀,可以不使用安檢儀的車輛牽引裝置,也不需要司機上下車作業,可有效提高安檢效率,減少人員受輻射風險。
2 中鼎物流園自動化集裝箱場站應用成效
2.1 提供鐵水聯運基本條件
鐵路物流園的集裝箱作業效率和信息化水平、信息交換能力,是影響開展海鐵、公鐵多式聯運的重要因素。中鼎物流園借助自動化智能場站的信息優勢,可以做到場站管理系統信息與海運船公司的箱管系統互聯互通,可實時獲得在場站內船公司集裝箱的作業、堆碼、使用信息,為與海運船公司合作提供了根本保障。2019年初,山西中鼎物流園與世界三大船運公司的馬士基航運公司(MSK)、地中海航運有限公司(MSC)、中國遠洋海運集團有限公司(COSCO)簽訂了CCA協議,成為三大海運船公司的中國內陸還箱點,并與天津港(集團)有限公司等多家公司,聯合組建了“中鼎多式聯運服務中心”,可開展全程鐵水多式聯運服務。
2.2 有效提升園區生產效率
(1)提升裝卸作業效率。中鼎物流園自動化集裝箱場站遵循最佳堆碼規則,縮短了裝卸作業路徑;應用智能調度技術,綜合優化整列火車批量作業順序,并均衡設備作業資源,減少了裝卸設備運行時間;提前進行翻箱作業,縮短裝車時間,有效提升了集裝箱站場的作業效率[7]。
(2)提高堆場利用率。通過合理規劃箱區,編制最佳堆碼規則,極大提高堆場利用率。場區所有集裝箱信息全部自動采集,不需要人工進行找箱[8]。
(3)減少作業人員。系統實現集裝箱箱位自動管理,無需進行尋箱吊裝指揮、堆場集裝箱核對、車號與箱號適配核對等工作,減少輔助作業人員。實現了只用1名司機可遠程操作2臺龍門吊,現場不需要起重工,可節省門吊司機4名,起重工10名,集卡車司機3名。
(4)降低勞動強度。應用智能調度技術,自動編制最優的裝車、卸車和倒箱等作業計劃,消除了人工編制作業計劃費時費力現象。
(5)確保作業安全。裝卸作業計劃自動生成,避免了人工編制帶來的失誤;車號與箱號適配零誤差,消除了鐵路運輸安全性問題;自動化裝卸作業區實行封閉式管理,“無人站場”作業方式也保障了輔助作業人員的人身安全。
2.3 實現綠色裝卸作業
中鼎自動化集裝箱作業場站,遵循交通運輸部制定的《關于全面加強生態環境保護堅決打好污染防治攻堅戰的實施意見》,加大了新能源和清潔能源車輛在鐵路貨場的應用。在集裝箱場站作業使用的門吊、集裝箱AGV等所有裝卸設備:全部是電能驅動,代替原有內燃機驅動的正面吊和集卡車,集裝箱作業的全過程只消耗電能,沒有廢氣排放,真正實現了場區集裝箱裝卸作業零排放、低能耗、綠色環保。
2.4 擴展企業增值項目
中鼎自動化集裝箱場站的投產,不僅提高了園區集裝箱作業水平,而且為提高園區整體服務水平,提高園區的美譽度創造了條件。中鼎物流園依托自動化集裝箱場站,開展工業旅游等附加經營活動,僅2019年4—6月,已有4 000余人次來園進行以集裝箱自動化智能為主題的研學游;基于中鼎物流園先進的物流技術應用,2019年初,山西中鼎物流園與北京交通大學簽訂了戰略合作協議,并確定為該高校的產學研實驗基地,為2019年中鼎物流園申報第一批國家物流樞紐互聯互通工程提供有力支撐。
3 結束語
中鼎物流園通過自動化集裝箱作業系統建設顯著提高了自身的集裝箱場站作業效率,使傳統的鐵路集裝箱作業具備了信息化智能化功能,使中鼎物流園高質量發展具有了新的動力引擎,為更好地融入了“一帶一路”倡議和發展海鐵、公鐵集裝箱多式聯運創造了條件。中鼎物流園集裝箱自動化場站的實施,對于提高鐵路集裝箱裝卸技術裝備水平,改變原來的裝卸技術水平由沿海港口—內河碼頭—鐵路貨場的排序,實現彎道超車,與最先進的自動化港口看齊,實現鐵路集裝箱裝卸技術裝備水平的整體性躍升有重要意義,為鐵路大型物流園、鐵路集裝箱中心站、鐵路大型集裝箱貨場的技術改造和功能提升提供了參考。
猜你喜歡
天天愛科學·科學啟蒙(2025年3期)2025-03-27 00:00:00
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
云南畫報(2021年12期)2021-03-08 00:50:54
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
鐵道通信信號(2018年7期)2018-08-29 01:17:04
故事大王(2016年7期)2016-09-22 17:30:08
通信電源技術(2016年4期)2016-04-04 02:58:04
工程建設與設計(2016年3期)2016-02-27 10:50:46
中國火炬(2015年7期)2015-07-31 17:40:05